Comment déplacer l’ascenseur de la Tower manuellement
|
Ce document décrit comment vous pouvez déplacer manuellement les ascenseurs de la Tower. |
|
Si vous rencontrez des problèmes qui empêchent le déplacement automatique du lève-personne, il est conseillé de contacter d’abord le https://www.robojob.eu/contact [département de service après-vente de RoboJob] avant d’essayer la procédure décrite dans ce document. |
1. Servez-vous des outils suivants
|
|
|
|


2. Procédure
2.1. Préparation
Avant de commencer, annulez tous les jobs programmés dans le logiciel.De cette façon, il n’y a aucune possibilité pour le logiciel d’envoyer des commandes à la Tower.
2.2. Désactiver les capteurs de courroies
Si le logiciel donne l'alarme d’ascenseur LX-07: Alarm : Belt-Stop, vous devez d’abord désactiver les capteurs de ceinture.Si l’erreur n’est pas présente, laissez les capteurs de ceinture actifs.
Pour désactiver les capteurs, allez dans l’armoire électrique sous la tower.Dans la plupart des cas, elle est située sous l’ascenseur du côté robot.

Dans l’armoire électrique se trouve un interrupteur à côté de l’automate.

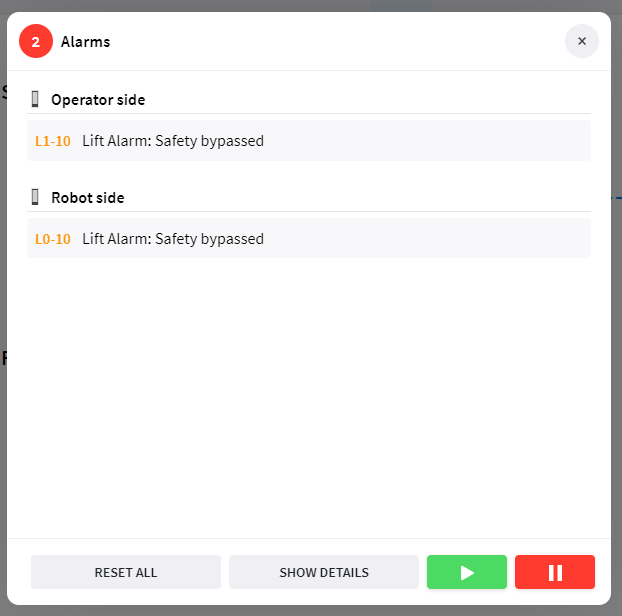
Après avoir désactivé le capteur de courroies, une erreur LX-10 s’affiche indiquant que la sécurité est contournée.Si cette erreur est donnée, cela signifie que vous l’avez fait correctement.
|
La sécurité contournée ne comprend que les capteurs de ceinture. *Les rideaux lumineux ou les clôtures peuvent toujours empêcher l’ascenseur de se déplacer. |
2.3. Déplacement des ascenseurs
2.3.1. Réinitialisation de toutes les erreurs
Avant de pouvoir déplacer les ascenseurs, toutes les erreurs doivent être réinitialisées.
Si vous avez désactivé les capteurs de courroie, l’erreur *LX-10 ne peut pas être réinitialisée.Cette erreur n’empêche pas les ascenseurs de se déplacer.
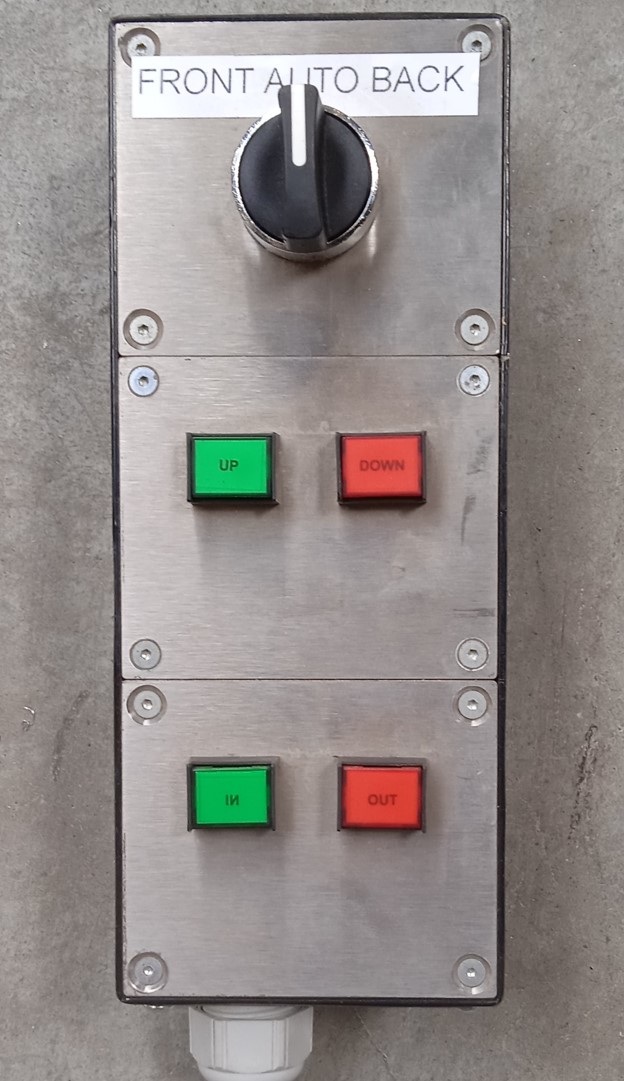
2.3.2. Utilisation de l’ordinateur de poche

Il existe 3 modes sur l’ordinateur de poche.
-
FRONT:Front vous permet de contrôler l’ascenseur du côté robot.
-
AUTO:Auto ne vous permet pas de déplacer quoi que ce soit, mais donne le contrôle au TowerPLC.
-
BACK:Back vous permet de contrôler l’ascenseur du côté de l’opérateur.

-
Montée et descente pour un mouvement vertical.
-
In et out pour le mouvement horizontal.
|
Si l’ascenseur ne se déplace pas quand vous l’attendez, il se peut qu’il y ait une erreur.*Vérifiez l’écran d’erreur et essayez de le réinitialiser. |
3. Comment obtenir de l’aide supplémentaire
N’hésitez pas à nous contacter lorsque vous avez besoin d’une assistance supplémentaire au-delà des documents fournis dans la base de connaissances du service RoboJob.
Vous pouvez contacter le service RoboJob Service en utilisant les moyens suivants:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Téléphone: +32 15 70 89 70
Nous vous prions de bien vouloir nous fournir les informations suivantes:
-
Numèro de sèrie xx-xx-xxx
-
Description de l’erreur ou de la piëce dèfectueuse
-
Message ou code d’erreur exact
-
Qu’a fait le robot
-
Qu’Ètait-il supposè faire
-
Photos ou vidèos
Vous pouvez nous envoyer ces informations par e-mail.Pour envoyer des fichiers volumineux, vous pouvez utiliser un service de transfert de fichiers comme WeTransfer: robojob.wetransfer.com.
Une confirmation automatique vous sera envoyée dès réception de votre courrier.