Préparer un robot en vue de son transport
|
The robot has to be moved manually to the home position. This document describes the procedure. |
- 1. Servez-vous des outils suivants
- 2. Procédure
- 3. Comment obtenir de l’aide supplémentaire
1. Servez-vous des outils suivants
|
|
|

2. Procédure
2.1. Passage du robot en mode manuel
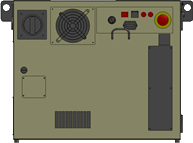
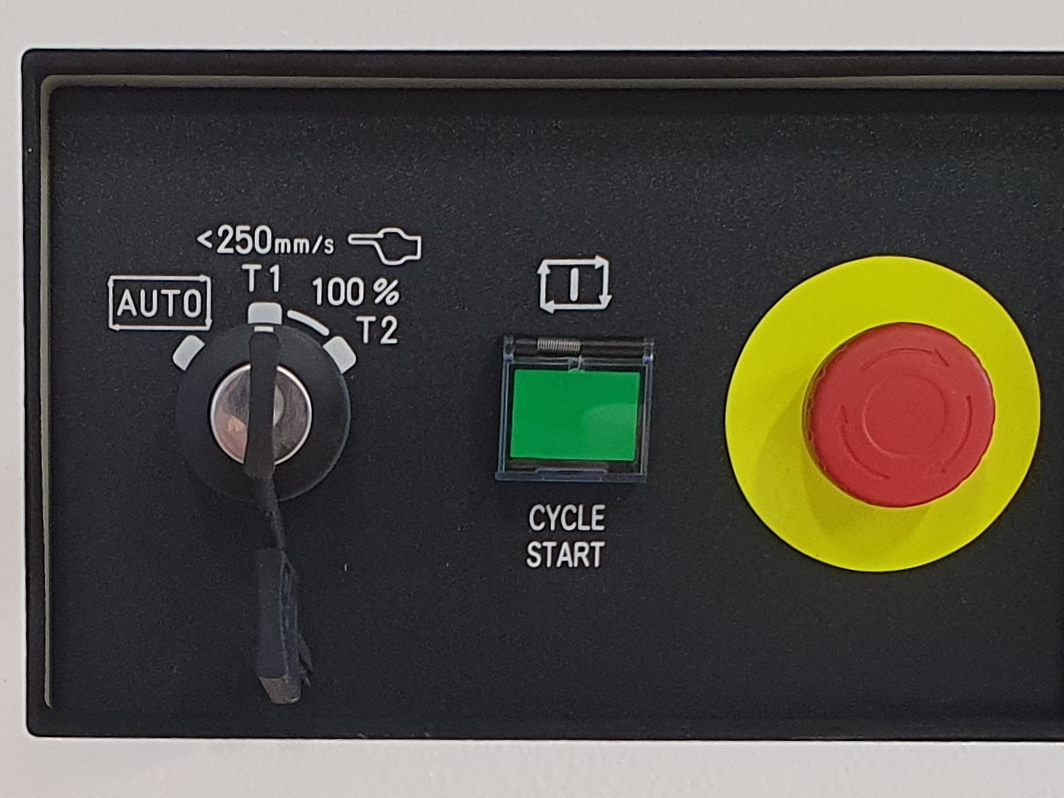
Amenez le commutateur à trois positions de l’unité de commande du robot sur la position T1-Mode.
Amenez le commutateur à deux positions du Teach Pendant sur la position On-Mode.

2.2. Abandon des programmes en cours d’exécution
Les programmes de communication RoboJob sont encore en cours d’exécution sur le robot.
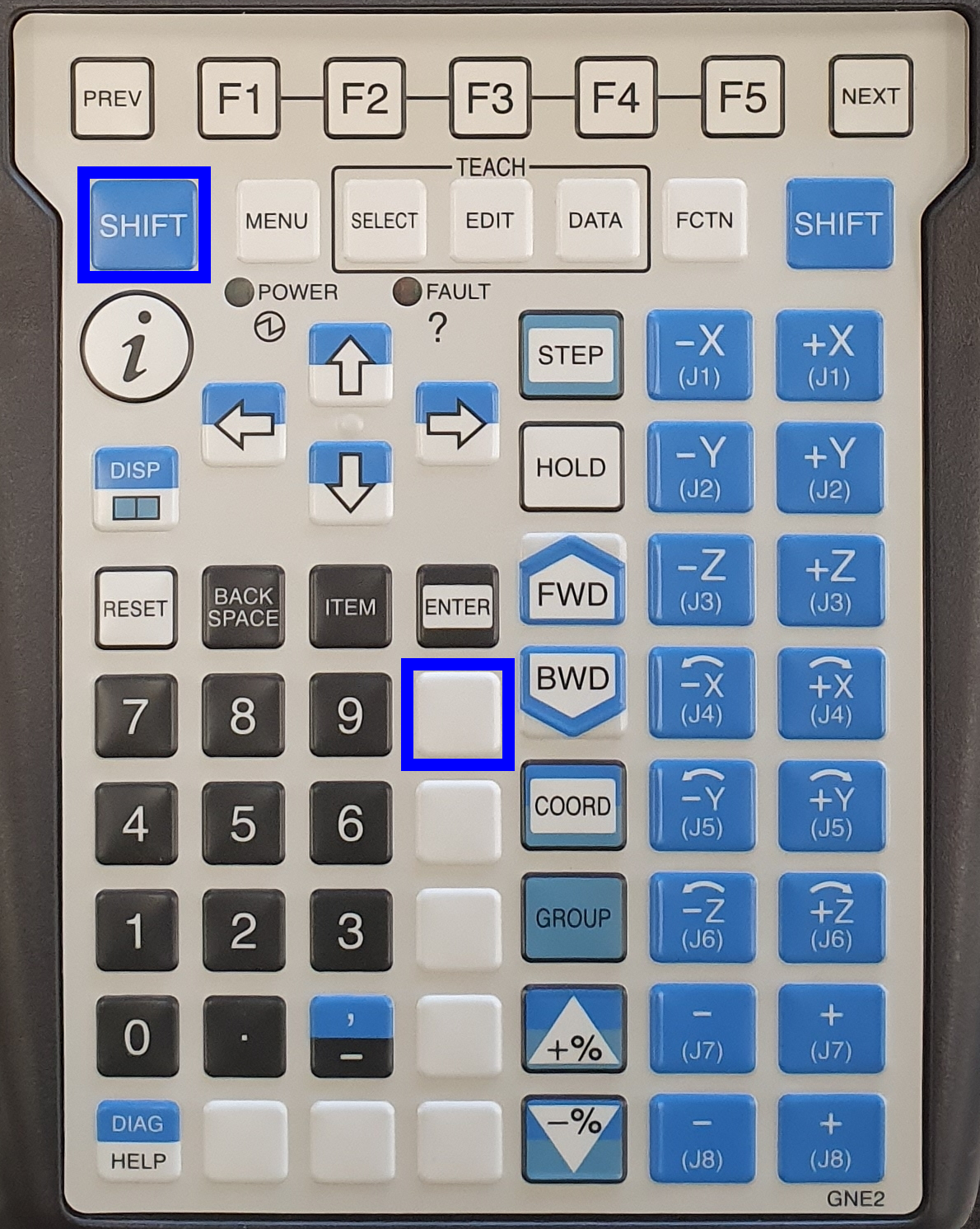
Abandonnez les programmes en cours d’exécution en appuyant sur les touches SHIFT + USER KEY 1 [MAJ. + TOUCHE UTILISATEUR 1].La touche USER KEY 1 se situe immédiatement sous la touche ENTER; on lui donne parfois le nom de Unmarked key 1 [Touche sans mention 1], Tool 1 [Outil 1] ou Unnamed 1 [Sans dénomination 1].Sur les versions plus récentes du Teach Pendant, cette touche blanche est vierge d’inscription.Sur les versions plus anciennes du Teach Pendant, cette touche portant la mention WELD ENBL est bleue.
