Calibrage du capteur intégré à l’armoire (SRVO-406 DCS SSO SVOFF input 1,1)
|
Si le robot émet l’alarme active SRVO-406 DCS SSO SVOFF input 1,1.Il convient de vérifier le panneau latéral pour s’assurer que la porte est correctement fermée. Si c’est le cas, il y a lieu de calibrer le capteur monté dans l’armoire électrique. |
1. Servez-vous des outils suivants
|
|
|
|



2. Procédure
2.1. Ouverture de l’état d’E/S sans risque
-
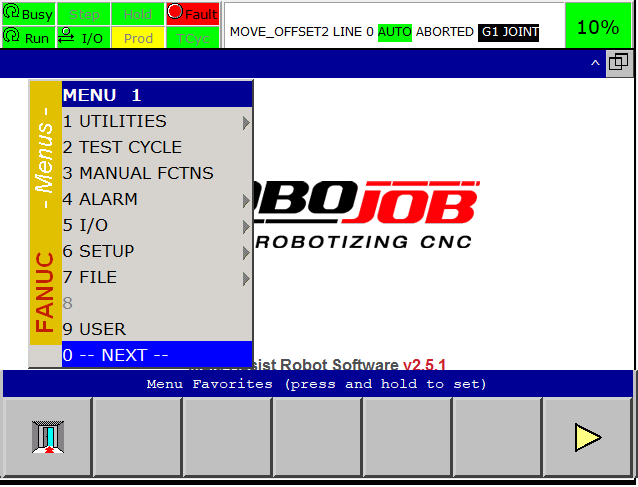
Appuyez sur le bouton MENU et sélectionnez l’option 0 NEXT.
-
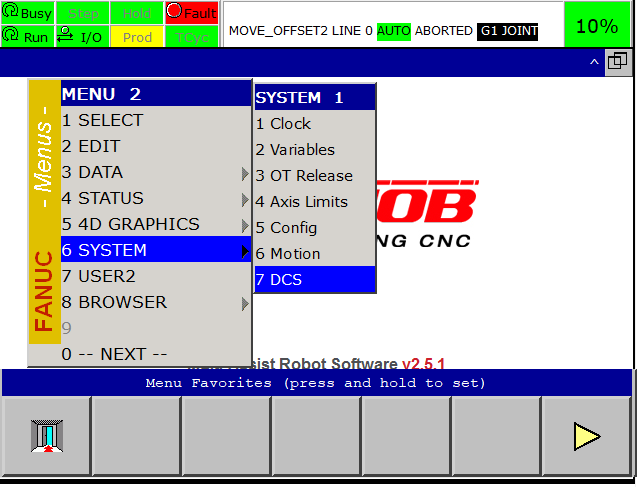
Sélectionnez successivement les options 6 SYSTEM puis 7 DCS.
-
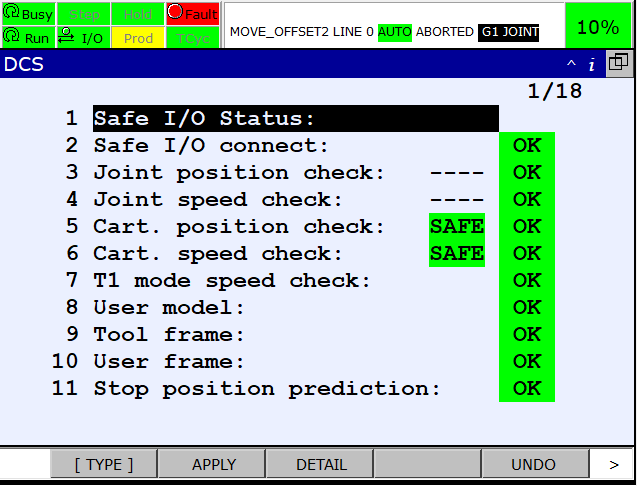
Sélectionnez l’option 1 État d’E/S sans risque, ensuite appuyez sur le bouton DETAIL.
-
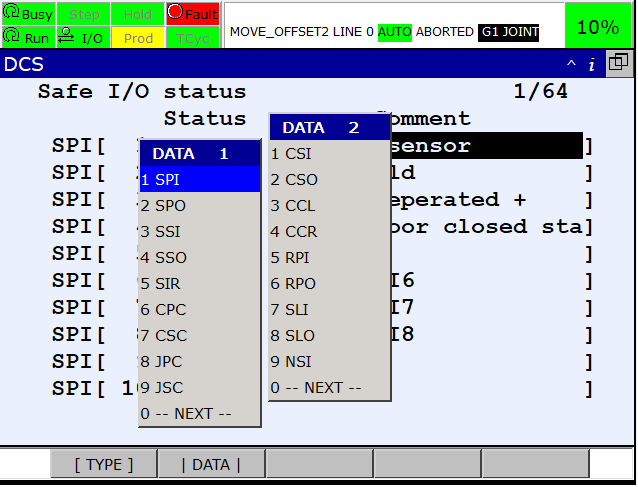
Assurez-vous que l’onglet SPI est ouvert.
