Absence de réaction d’une ou plusieurs unités constitutives du système
|
Ce document explique les étapes de dépannage qui peuvent être suivies pour étudier les problèmes de connexion.Ces problèmes sont normalement indiqués par les messages d’erreur: Aucune réponse de l’appareil ou non connecté à l’appareil. |
1. Servez-vous des outils suivants
|
|
|
|
|
|
|
|




2. Procédure
2.1. redémarrage de toutes les unités
Redémarrez toutes les unités : IPC, unité de commande du robot, table d’empilement, machine et interface avec les unités du système.Le logiciel est susceptible de se trouver dans un état non valide.Un redémarrage de l’unité concernée pourrait suffire à le réinitialiser.
Après avoir relancé le logiciel, assurez-vous que toutes les unités sont sous tension et en cours d’exploitation.Le logiciel installé sur l’IPC devrait se lancer dès que toutes les autres unités constitutives du système sont prêtes.
Le logiciel Turn Assist ne procède à des connexions que lors de son lancement.En cas de perte d’une liaison, il convient de relancer le logiciel.
2.2. test par ping
Un test par ping permet de vérifier si le réseau est correctement configuré.Un test par ping concluant signifie que la communication est possible avec l’unité considérée, mais que le réseau manque peut-être de fiabilité ou que le logiciel pose encore problème.