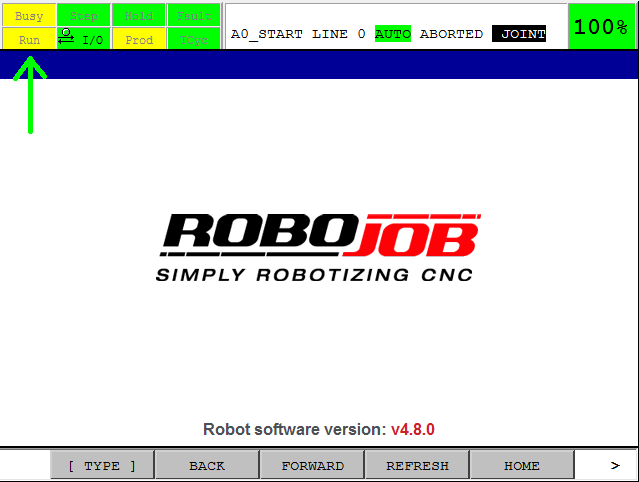
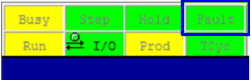
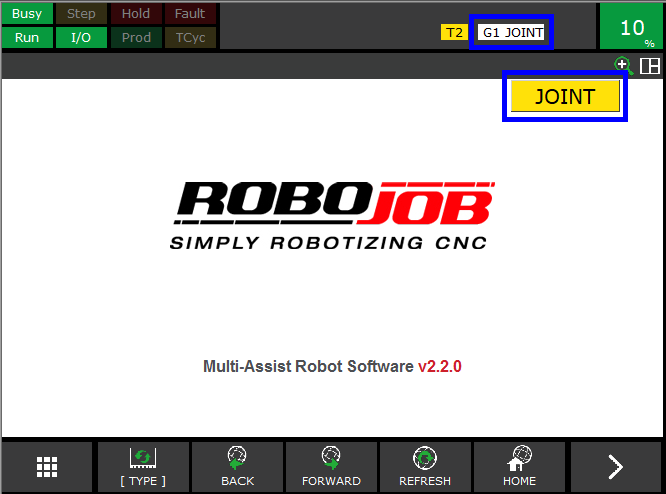
Assurez-vous de l’arrêt du logiciel.Les indicateurs Busy [Occupé] et Run [Exécution] qui s’affichent dans le coin supérieur gauche de l’écran doivent virer au jaune.
2.3. Rétablissement des valeurs par défaut et déplacement manuel du robot
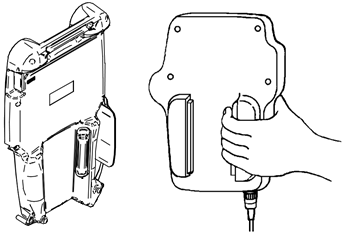
Pour déplacer le robot en toute sécurité, il convient de ramener l’un des interrupteurs de sécurité montés au dos du Teach Pendant à sa position intermédiaire de sécurité.
Les deux interrupteurs de sécurité présentent trois positions :
-
Interrupteur non sollicité
-
Position intermédiaire de sécurité
-
Interrupteur enfoncé à fond
Actionnez ces interrupteurs pour apprendre à percevoir ces trois positions.Pour rétablir les valeurs par défaut et déplacer le robot, vous ne devez ramener qu’un seul interrupteur de sécurité à sa position intermédiaire de sécurité.Par conséquent, abstenez-vous d’exercer une pression trop faible ou trop forte.
Appuyez sur la touche SHIFT [MAJ.] + RESET [RÉINITIALISER] pour lever toutes les anomalies.L’indicateur d’anomalie vire au vert.
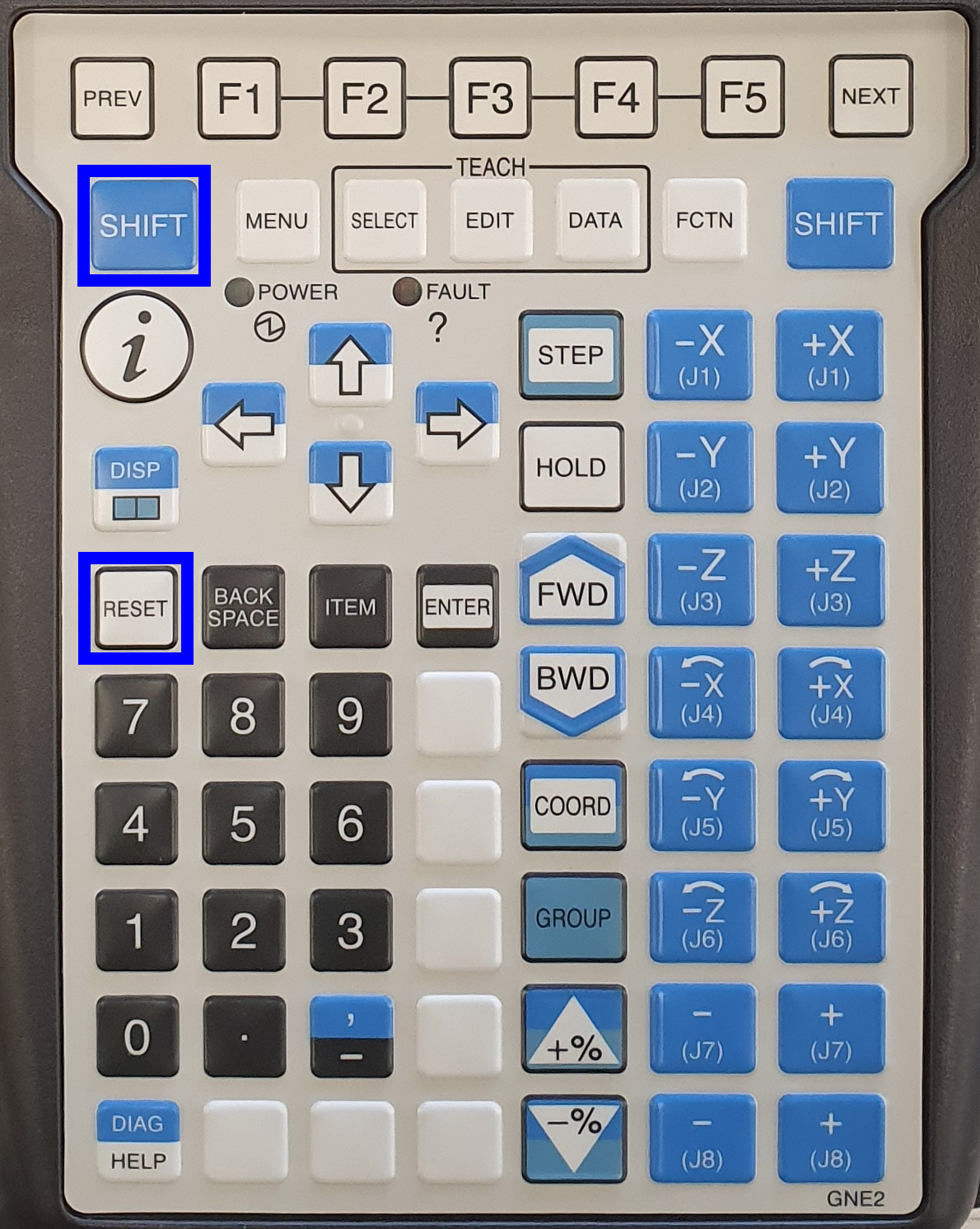
À présent, vous êtes en mesure de déplacer le robot.
