Déconnexion du câble de la pince et désactivation des capteurs
|
Les capteurs dont la pince de préhension est équipée ne fonctionnent plus et il convient de débrancher le câble de raccordement à la pince de préhension pour prévenir tout risque de court-circuit au sein du robot.En outre, certains réglages s’imposent pour procéder à une désactivation logicielle des capteurs. |
1. Servez-vous des outils suivants
|
|
|


2. Procédure
2.1. Déconnexion du câble
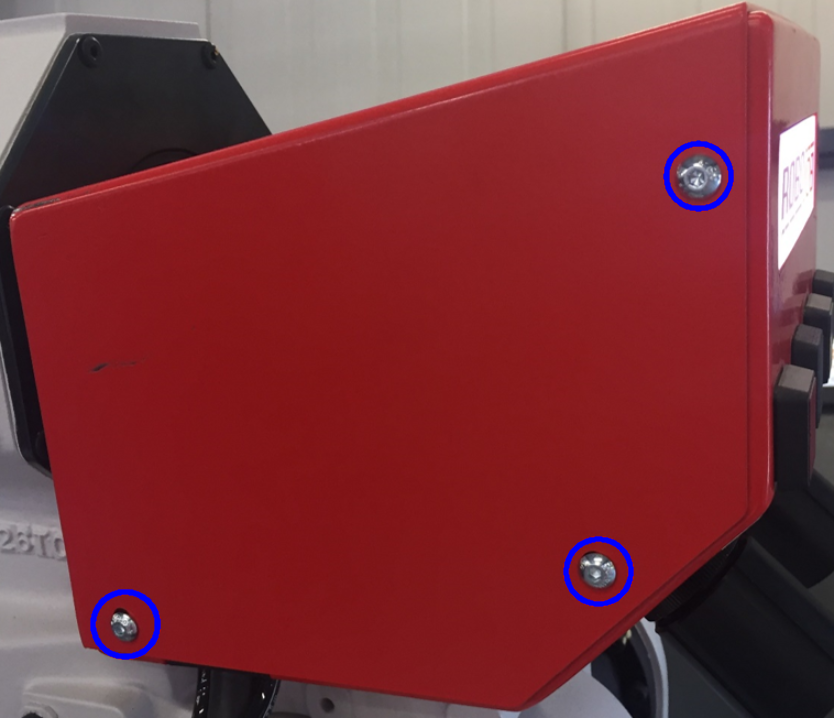
2.1.1. Dépose du couvercle du coffret pneumatique
Pour accéder au câble de la pince de préhension, il convient de déposer le couvercle du coffret pneumatique.Pour ce faire, dévissez les boulons de fixation montés des deux côtés du coffret pneumatique.
2.1.2. Débranchement du câble
La dépose du couvercle permet d’accéder aux cartes de circuit imprimé.La fiche du câble de la pince de préhension se situe dans le coin supérieur gauche à l’intérieur du coffret pneumatique.Cette fiche porte la mention Gripper [pince de préhension].
Sur les anciennes versions, les six conducteurs sont de même couleur, mais ils sont numérotés.Les numéros visibles à gauche correspondent à la fiche, les numéros visibles à droite correspondent au câble.Sur les versions plus récentes, les conducteurs sont assortis de codes couleur.Les numéros visibles à gauche correspondent à la fiche, les couleurs sont indiquées au-dessus des conducteurs tirés.