Ouvrez le clavier virtuel sur l’écran de l’IPC ou raccordez un clavier USB.


Cliquez sur Démarrer ensuite cliquez sur Exécuter… pour ouvrir une fenêtre d’exécution.
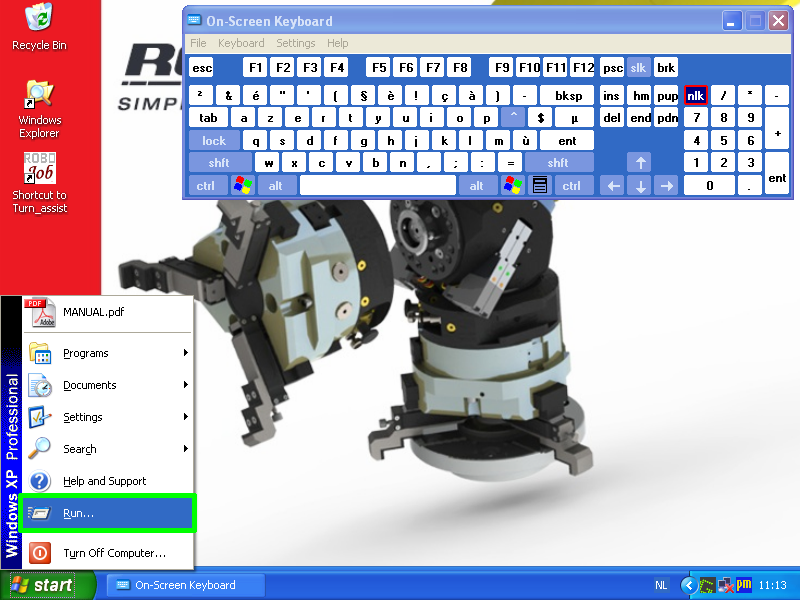
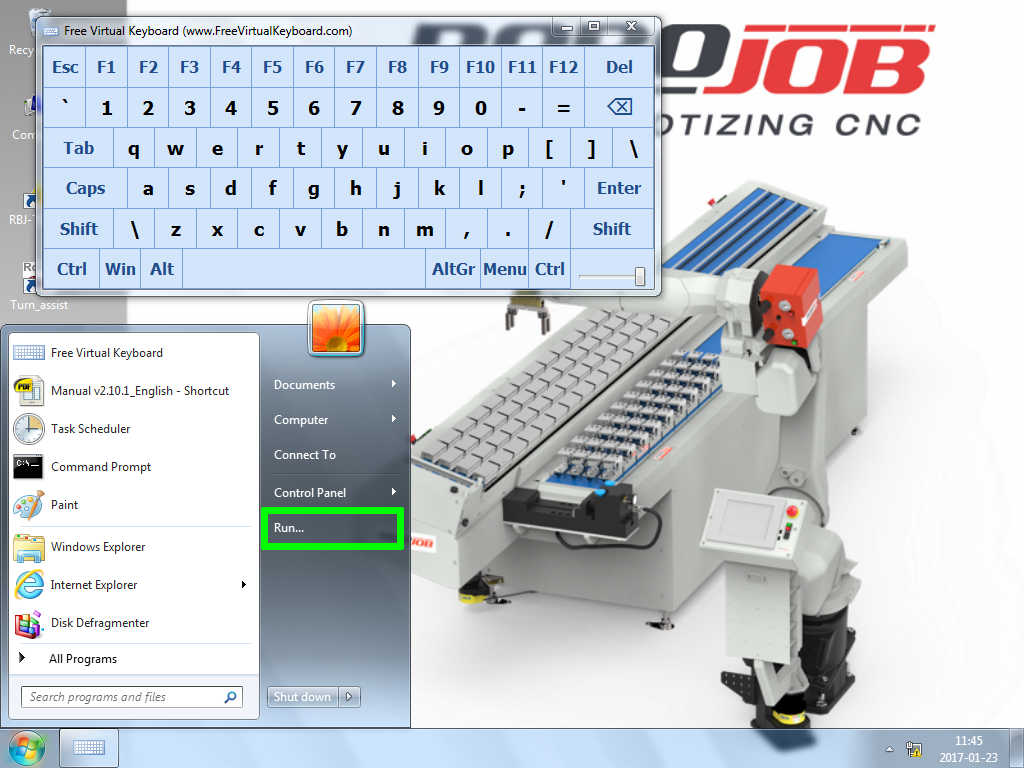
Saisissez la commande cmd.exe pour ouvrir une Invite de commande.
Entrez la commande ping suivie de l’adresse IP concernée, ensuite appuyez sur la touche Entrée pour tester une unité.À titre d’exemple, saisissez les caractères « ping 192.168.200.9 » pour vérifier la connexion avec le robot.
Adresses IP utilisées dans le cadre d’une installation standard :
| Table d’empilement (API) | 192.168.200.10 |
|---|---|
|
Moteur 1 de la table d’empilement |
192.168.200.7 |
|
Moteur 2 de la table d’empilement |
192.168.200.8 |
|
Interface avec les unités du système (machine) |
192.168.200.6 |
|
Unité de commande de robot |
192.168.200.9 |
|
IPC (console logicielle) |
192.168.200.4 |
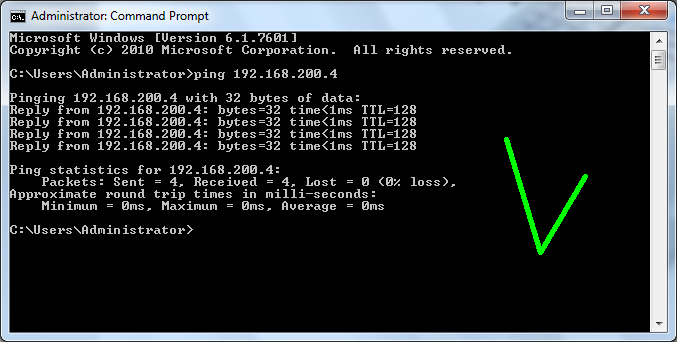
Si l’unité testée réagit, le résultat affiché ressemblera à l’illustration ci-après et les modalités de communication seront satisfaisantes.
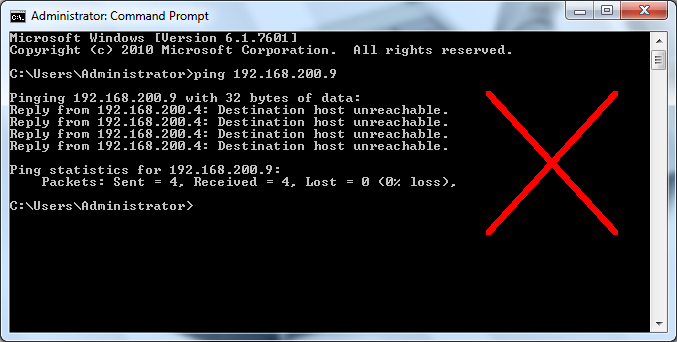
Si l’unité testée ne réagit pas, le résultat affiché sera différent et un message d’erreur s’affichera.Vérifiez les câbles de communication et assurez-vous que le logiciel est en cours d’exploitation.