| Remarque |
Veillez à ce que le robot ne heurte aucun obstacle pendant son déplacement.Soyez attentif aux personnes, aux machines environnantes, aux obstacles éventuels et au robot en tant que tel.Veillez à ne pas endommager les câbles montés autour du robot.
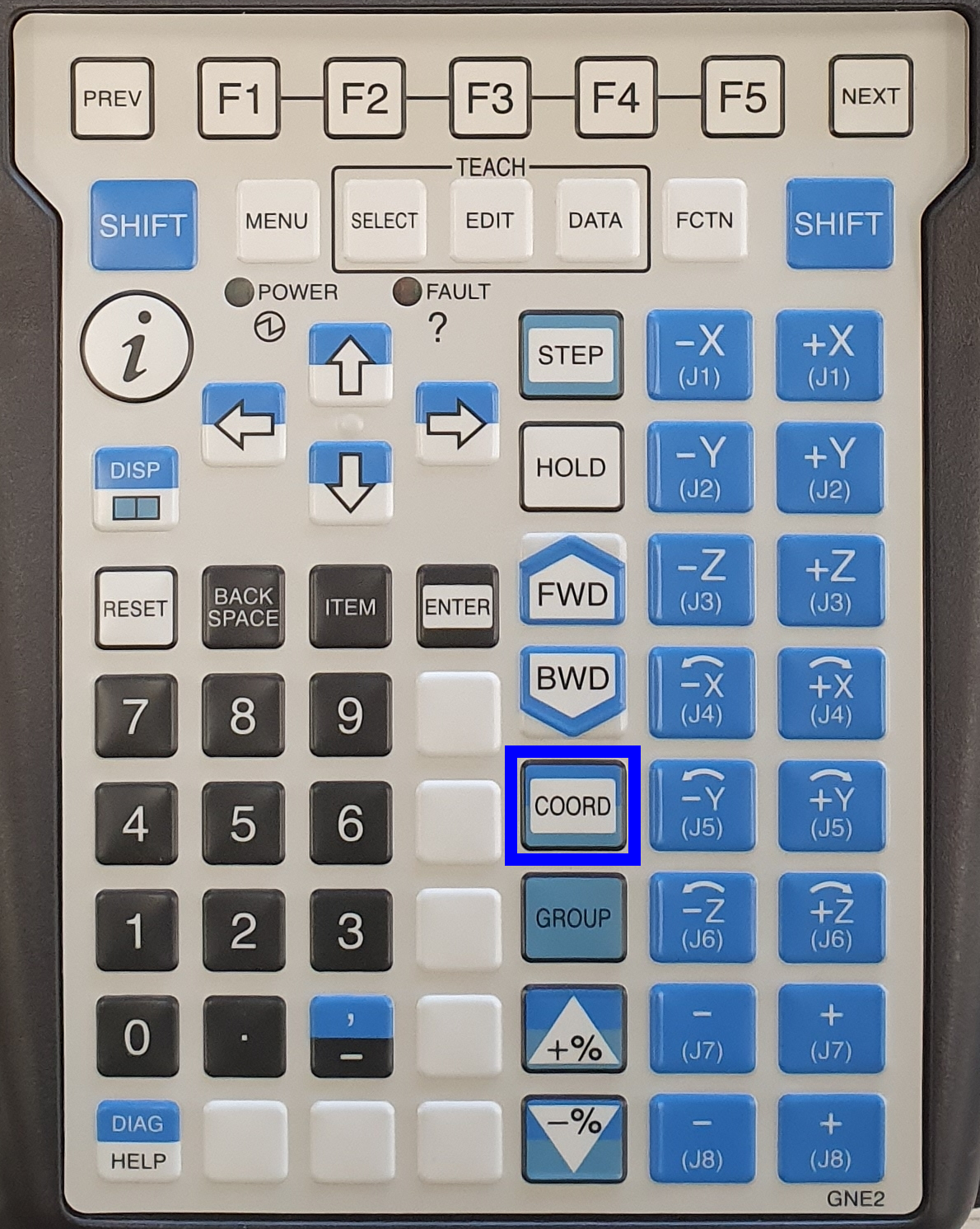
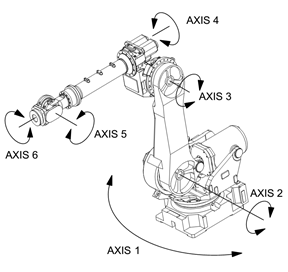
Appuyez sur la touche COORD pour modifier la direction de déplacement.Continuez à appuyer jusqu’à ce que l’option JOINT [ARTICULATION] soit sélectionnée.Le mode de déplacement JOINT [ARTICULATION] est le plus simple à utiliser.Il permet d’agir individuellement sur les articulations du robot.