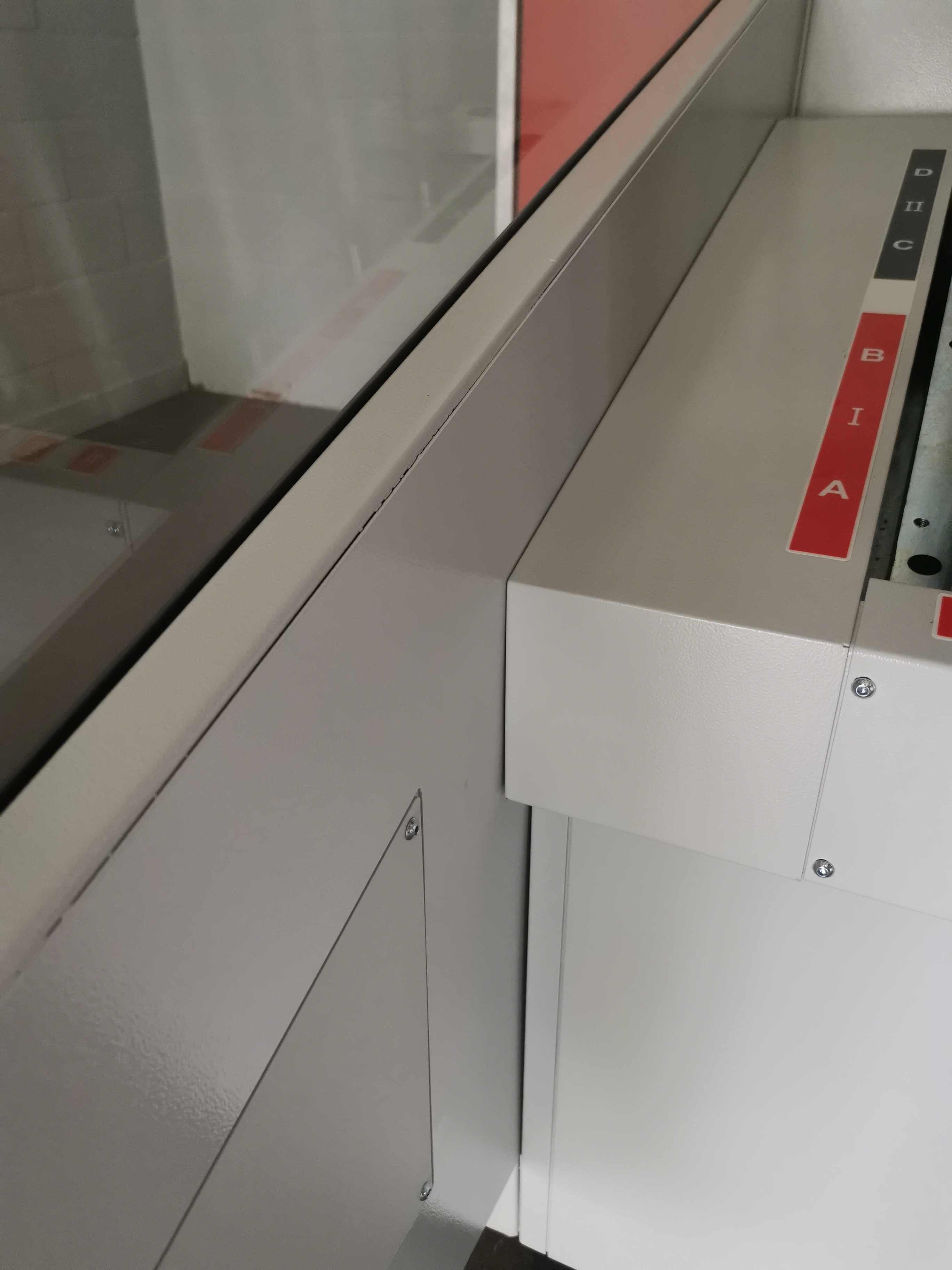
2.2. Vérification du panneau latéral
-
Assurez-vous de la fermeture correcte du panneau latéral (si ce n’est pas le cas, fermez la porte).

-
Pour fermer la porte, exercez, sur le panneau latéral, une traction en direction de l’empileur.
-
Lorsque le panneau latéral est fermé, servez-vous d’une clé Allen pour verrouiller la porte.Le boulon à serrer se situe sous la face supérieure de la table de l’empileur.