2.3. vérification de la configuration logicielle
Vérifiez si les adresses IP et les numéros de port sont correctement configurés dans le logiciel.Cette opération ne se justifie qu’après l’apport de modifications logicielles.
2.4. vérification des câbles.
Assurez-vous que tous les câbles sont raccordés.Assurez-vous de l’absence de coupure, rupture ou endommagement des câbles.
Tous les câbles doivent être raccordés à un commutateur central Ethernet incorporé à la table d’empilement ou à l’unité de commande du robot.
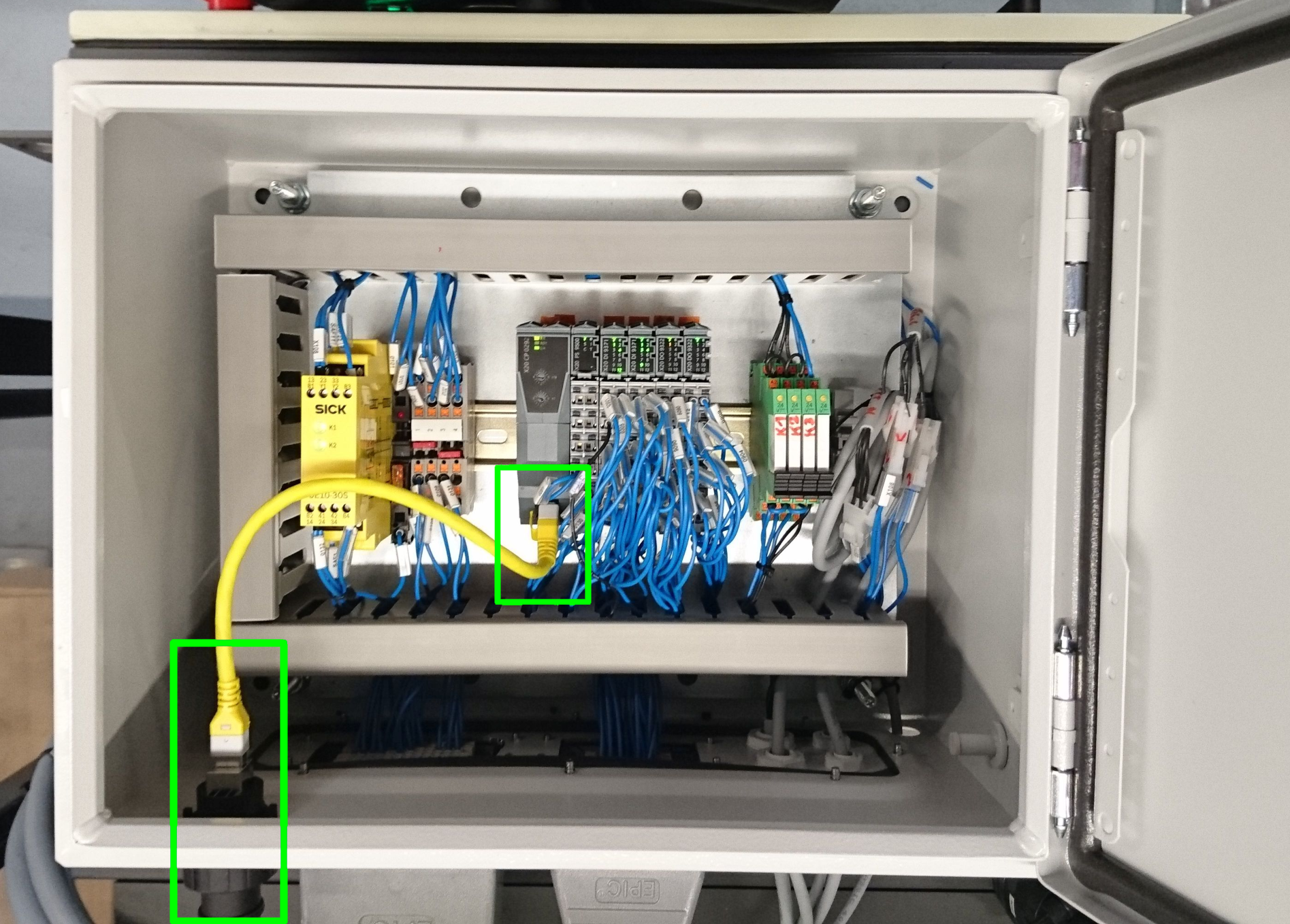
2.4.1. Table d’empilement
Vérifiez les connexions Ethernet à l’extérieur de la table d’empilement.L’installation est susceptible de présenter un nombre variable de connexions en fonction de votre configuration.