|
|
|
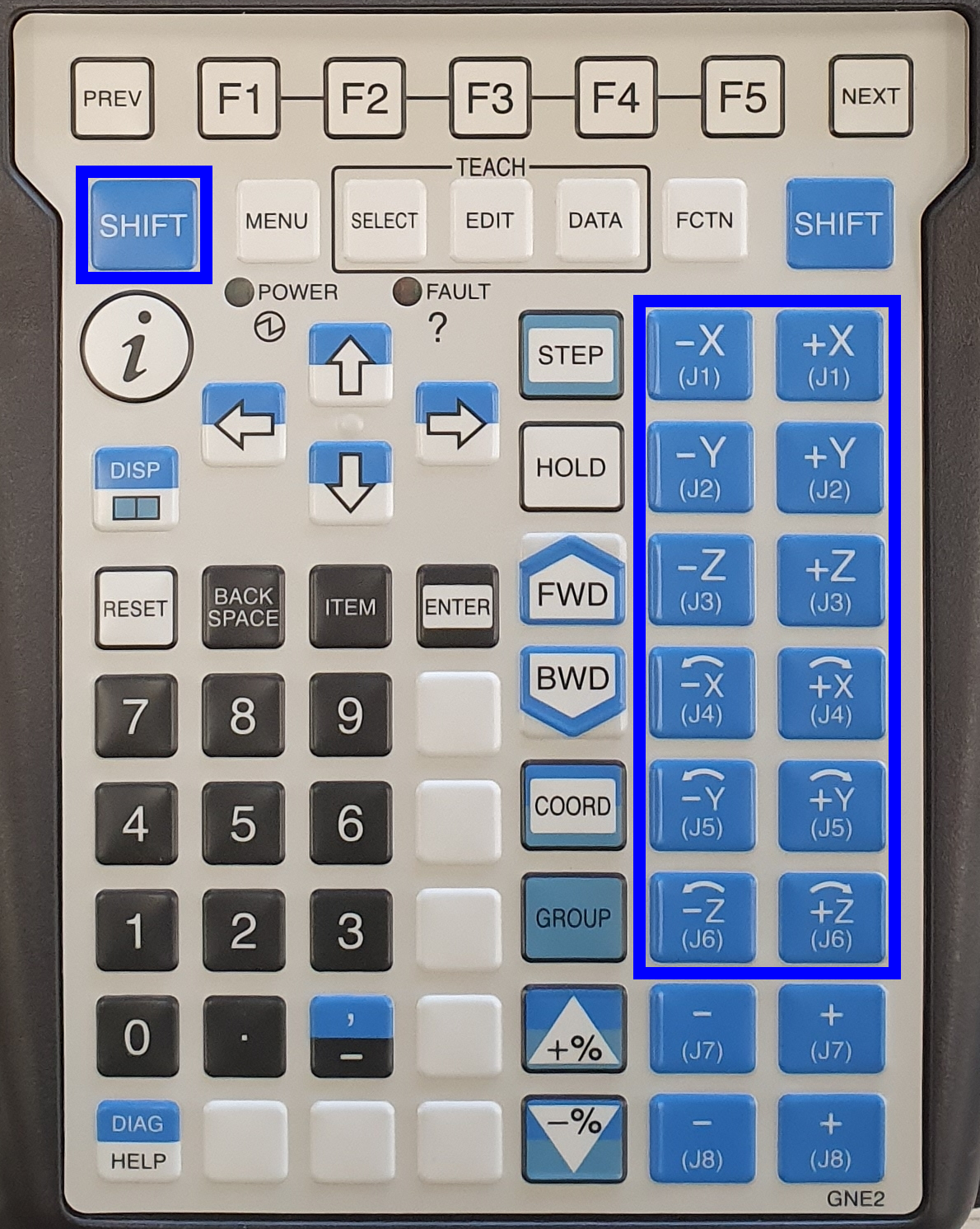
Appuyez sur les touches SHIFT [MAJ.] + ±J1-8 pour déplacer le robot.
|
|
|
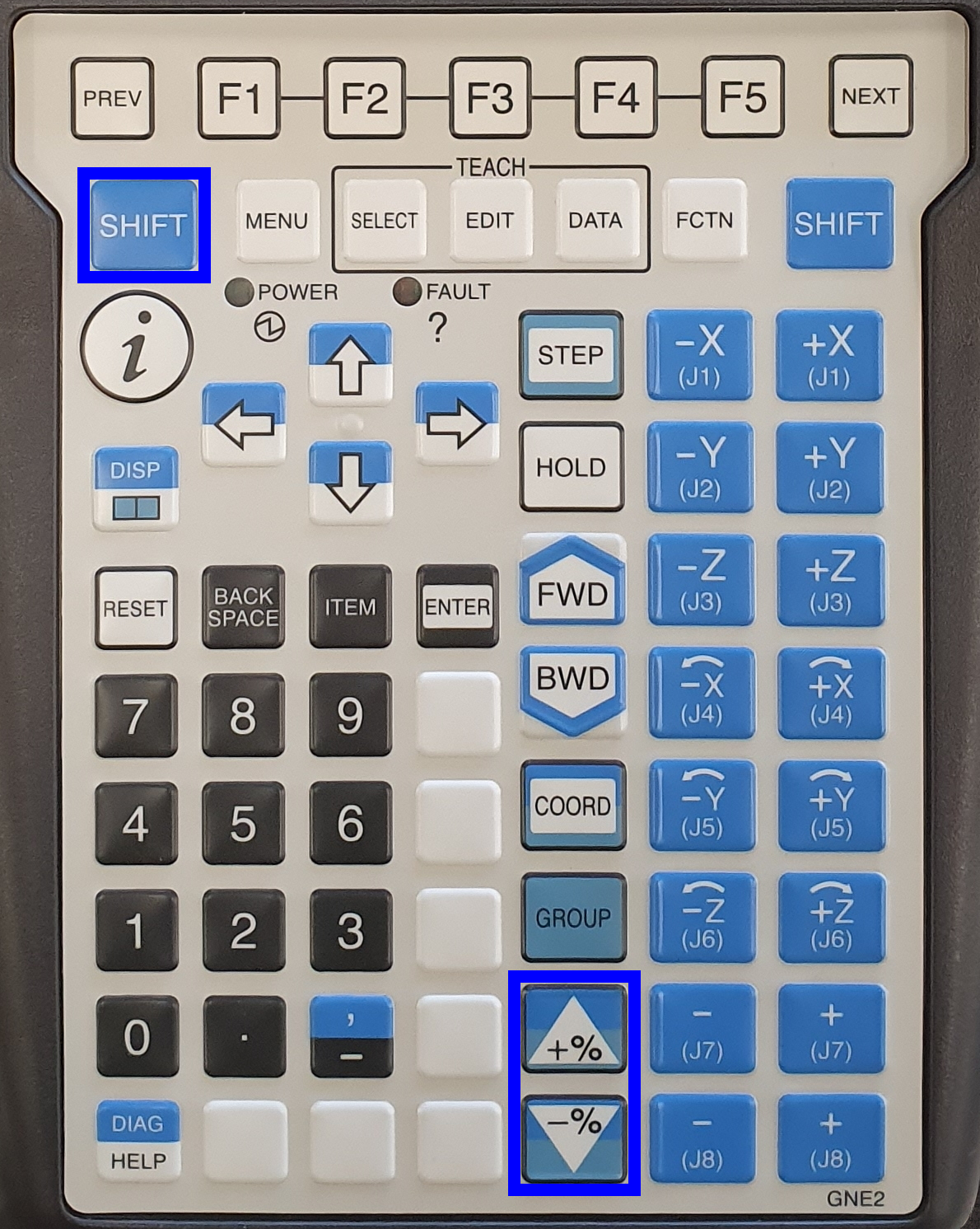
Appuyez sur les touches SHIFT [MAJ.] + +% ou -% pour régler la vitesse.
2.4. Exécution d’un programme de déplacement
Il arrive parfois qu’un programme utilitaire puisse s’utiliser pour amener un robot jusqu’à une position prédéfinie.
