Calibrage de la hauteur de la table TA - Multi-Assist (gen 1 table)
|
Ce document porte sur le calibrage de la hauteur de la table d’empilement.Cette table nécessite un recalibrage après l’apport de toute modification aux organes mécaniques ou électriques de cette dernière. |
1. Servez-vous des outils suivants
|
|
|
|


2. Procédure
2.1. Alignement et mesure de la hauteur de la table
Mesurez la hauteur de la table à proximité des barres de support et ce, à partir du haut des colonnes de support.Déposez toutes les autres colonnes et servez-vous de la même colonne pour procéder à toutes les mesures afin de prévenir toute erreur de mesure.

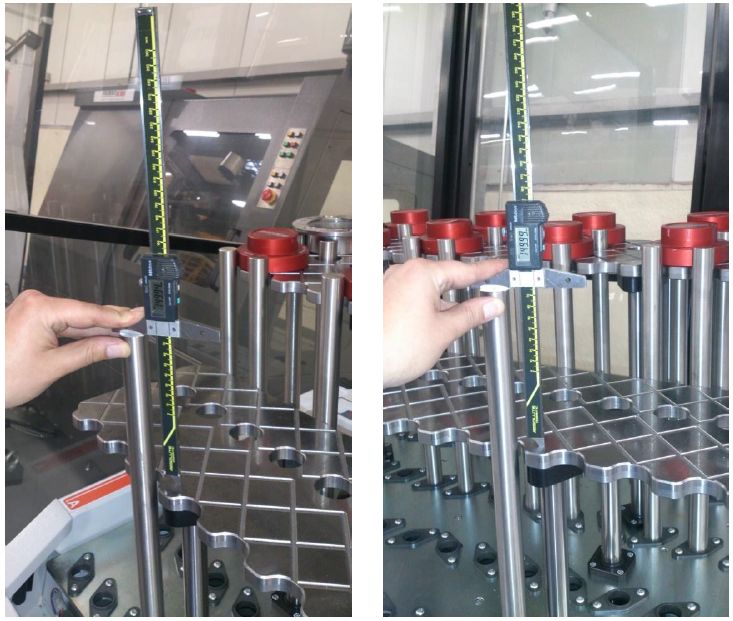
Réglez la hauteur des barres de support jusqu’à ce que la table soit parallèle au plateau supérieur de l’empileur.L’écart relevé entre les mesures de la hauteur de la table (défaut de parallélisme) devrait être inférieur à 0,1 mm.