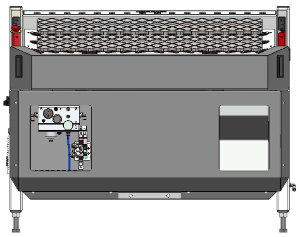
Ouvrez la porte de la table d’empilement et vérifiez les connexions Ethernet présentes à l’intérieur de celle-ci.

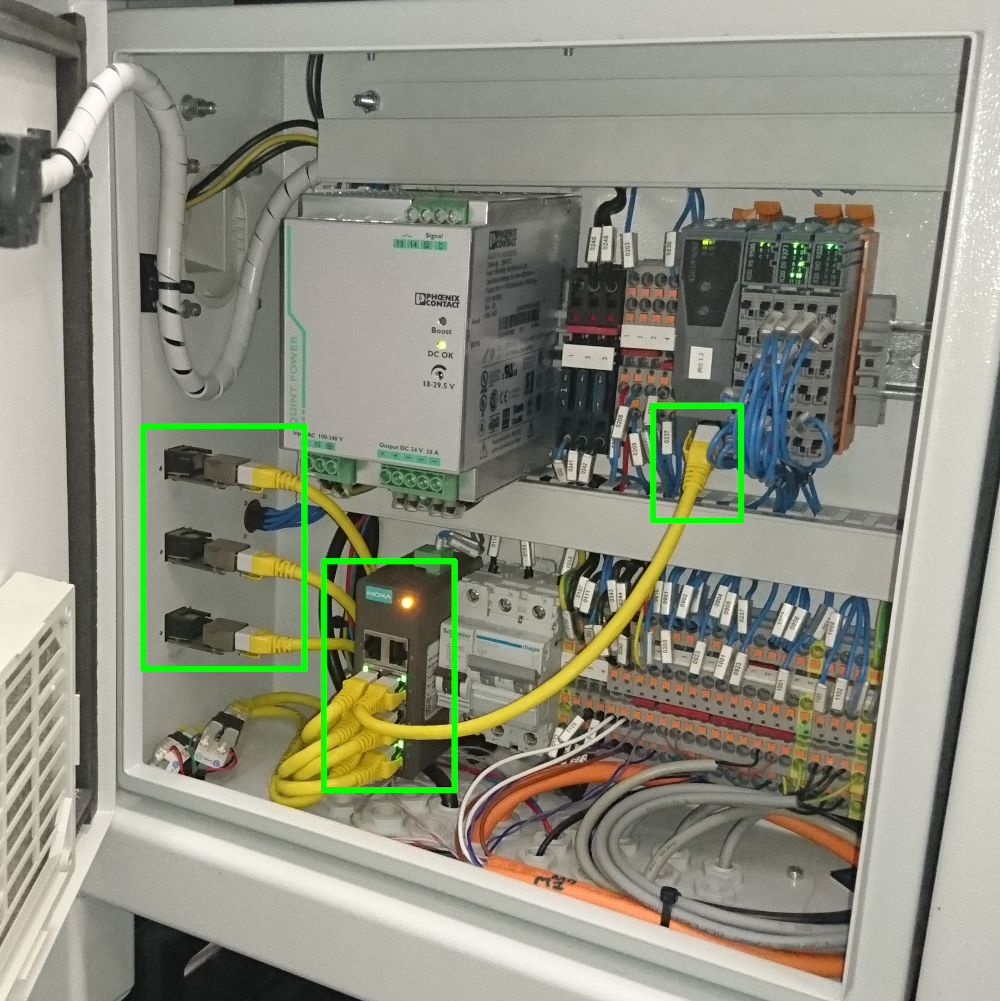
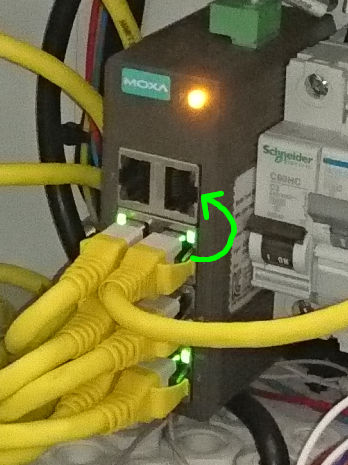
L’incorporation ou non du commutateur Ethernet au sein de la table d’empilement dépendra de votre configuration.Essayez de déplacer une par une les connexions que présente ce commutateur.Penchez-vous sur les voyants lumineux pour voir s’ils s’allument ou clignotent.
2.4.2. API d’interface avec les unités du système
Vérifiez le câble Ethernet au niveau de l’API d’interface incorporé à la machine.L’interface avec les unités du système est un API que RoboJob met à contribution pour communiquer avec la machine.
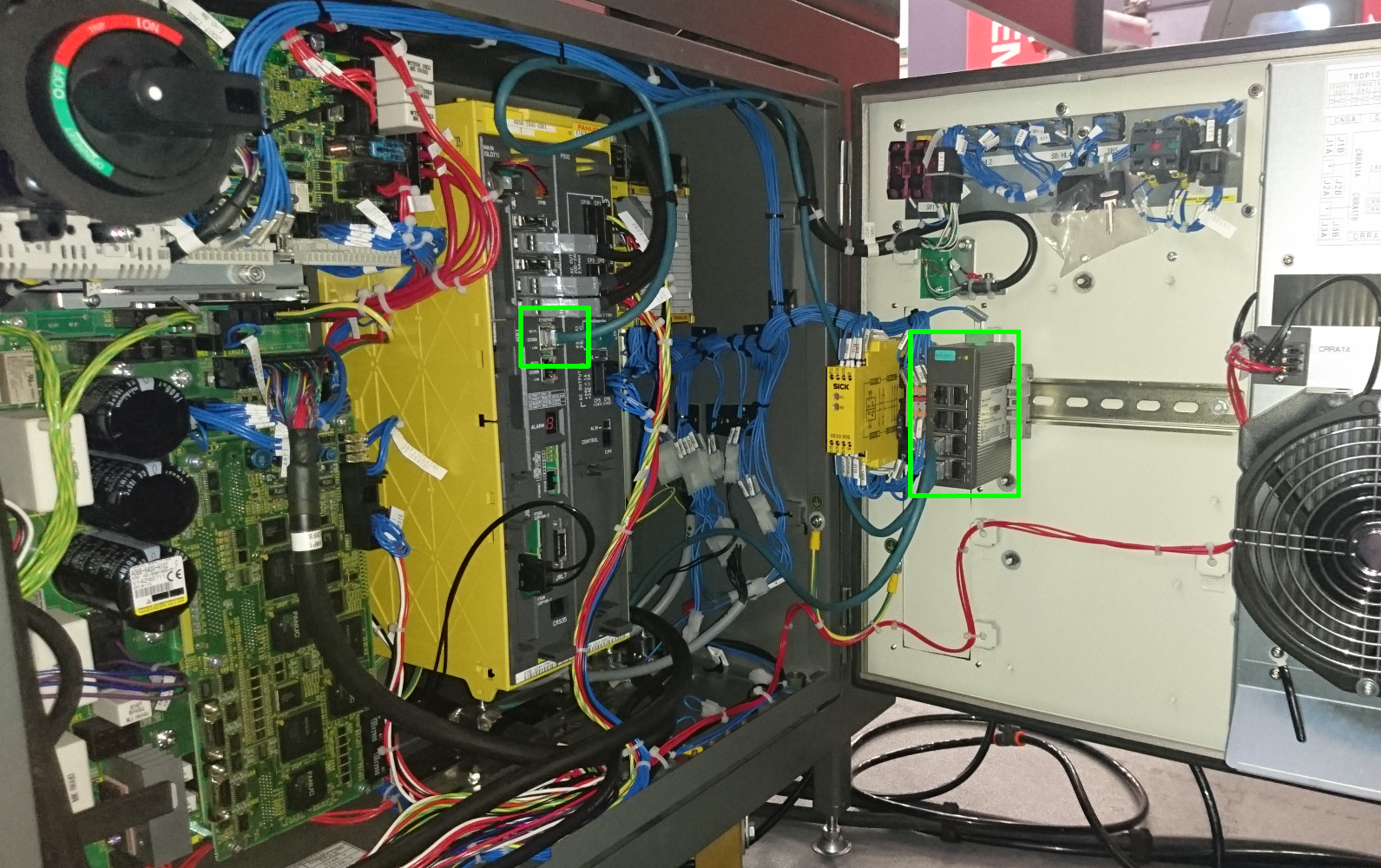
2.4.3. Robot
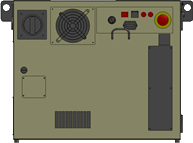
Ouvrez la porte de l’unité de commande du robot et vérifiez les connexions Ethernet présentes à l’intérieur de celle-ci.Assurez-vous que le câble Ethernet est raccordé au port approprié.