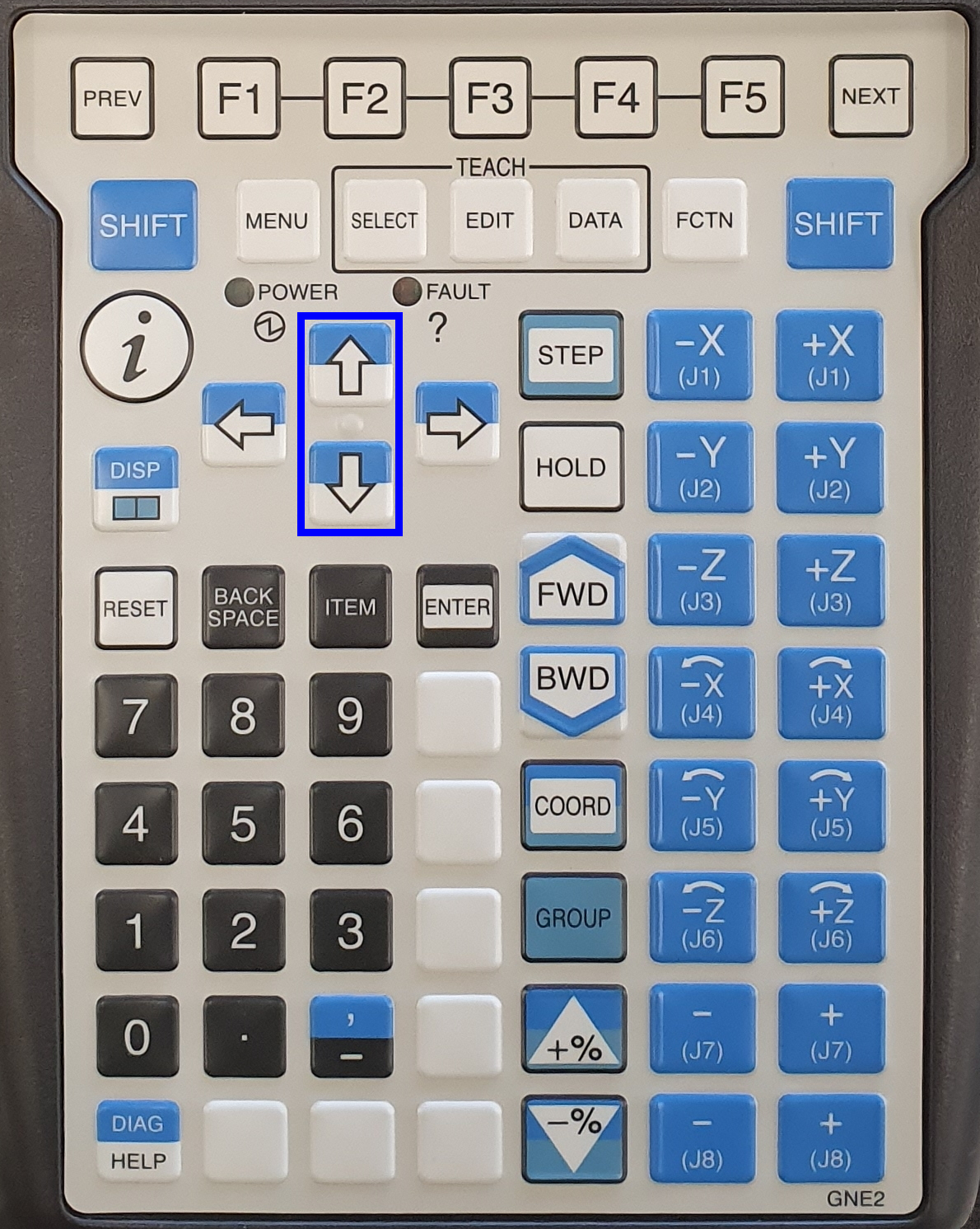
Appuyez sur la touche SELECT pour ouvrir le menu de sélection du programme.Servez-vous des touches UP et DOWN pour sélectionner le programme utilitaire.Maintenez la touche SHIFT [MAJ.] enfoncée pour obtenir un défilement plus rapide.
Après avoir sélectionné le programme utilitaire, appuyez sur la touche ENTER pour ouvrir ce programme.
Après avoir sélectionné l’option A5_MANUALTOHOME, appuyez sur la touche ENTER pour ouvrir ce programme.
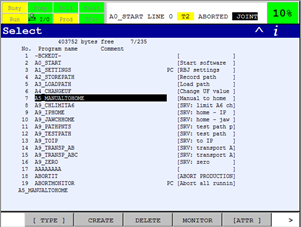
Appuyez sur la touche SHIFT [MAJ.] + FWD pour exécuter ce programme.Le robot exécutera les mouvements enregistrés dans ce programme.Relâchez la touche SHIFT [MAJ.] ou l’interrupteur de sécurité pour en arrêter le déplacement le cas échéant.
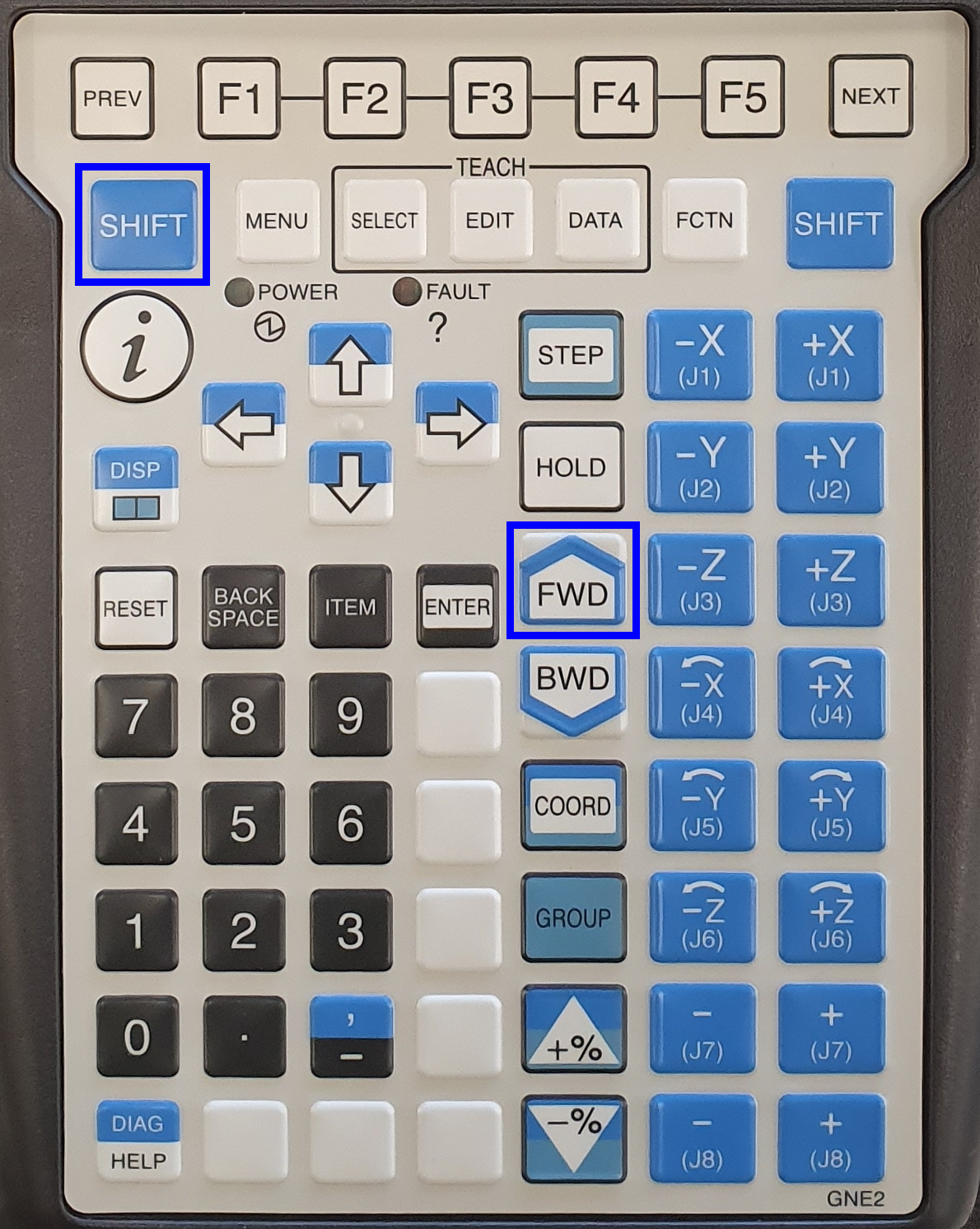
Les indicateurs Busy [Occupé] et Run [Exécution] virent au vert pendant le déplacement.Maintenez la touche SHIFT [MAJ.] et l’un des interrupteurs de sécurité enfoncés jusqu’à ce que le robot ait atteint sa position initiale.