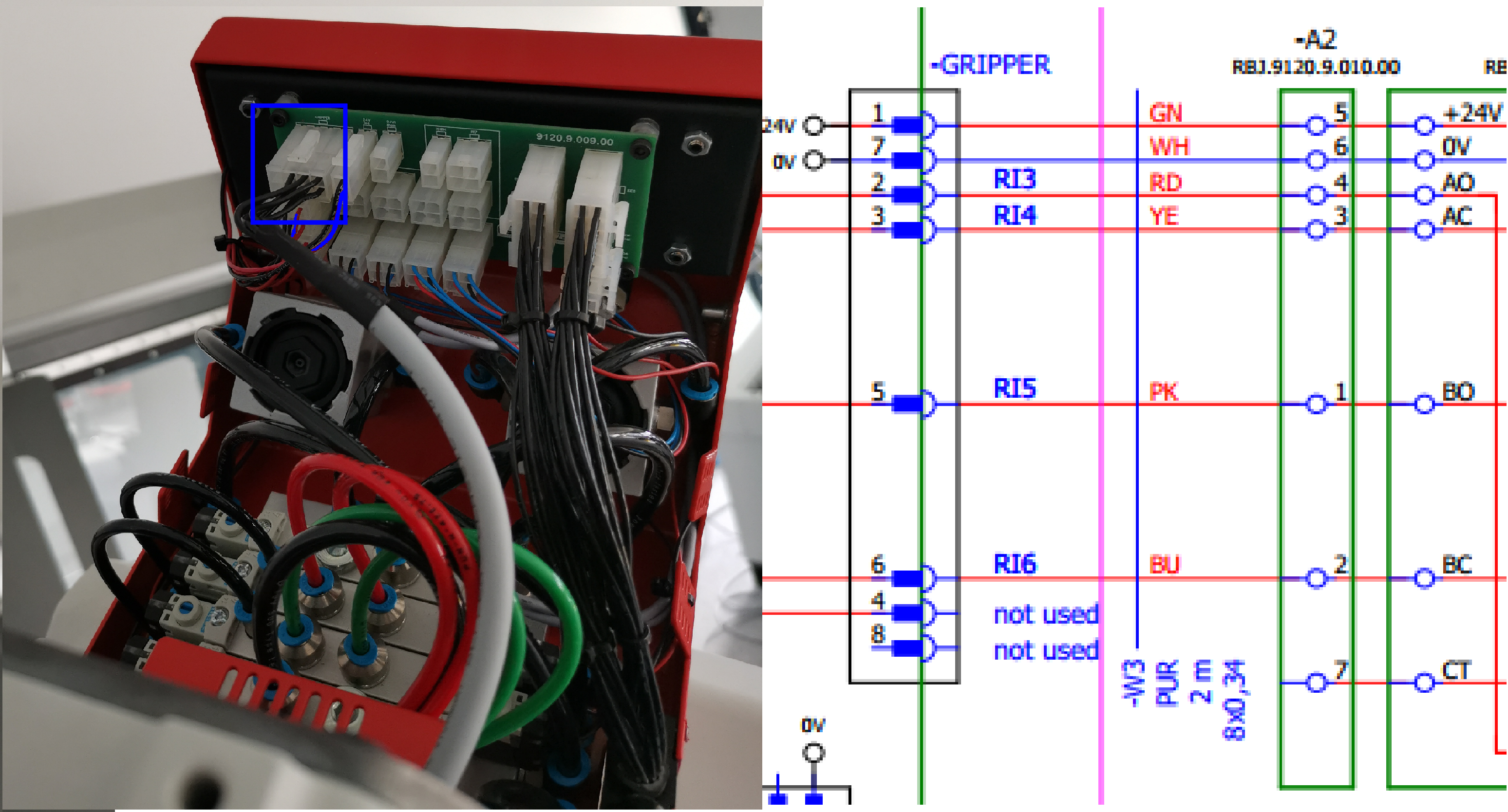
À présent, rien ne s’oppose à la déconnexion du câble de la pince de préhension raccordé à la carte de circuit imprimé.

2.1.3. Remontage du couvercle du coffret pneumatique
Après avoir débranché le câble, vous pouvez remonter le couvercle du coffret pneumatique.Pour ce faire, revissez correctement les boulons de fixation.
