Régler les capteurs des pinces de préhension
|
Il est nécessaire de procéder au réglage des capteurs car la détection des pièces à usiner des pinces de préhension du robot ne fonctionne pas correctement.Suivez la procédure pour configurer les pinces de préhension. |
1. Servez-vous des outils suivants
|
|
|


2. Procédure
2.1. Vérification des capteurs utilisés afin de détecter les pinces de préhension ouvertes et fermées
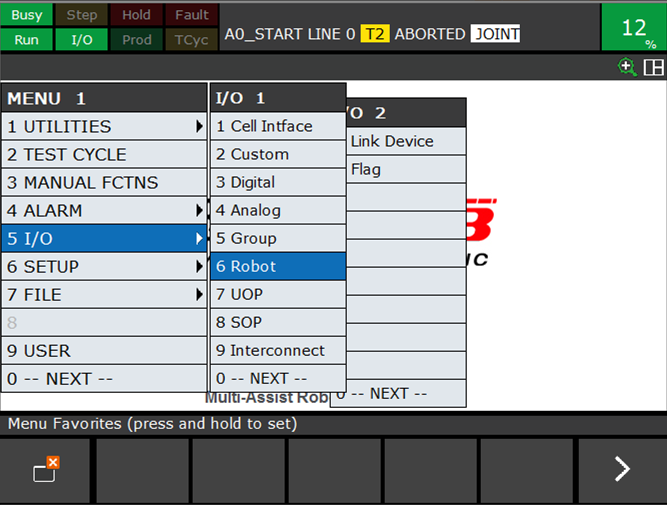
Ouvrez l’écran de saisie du robot sur le Teach Pendant en cliquant sur Menu, sélectionnez 5 I/O (E/S), accédez à 6 Robot et appuyez sur ENTER (ENTRÉE).
Naviguez jusqu’aux signaux d’entrée du robot en cliquant sur F3 IN/OUT (ENTRÉE/SORTIE).
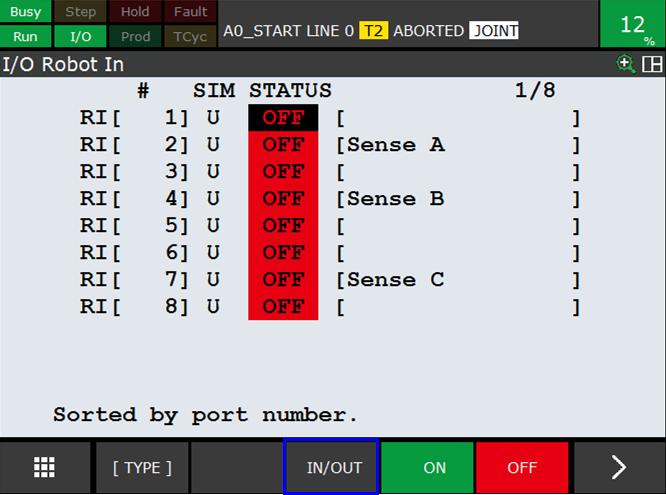
Présentez une pièce métallique devant le capteur et vérifiez sur le Teach Pendant le signal qui est activé.Vous pouvez ainsi identifier le capteur utilisé pour détecter la pince de préhension ouverte et celui utilisé pour détecter la pince de préhension fermée.Il vous est également possible de vérifier, de cette manière, si le capteur fonctionne correctement et envoie un signal au robot.

2.2. Paramétrage des capteurs utilisés pour détecter l’ouverture de la pince de préhension
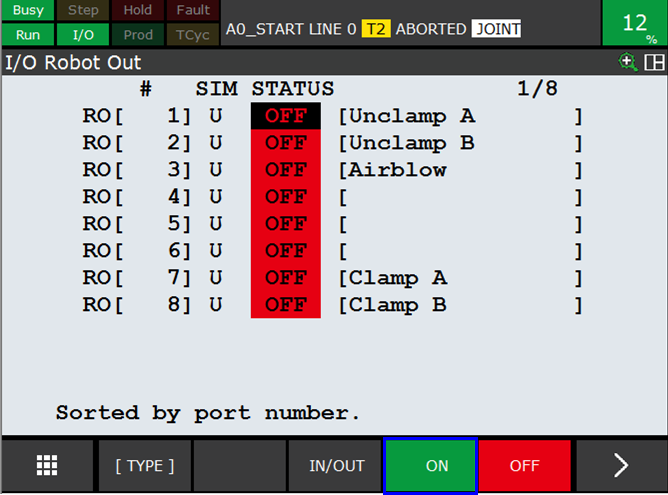
Ouvrez les pinces de préhension.Modifiez l’écran du Teach Pendant en « I/O Robot Out » (E/S Robot Sortie) en cliquant sur F3 IN/OUT (ENTRÉE/SORTIE).Ensuite ouvrez la pince de préhension en cliquant sur F4 ON (ACTIVER).Modifiez les sorties de manière à ce que les pinces de préhension puissent s’ouvrir.