| Remarque |
Veillez à ce que le robot ne heurte aucun obstacle pendant son déplacement.Soyez attentif aux personnes, aux machines environnantes, aux obstacles éventuels et au robot en tant que tel.Veillez à ne pas endommager les câbles montés autour du robot.
Lorsque le robot a achevé le programme entamé, les indicateurs Busy [Occupé] et Run [Exécution] virent à nouveau au jaune et la première ligne du programme est sélectionnée.
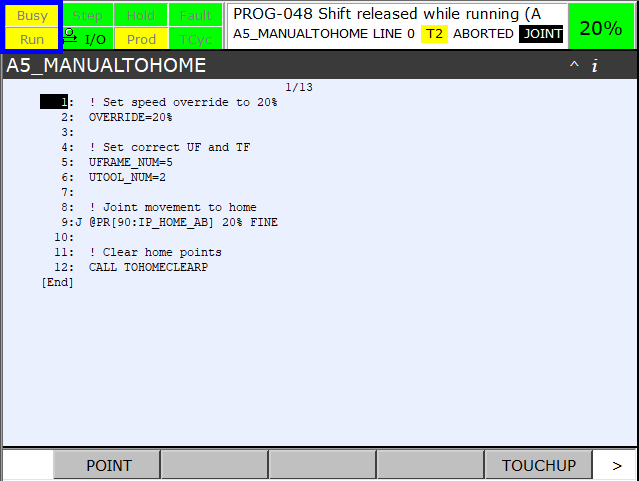
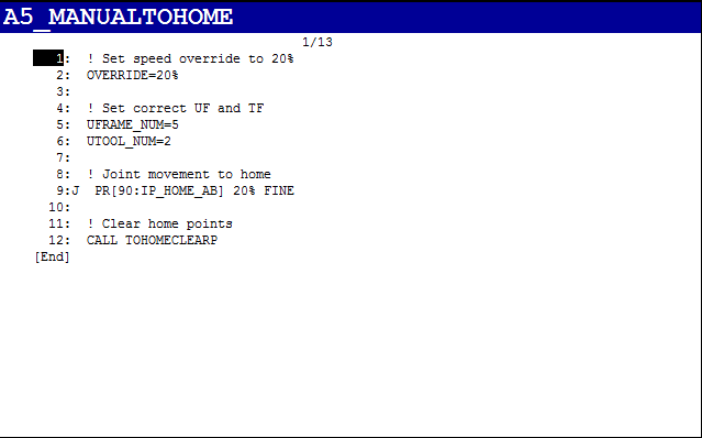
2.4.1. A5_MANUALTOHOME
Le programme A5_MANUALTOHOME s’utilise pour amener le robot jusqu’à la position initiale apprise lors de l’installation.Après avoir procédé à un déplacement manuel du robot, il convient de le ramener à sa position initiale à l’aide de ce programme avant de pouvoir à nouveau en confier le pilotage en mode automatique au logiciel.
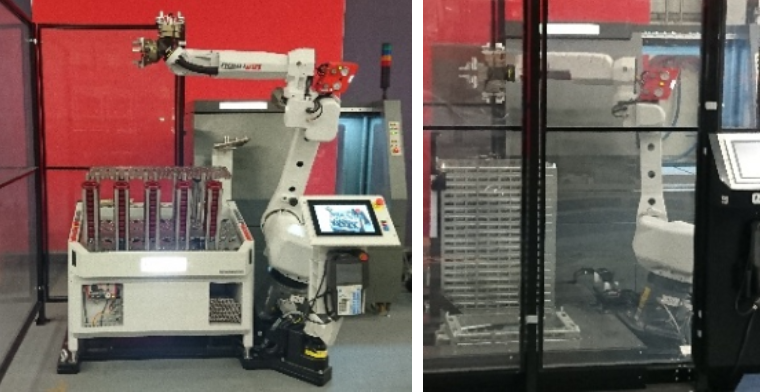
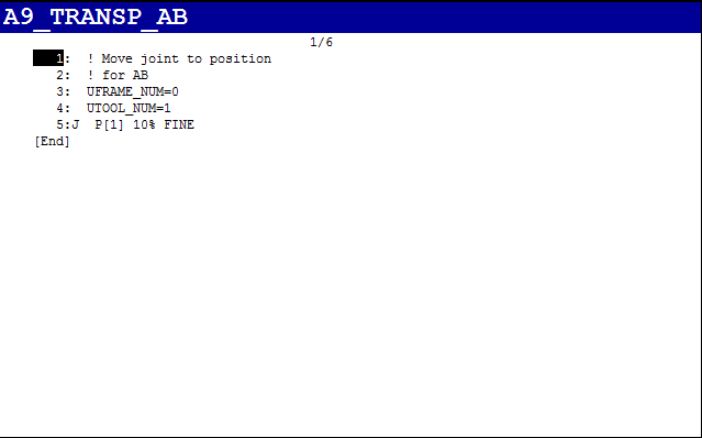
2.4.2. A9_TRANSP_AB
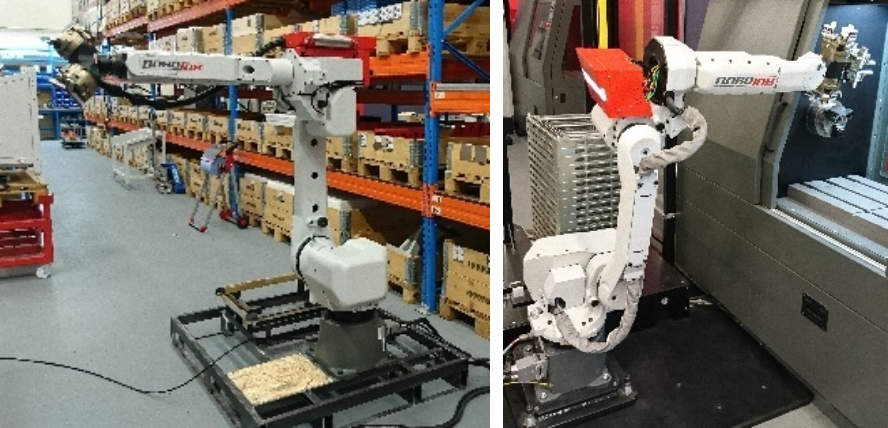
Le programme A9_TRANSP_AB s’utilise pour amener le robot jusqu’à une position propice au transport de robots d’un poids inférieur ou égal à 35 kg.Mettez si possible cette position à contribution en cas de transport du robot sur une palette ou une embase fixe.Cette position est conçue pour un robot équipé de deux têtes de préhension perpendiculaires et respectivement pourvues d’une pince de préhension A et d’une pince de préhension B.Observez l’orientation des pinces de préhension sur les photos ci-après.