L’incorporation ou non du commutateur Ethernet au sein de l’unité de commande dépendra de votre configuration.
2.4.4. IPC
Pour démonter l’IPC, dévissez-en les six vis de fixation latérales.
Assurez-vous que le câble Ethernet est correctement raccordé au port approprié.
Veuillez noter que vous devez rebrancher le câble Ethernet dans le port IPC dans lequel il était initialement installé.Les ports IPC sont des cartes réseau séparées, ils ne sont pas commutés!


2.5. utilisation d’un testeur de câbles
Servez-vous d’un testeur de câbles LAN pour vérifier les câbles Ethernet.Reportez-vous au manuel du testeur de câbles pour apprendre à en maîtriser l’utilisation.Cet essai vous permettra de vous assurer du câblage correct des câbles Ethernet.
2.6. remplacement de câbles
Remplacez tous les câbles qui échoueraient à l’un des tests qui précèdent.
Si le test ci-dessus est concluant, mais que la connexion continue à être problématique, tentez de remplacer le câble concerné par un câble temporaire parfaitement fonctionnel.Vous pouvez faire passer ce câble autour de la machine pour procéder à ces essais.En cas de récurrence des problèmes de connexion relevés, le câble n’est pas en cause.
3. Comment obtenir de l’aide supplémentaire
N’hésitez pas à nous contacter lorsque vous avez besoin d’une assistance supplémentaire au-delà des documents fournis dans la base de connaissances du service RoboJob.
Vous pouvez contacter le service RoboJob Service en utilisant les moyens suivants:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Téléphone: +32 15 70 89 70
Nous vous prions de bien vouloir nous fournir les informations suivantes:
-
Numèro de sèrie xx-xx-xxx
-
Description de l’erreur ou de la piëce dèfectueuse
-
Message ou code d’erreur exact
-
Qu’a fait le robot
-
Qu’Ètait-il supposè faire
-
Photos ou vidèos
Vous pouvez nous envoyer ces informations par e-mail.Pour envoyer des fichiers volumineux, vous pouvez utiliser un service de transfert de fichiers comme WeTransfer: robojob.wetransfer.com.
Une confirmation automatique vous sera envoyée dès réception de votre courrier.