2.2. Désactivation logicielle des capteurs
-
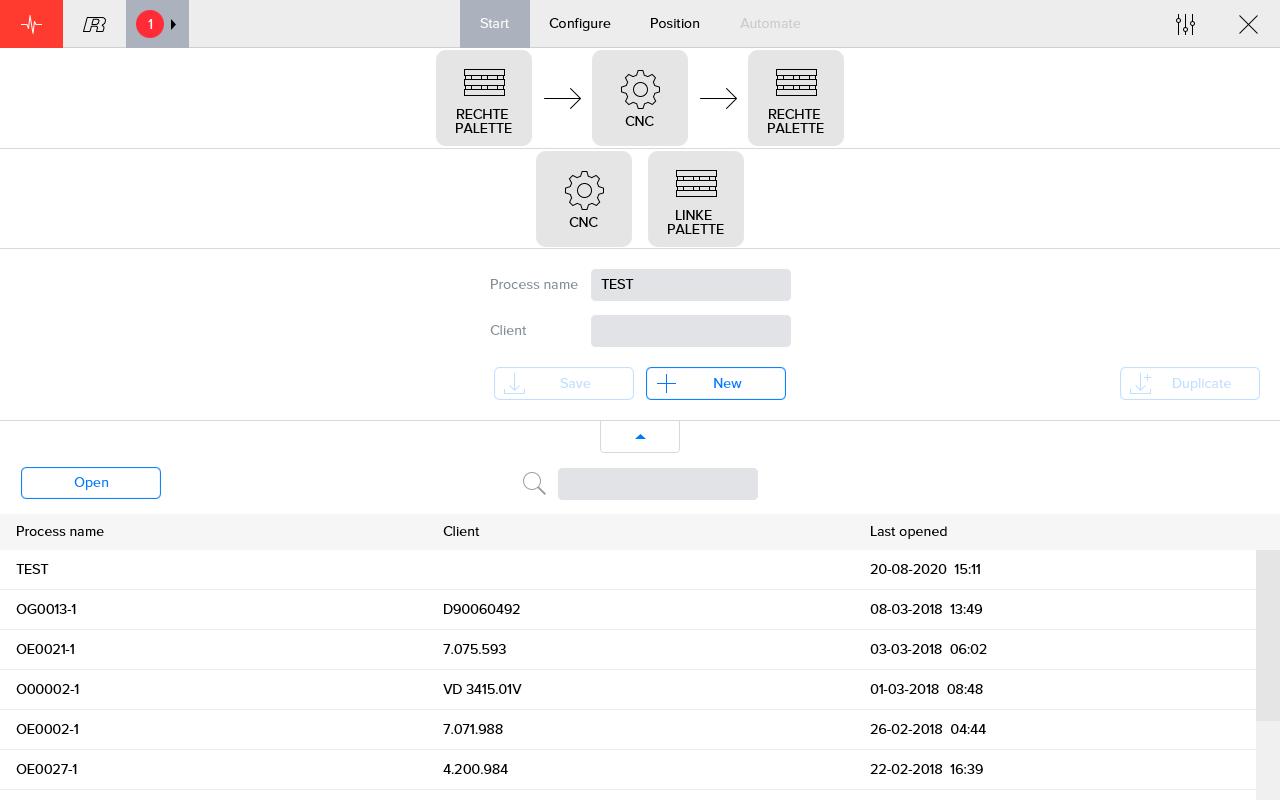
Ouvrez le logiciel Multi-Assist.
-
Ouvrez le menu Paramétrage (Settings) en appuyant