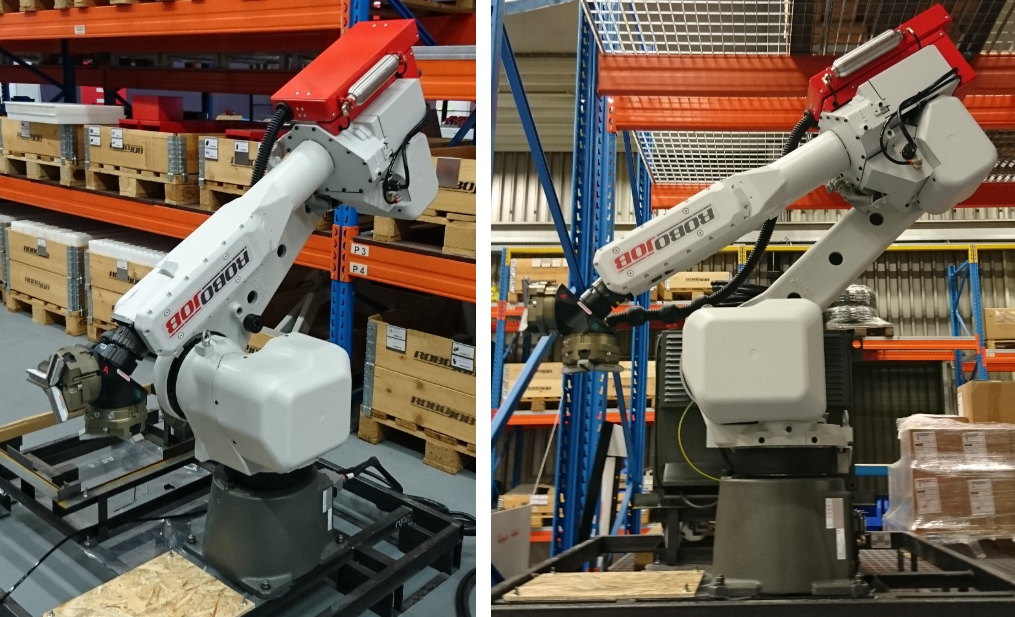
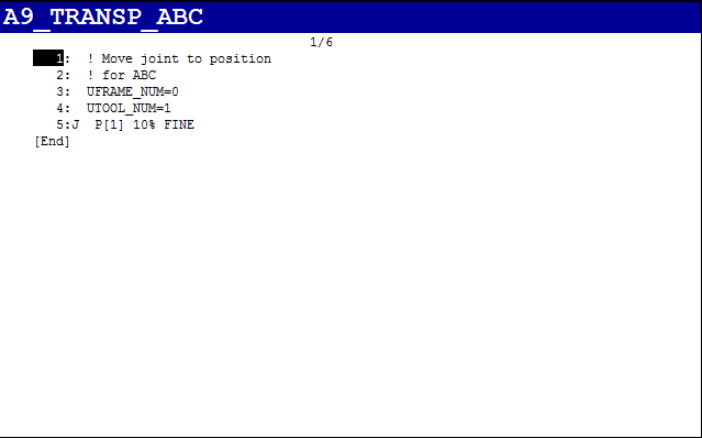
2.4.3. A9_TRANSP_ABC
Le programme A9_TRANSP_ABC s’utilise pour amener le robot jusqu’à une position propice au transport de robots d’un poids inférieur ou égal à 35 kg.Mettez si possible cette position à contribution en cas de transport du robot sur une palette ou une embase fixe.Cette position est conçue pour un robot équipé de têtes de préhension diamétralement opposées et respectivement pourvues d’une pince de préhension A, d’une pince de préhension B et d’une pince de préhension C en option.Observez l’orientation des pinces de préhension sur les photos ci-après.
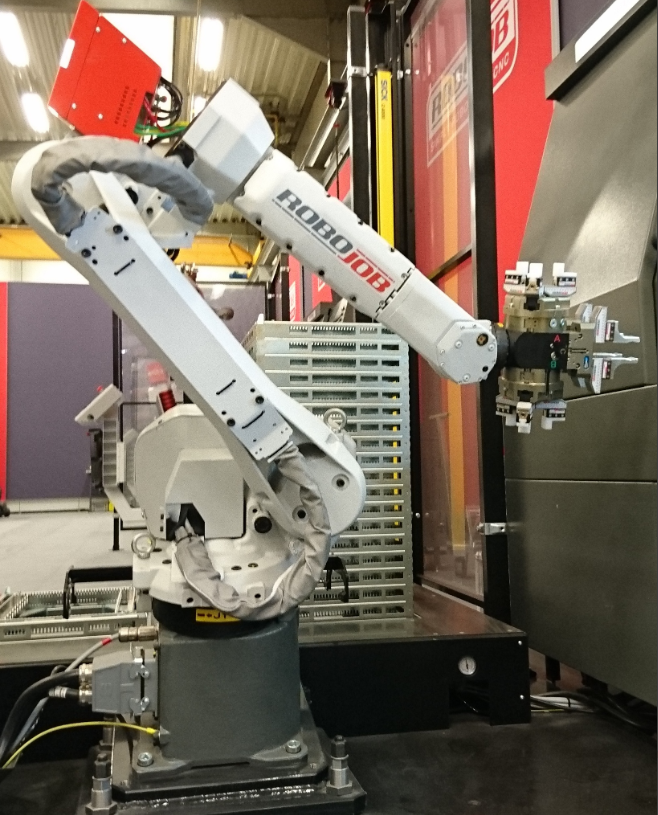
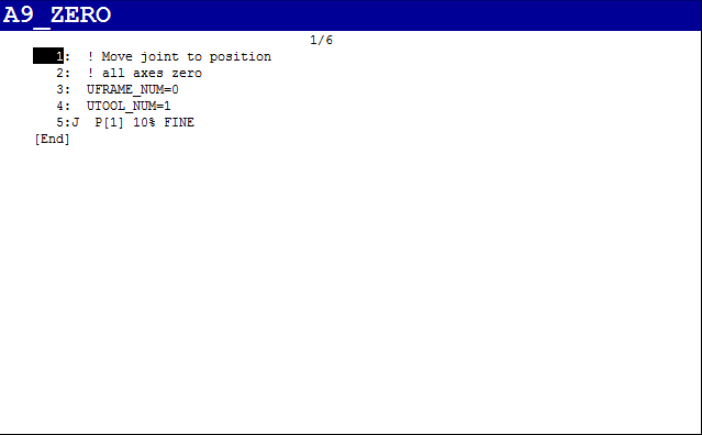
2.4.4. A9_ZERO
Le programme A9_ZERO s’utilise pour amener le robot jusqu’à une position où toutes les coordonnées sont nulles.