2.2. Navigation jusqu’à l’écran de paramétrage
Mettez l’empileur sous tension.Démarrez l’IPC, puis lancez le logiciel Multi-Assist.Passez à l’écran de configuration
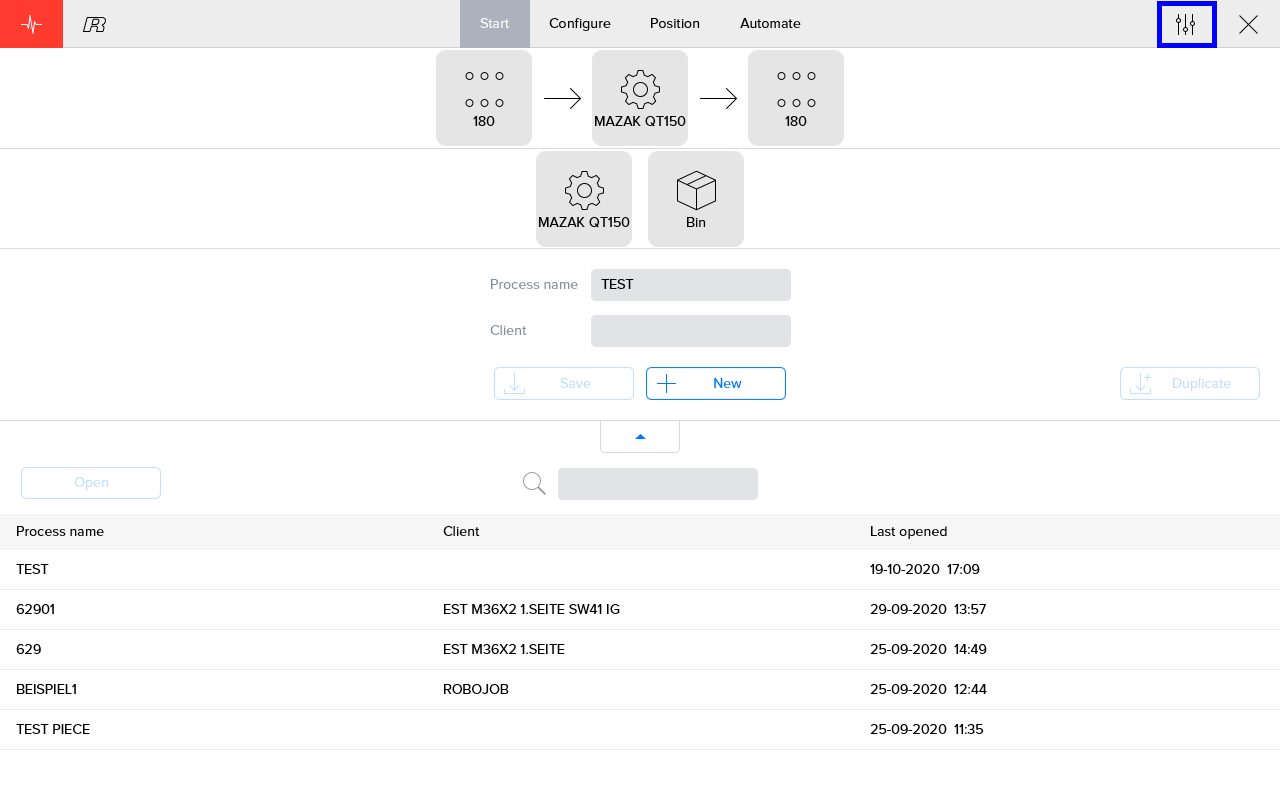
Servez-vous du mot de passe fourni par RoboJob pour entrer en session.
|
Veillez à ne modifier aucun autre paramètre que celui mentionné dans ce document lorsque la configuration est déverrouillée.L’utilisation de ce mot de passe à d’autres fins que celles expliquées dans ce document n’est pas autorisée. |

2.3. Calibrage de la table
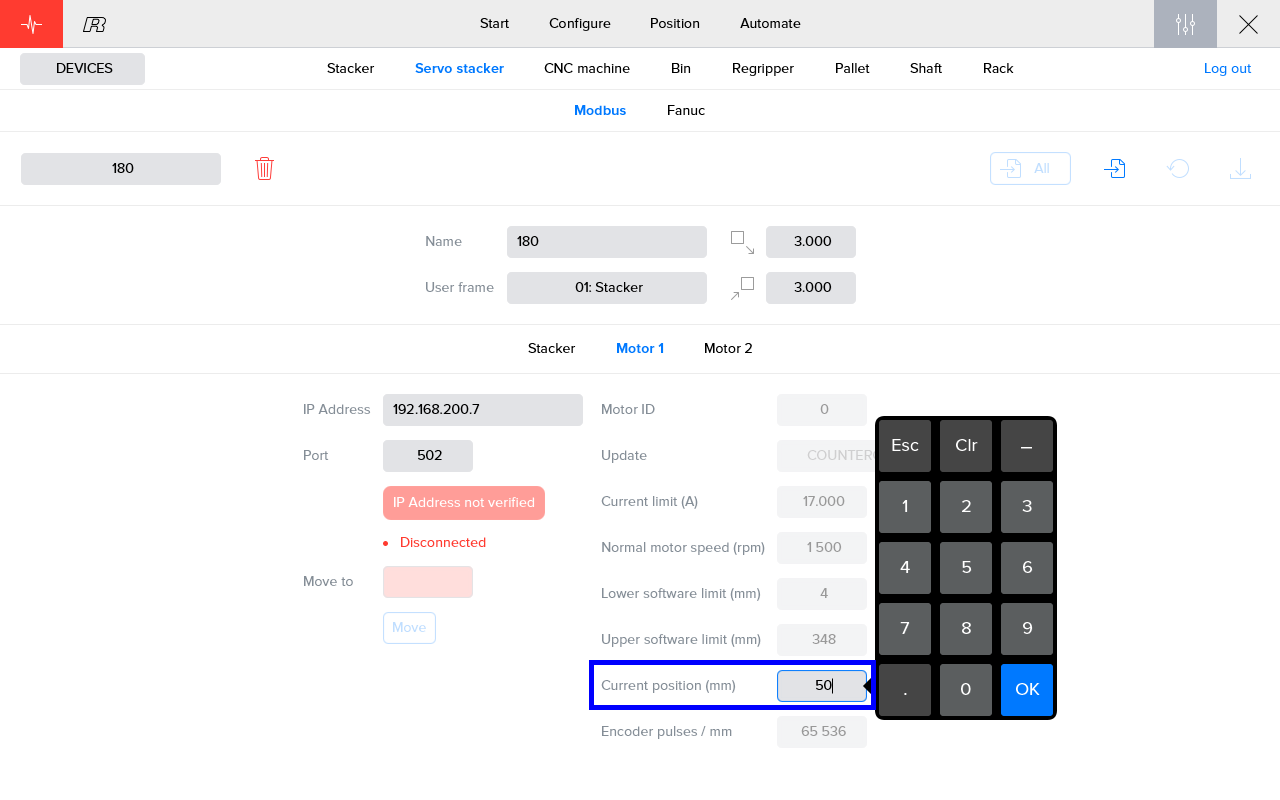
Naviguez jusqu’à l’onglet unités auquel le logiciel permet d’accéder.Sélectionnez successivement les options Servo-table puis Modbus.Sélectionnez la table à régler.Le moteur 1 déplace la table avant, le moteur 2 la table arrière.