sur le bouton Paramétrage (Settings) dans le coin supérieur droit.
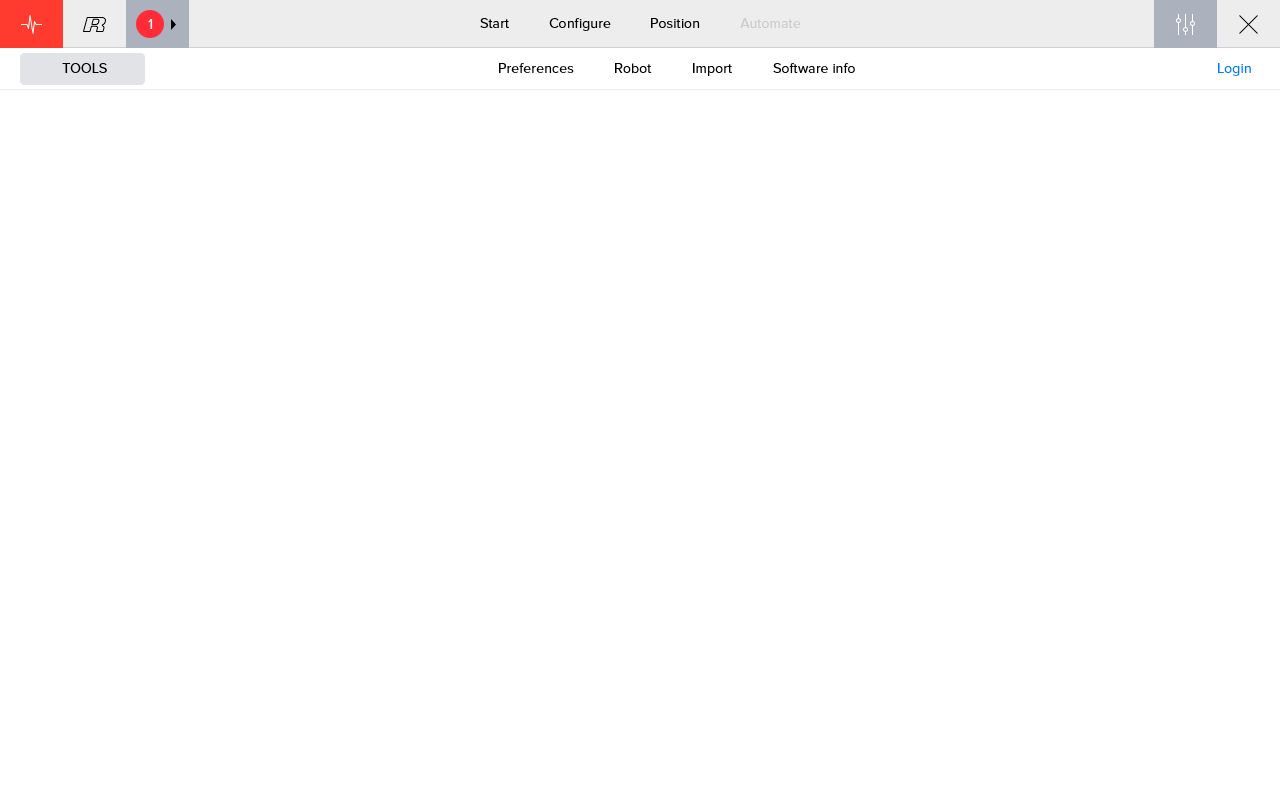
-
Ouvrez le menu Préférences.
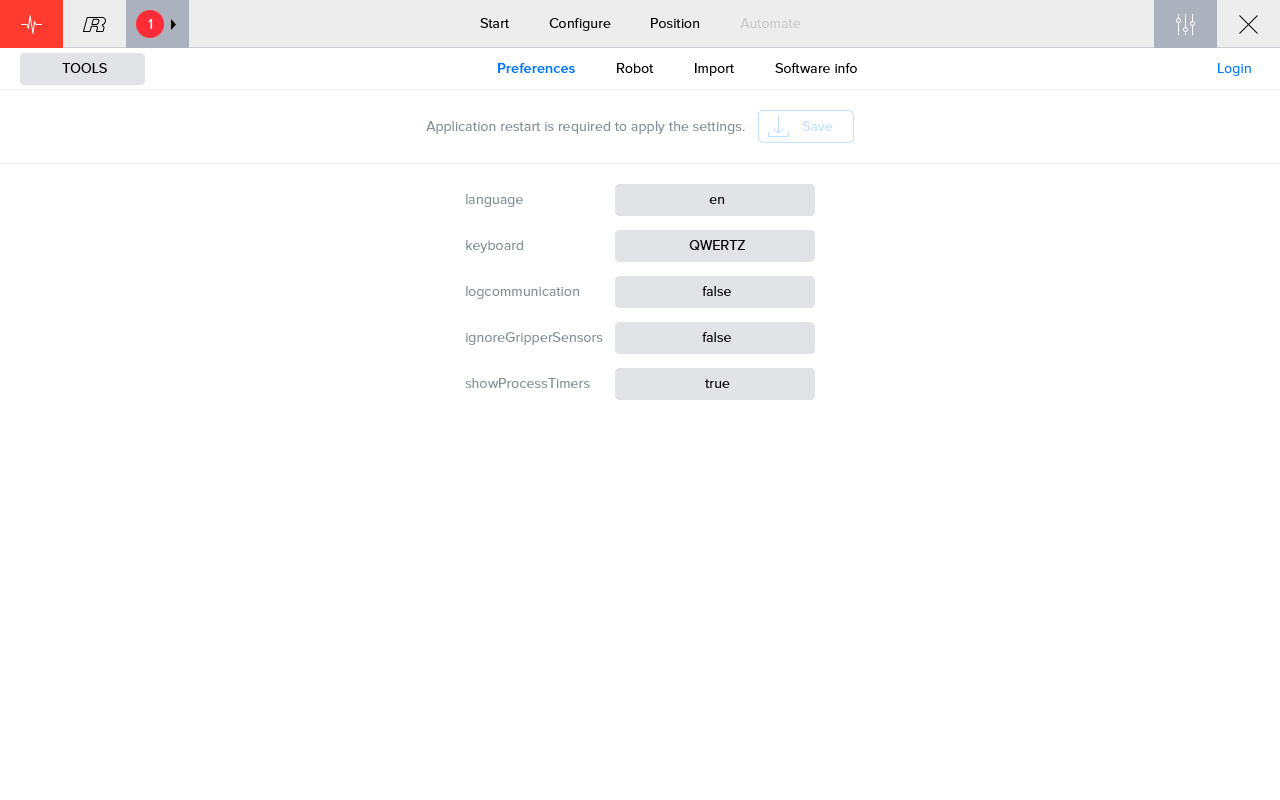