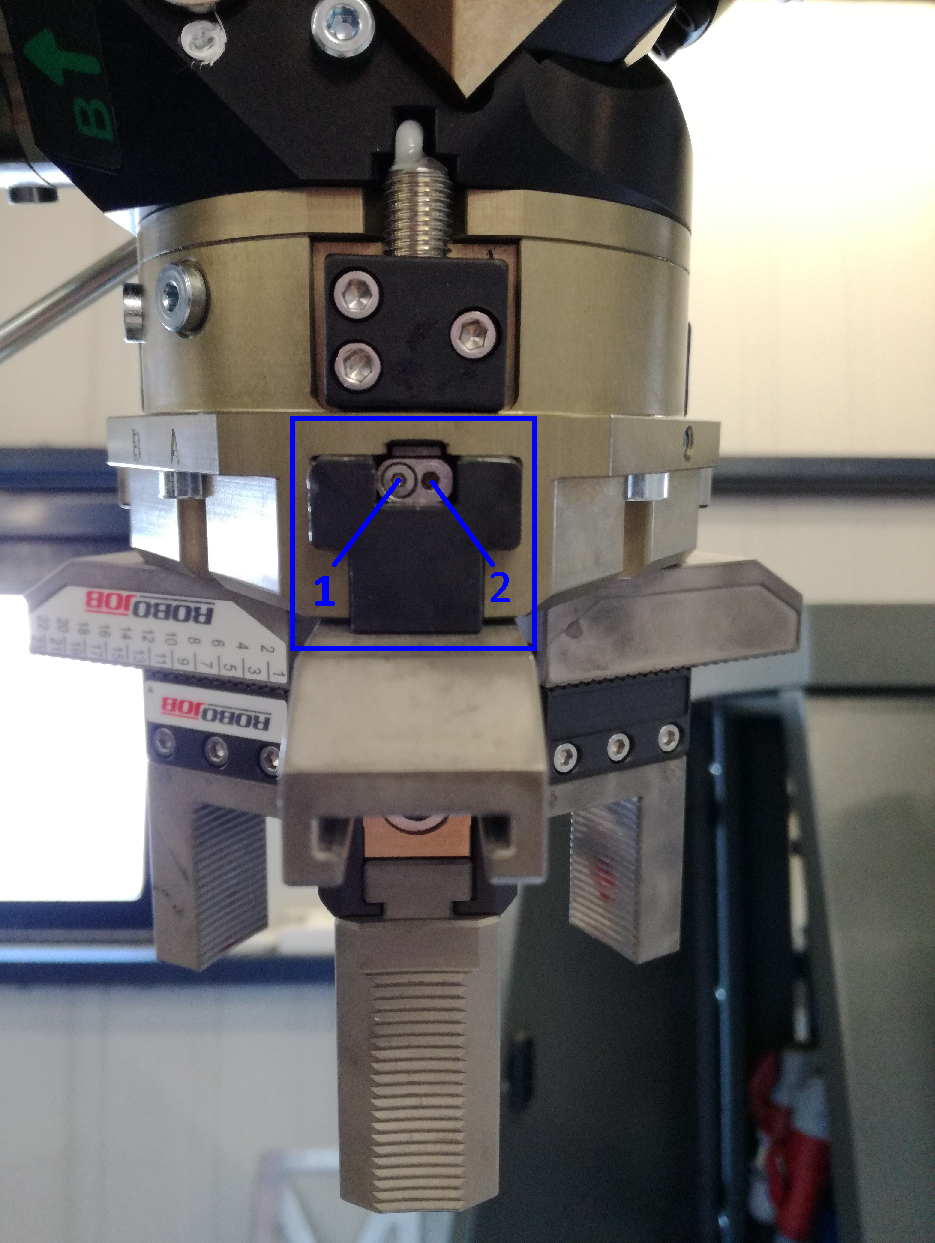
Desserrez d’abord la vis gauche (1) puis vissez la plaque de détection de métal de l’intérieur vers l’extérieur (2), de sorte que vous vissiez d’abord complètement la plaque de détection.Revissez lentement la plaque vers l’extérieur jusqu’à l’extinction de l’information signalée au moyen de la diode LED.Le capteur est configuré dès l’extinction de l’information signalée au moyen de la diode LED.Verrouillez la plaque de détection dans cette position.