-
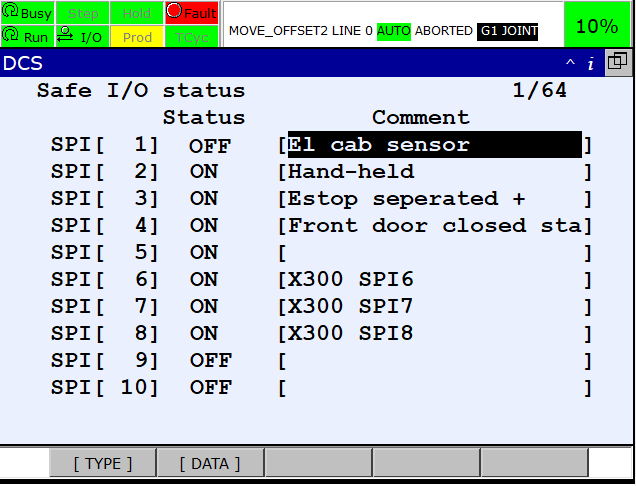
Si la porte est correctement fermée, l’état du paramètre SPI[1] devrait prendre la valeur ON.Si ce n’est pas le cas, (état OFF), il convient de calibrer le capteur monté dans l’armoire électrique.
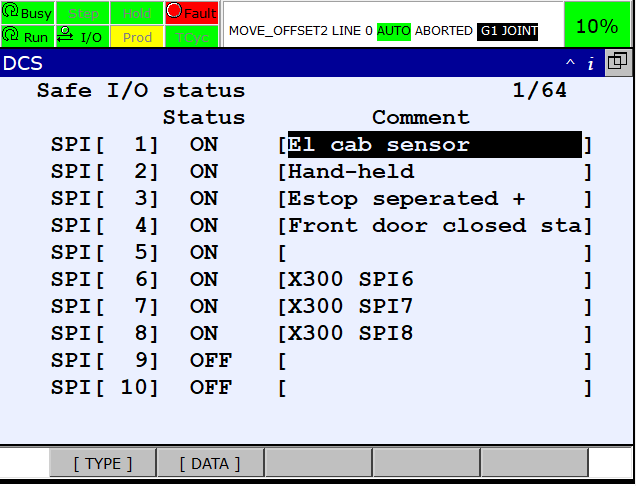
Si l’état du paramètre SPI[1] est ON, il convient d’effectuer divers essais pour vérifier si le capteur est correctement calibré.
2.3. Calibrage du capteur
2.3.1. Paramètre SPI[1] OFF
Si l’état du paramètre SPI[1] est OFF, il y a lieu de calibrer le capteur.Pour ce faire, effectuez les opérations de la procédure ci-après.
-
Rouvrez la porte en desserrant le boulon, puis en exerçant une traction sur le panneau latéral.
-
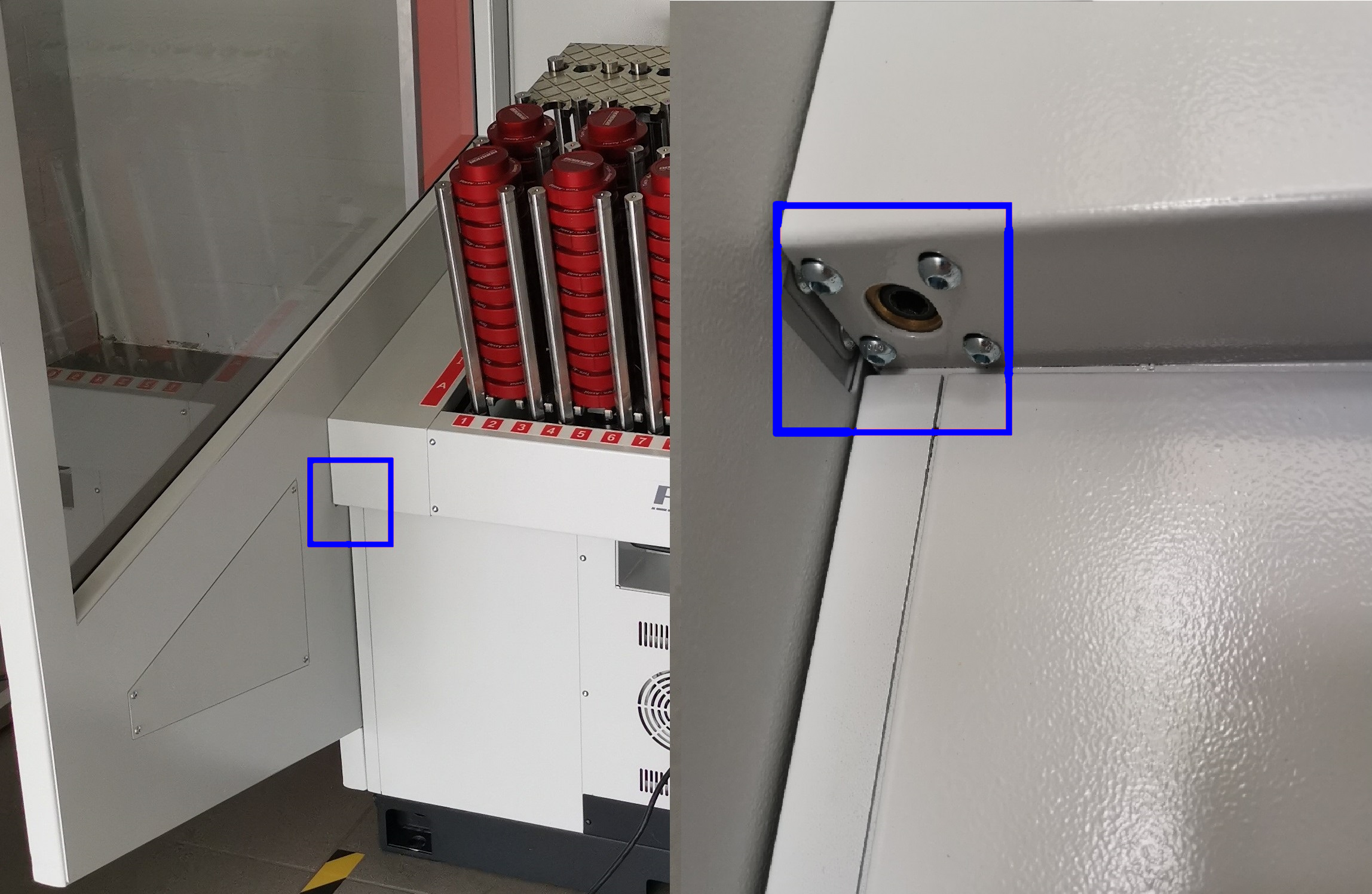
Rapprochez le capteur de l’extérieur.Pour ce faire, desserrez les deux écrous (montés respectivement devant et derrière la plaque métallique), puis déplacez le capteur avant de resserrer ces écrous.
:Stacker_locationBolt.png[align='center', width=300]
-
Refermez la porte, puis assurez-vous que le panneau latéral ne heurte pas le capteur lors de sa fermeture.Si c’est le cas, déplacez légèrement le capteur vers l’intérieur.
-
Si la porte est fermée et verrouillée, vérifiez à nouveau l’état du paramètre.Si l’état du paramètre est encore OFF, ramenez à nouveau le capteur vers l’extérieur.Si l’état du paramètre est ON, il y a lieu d’effectuer divers essais pour vérifier si le capteur est correctement calibré.
2.3.2. Paramètre SPI[1] ON
Si l’état du paramètre SPI[1] est ON, il y a lieu d’effectuer divers essais pour vérifier si le capteur est correctement calibré.