2.5. Démontage du robot de son support
Si le robot n ’ est pas installé sur une embase, mais ancré au sol, alors il convient de l’en démonter.
2.5.1. déplacement du robot pour l’amener jusqu’à la position voulue
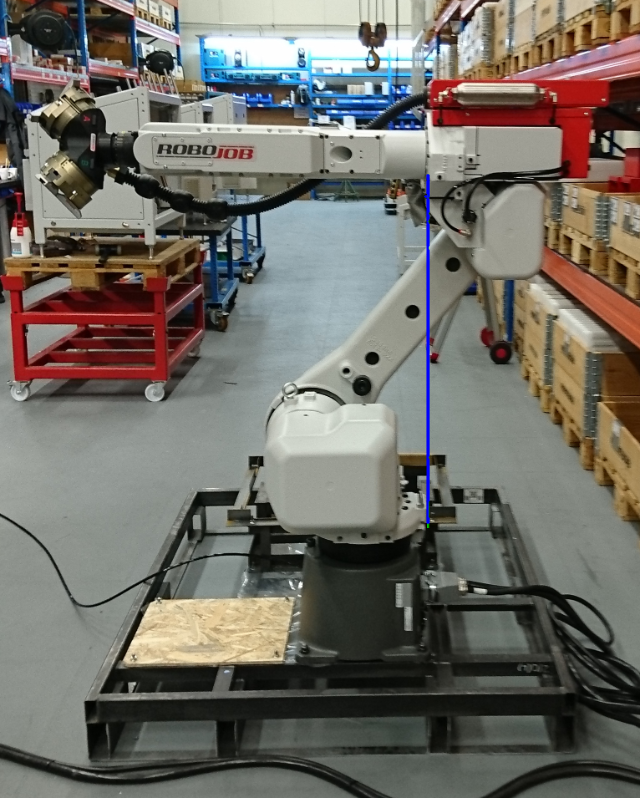
La première étape consiste à déplacer le robot pour l’amener jusqu’à la position d’arrimage des élingues.Dans l’exemple qui nous occupe, nous commençons par la position zéro à l’aide du programme A9_ZERO.L’exécution de ce programme aura pour effet d’amener le robot jusqu’à une position où toutes les coordonnées sont nulles.Le bras du robot sera orienté à l’horizontale.

Déplacez l’articulation J2 jusqu’à ce que le robot soit dans la position indiquée sur l’illustration ci-après.L’avant de la troisième articulation se situera dans le même plan que l’arrière de la première articulation comme indiqué par la ligne verte.
| Remarque |
S’il s’avère parfois impossible d’atteindre la position zéro, rien ne s’oppose au déplacement manuel du robot jusqu’à une position propice à l’arrimage d’élingues.
2.5.2. arrimage d’élingues
Arrimez les élingues aux boulons à œil de levage.

L’élingue passe entre les axes 2 et 4.

Pour prévenir tout basculement du robot lors de son levage, il convient d’utiliser une sangle supplémentaire pour arrimer l’élingue à l’axe 4.

2.5.3. déconnexion des câbles et de l’alimentation en air
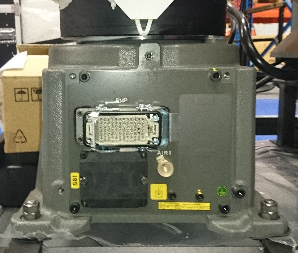
Avant de soulever le robot, veillez à débrancher le câble raccordé à l’unité de commande, l’alimentation en air et le câble de mise à la terre.Débranchez tout câble supplémentaire raccordé au robot par le biais de son embase.Abstenez-vous de retirer les accus logés dans le robot et de déconnecter les câbles raccordés au bras du robot.Les accus continueront à assurer l’alimentation des codeurs montés sur les moteurs pour que le robot se souvienne de sa position.
2.5.4. soulèvement du robot posé sur son support
Démontez les écrous vissés sur les boulons que présente le support du robot.Dégagez prudemment le robot de son support.Boulonnez le robot sur une palette en vue de son transport.

2.6. Préparation du robot en vue de son transport
Si le robot est monté sur une embase, l’installation complète est susceptible d’être déplacée sans devoir séparer le robot de son support.Si le robot n’est pas monté sur une embase, il convient de le boulonner sur une palette en vue de son transport.

Dans ces deux cas de figure, il y a lieu d’amener le robot jusqu’à sa position de transport.En cas de déconnexion préalable du câble raccordé à l’unité de commande, il convient de le reconnecter de manière à pouvoir déplacer le robot.Servez-vous des programmes A9_TRANSP_AB ou A9_TRANSP_ABC, en fonction de la nature des pinces de préhension pour amener le robot jusqu’à sa position de transport.Si le programme est inutilisable ou la position inatteignable, procédez au déplacement manuel du robot pour l’amener à une position analogue, propice à son transport en toute sécurité.
Enveloppez le robot dans des feuilles en matière synthétique et en plastique bullé pour le protéger durant son transport.

| Remarque |
Abstenez-vous de démonter d’autres éléments du robot. Abstenez-vous de retirer les accus du robot. Abstenez-vous de déconnecter les moteurs ou les codeurs du robot.
| Remarque |
Servez-vous exclusivement de l’unité de commande pour déplacer le robot. Abstenez-vous de toute tentative de déplacement manuel du robot.
3. Comment obtenir de l’aide supplémentaire
N’hésitez pas à nous contacter lorsque vous avez besoin d’une assistance supplémentaire au-delà des documents fournis dans la base de connaissances du service RoboJob.
Vous pouvez contacter le service RoboJob Service en utilisant les moyens suivants:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Téléphone: +32 15 70 89 70
Nous vous prions de bien vouloir nous fournir les informations suivantes:
-
Numèro de sèrie xx-xx-xxx
-
Description de l’erreur ou de la piëce dèfectueuse
-
Message ou code d’erreur exact
-
Qu’a fait le robot
-
Qu’Ètait-il supposè faire
-
Photos ou vidèos
Vous pouvez nous envoyer ces informations par e-mail.Pour envoyer des fichiers volumineux, vous pouvez utiliser un service de transfert de fichiers comme WeTransfer: robojob.wetransfer.com.
Une confirmation automatique vous sera envoyée dès réception de votre courrier.