|
Veillez à ne pas visser la plaque de détection plus vers l’extérieur que nécessaire. |
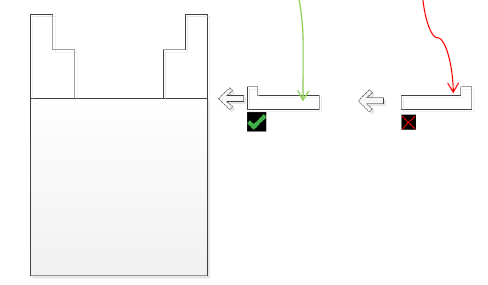
Si le capteur n’est pas encore paramétré sur le robot, installez la pièce de détection sur la pince de préhension.Fixez la pièce de détection de métal dans la pince de préhension comme indiqué sur l’illustration.
|
Assurez-vous de placer la pièce métallique dans la bonne direction. |
2.3. Paramétrage des capteurs utilisés pour détecter la fermeture de la pince de préhension
Fermez les pinces de préhension.Modifiez l’écran du Teach Pendant en « I/O Robot Out » (E/S Robot Sortie) en cliquant sur F3 IN/OUT (ENTRÉE/SORTIE).Ensuite fermez la pince de préhension en cliquant sur F4 ON (ACTIVER).Modifiez les sorties de manière à ce que les pinces de préhension à droite puissent se fermer.
Vissez la plaque de détection de métal de l’extérieur vers l’intérieur, de sorte que vous vissiez d’abord complètement la plaque de détection.Revissez lentement la plaque vers l’intérieur jusqu’à l’extinction de l’information signalée au moyen de la diode LED.Le capteur est configuré dès l’extinction de l’information signalée au moyen de la diode LED.Verrouillez la plaque de détection dans cette position.
|
Veillez à ne pas visser la plaque de détection plus vers l’intérieur que nécessaire. |
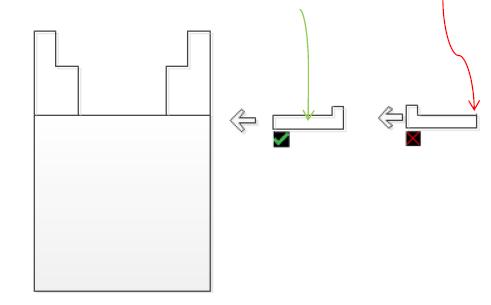
Si le capteur n’est pas encore paramétré sur le robot, vous devez vous-même installer la pièce de détection sur la pince de préhension.Fixez la pièce de détection de métal dans la pince de préhension comme indiqué sur l’illustration.
|
Assurez-vous de placer la pièce métallique dans la bonne direction.La direction est inverse à celle des capteurs pour la détection d’une pince ouverte. |
3. Comment obtenir de l’aide supplémentaire
N’hésitez pas à nous contacter lorsque vous avez besoin d’une assistance supplémentaire au-delà des documents fournis dans la base de connaissances du service RoboJob.
Vous pouvez contacter le service RoboJob Service en utilisant les moyens suivants:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Téléphone: +32 15 70 89 70
Nous vous prions de bien vouloir nous fournir les informations suivantes:
-
Numèro de sèrie xx-xx-xxx
-
Description de l’erreur ou de la piëce dèfectueuse
-
Message ou code d’erreur exact
-
Qu’a fait le robot
-
Qu’Ètait-il supposè faire
-
Photos ou vidèos
Vous pouvez nous envoyer ces informations par e-mail.Pour envoyer des fichiers volumineux, vous pouvez utiliser un service de transfert de fichiers comme WeTransfer: robojob.wetransfer.com.
Une confirmation automatique vous sera envoyée dès réception de votre courrier.