-
Exercez une pression contre le bord du panneau latéral et vérifiez si l’état du paramètre SPI[1] demeure ON.Si ce n’est pas le cas, il convient de ramener le capteur vers l’intérieur parce que le panneau latéral s’en rapproche trop.

-
Exercez une traction contre le bord du panneau latéral et vérifiez si l’état du paramètre demeure ON.Si ce n’est pas le cas, il convient de ramener le capteur vers l’extérieur parce que le panneau latéral en est trop éloigné.

|
S’il s’avère, à l’issue des essais effectués, qu’un déplacement du capteur s’impose, il convient d’en réitérer l’exécution jusqu’à ce que le capteur ne nécessite plus aucun déplacement. |
3. Comment obtenir de l’aide supplémentaire
N’hésitez pas à nous contacter lorsque vous avez besoin d’une assistance supplémentaire au-delà des documents fournis dans la base de connaissances du service RoboJob.
Vous pouvez contacter le service RoboJob Service en utilisant les moyens suivants:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Téléphone: +32 15 70 89 70
Nous vous prions de bien vouloir nous fournir les informations suivantes:
-
Numèro de sèrie xx-xx-xxx
-
Description de l’erreur ou de la piëce dèfectueuse
-
Message ou code d’erreur exact
-
Qu’a fait le robot
-
Qu’Ètait-il supposè faire
-
Photos ou vidèos
Vous pouvez nous envoyer ces informations par e-mail.Pour envoyer des fichiers volumineux, vous pouvez utiliser un service de transfert de fichiers comme WeTransfer: robojob.wetransfer.com.
Une confirmation automatique vous sera envoyée dès réception de votre courrier.