-
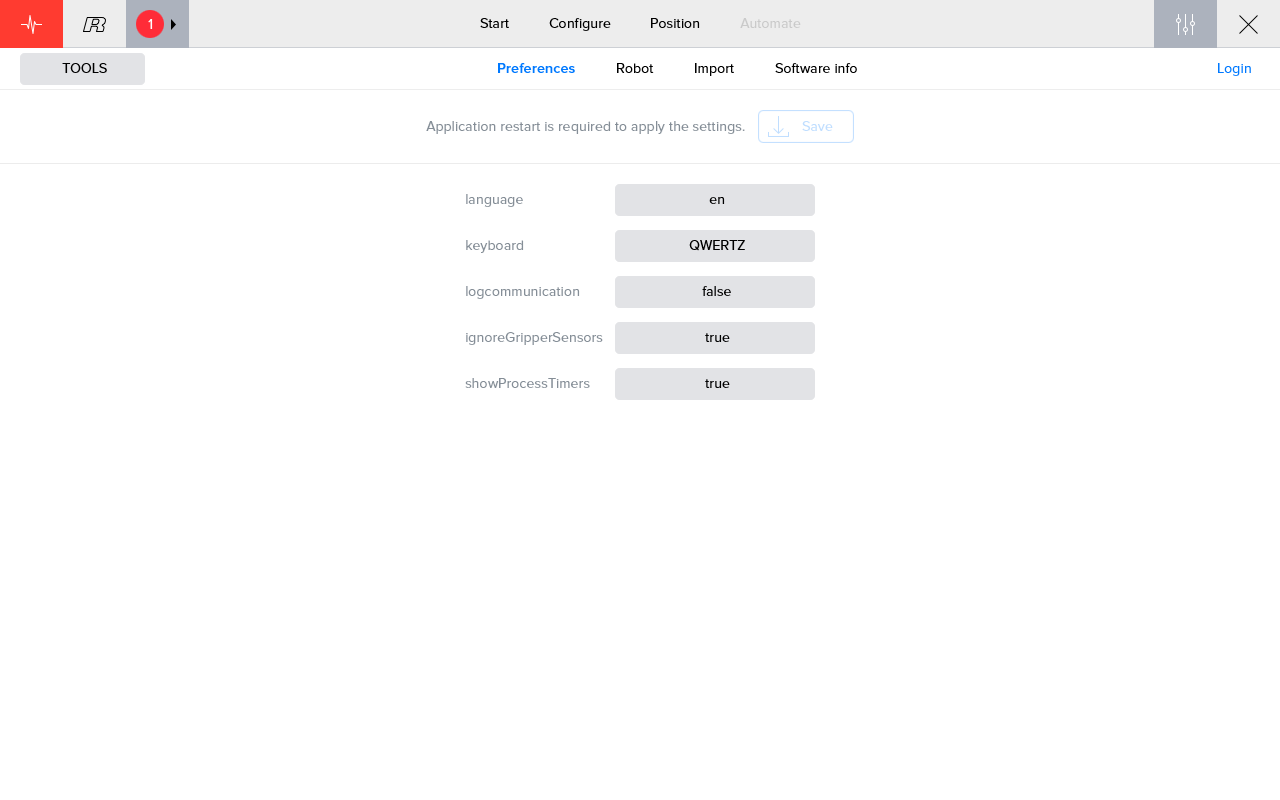
Modifiez le paramètre IgnoreGripperSensor [IgnorerCapteurPince de préhension] pour lui conférer la valeur True [Vrai].
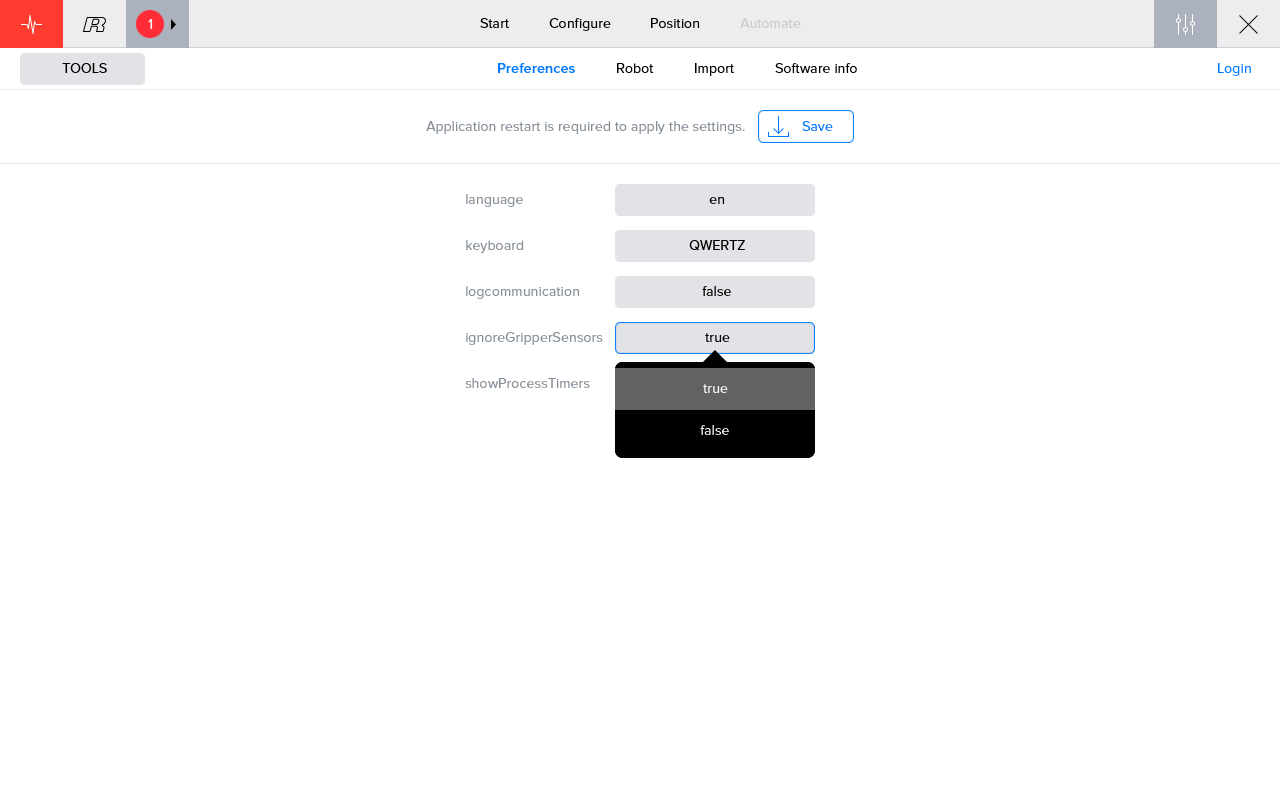
-
Cliquez sur le bouton Save [Enregistrer] au centre de l’écran, pour enregistrer les modifications apportées.
3. Comment obtenir de l’aide supplémentaire
N’hésitez pas à nous contacter lorsque vous avez besoin d’une assistance supplémentaire au-delà des documents fournis dans la base de connaissances du service RoboJob.
Vous pouvez contacter le service RoboJob Service en utilisant les moyens suivants:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Téléphone: +32 15 70 89 70
Nous vous prions de bien vouloir nous fournir les informations suivantes:
-
Numèro de sèrie xx-xx-xxx
-
Description de l’erreur ou de la piëce dèfectueuse
-
Message ou code d’erreur exact
-
Qu’a fait le robot
-
Qu’Ètait-il supposè faire
-
Photos ou vidèos
Vous pouvez nous envoyer ces informations par e-mail.Pour envoyer des fichiers volumineux, vous pouvez utiliser un service de transfert de fichiers comme WeTransfer: robojob.wetransfer.com.
Une confirmation automatique vous sera envoyée dès réception de votre courrier.