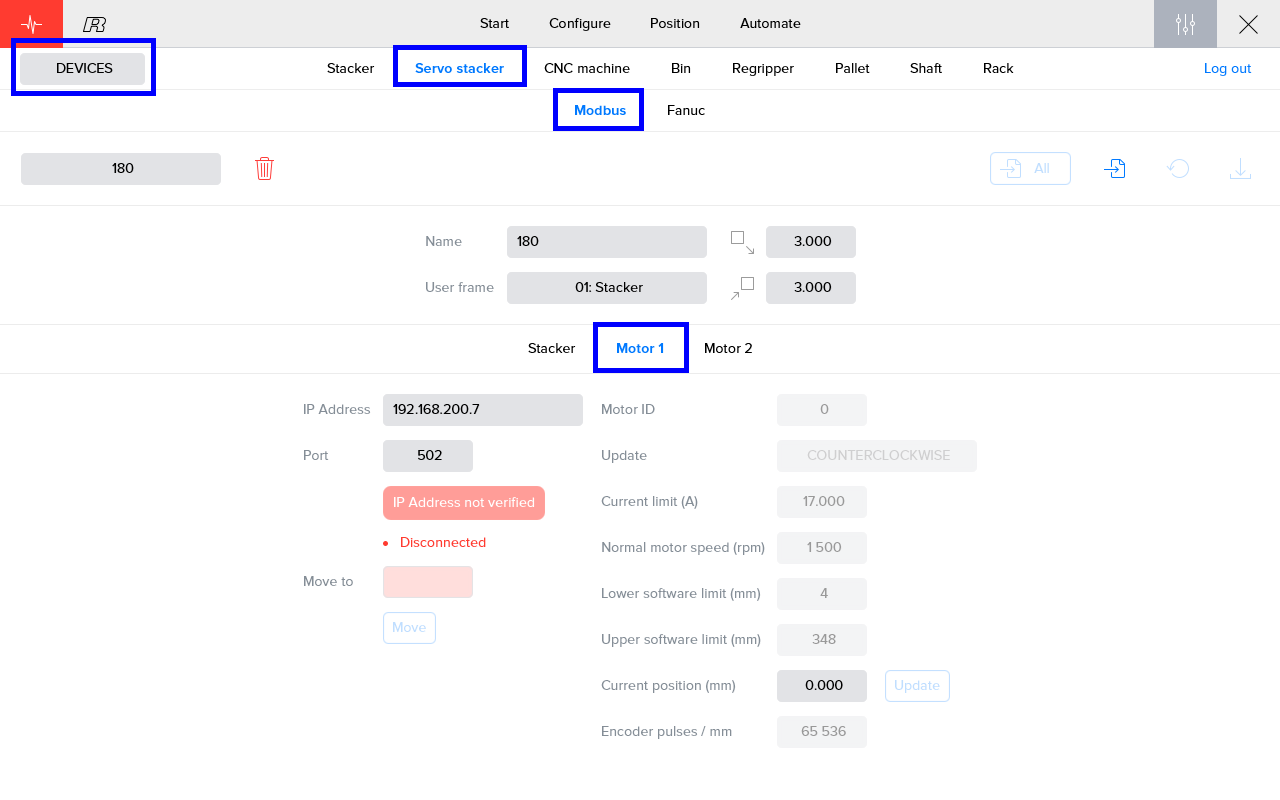
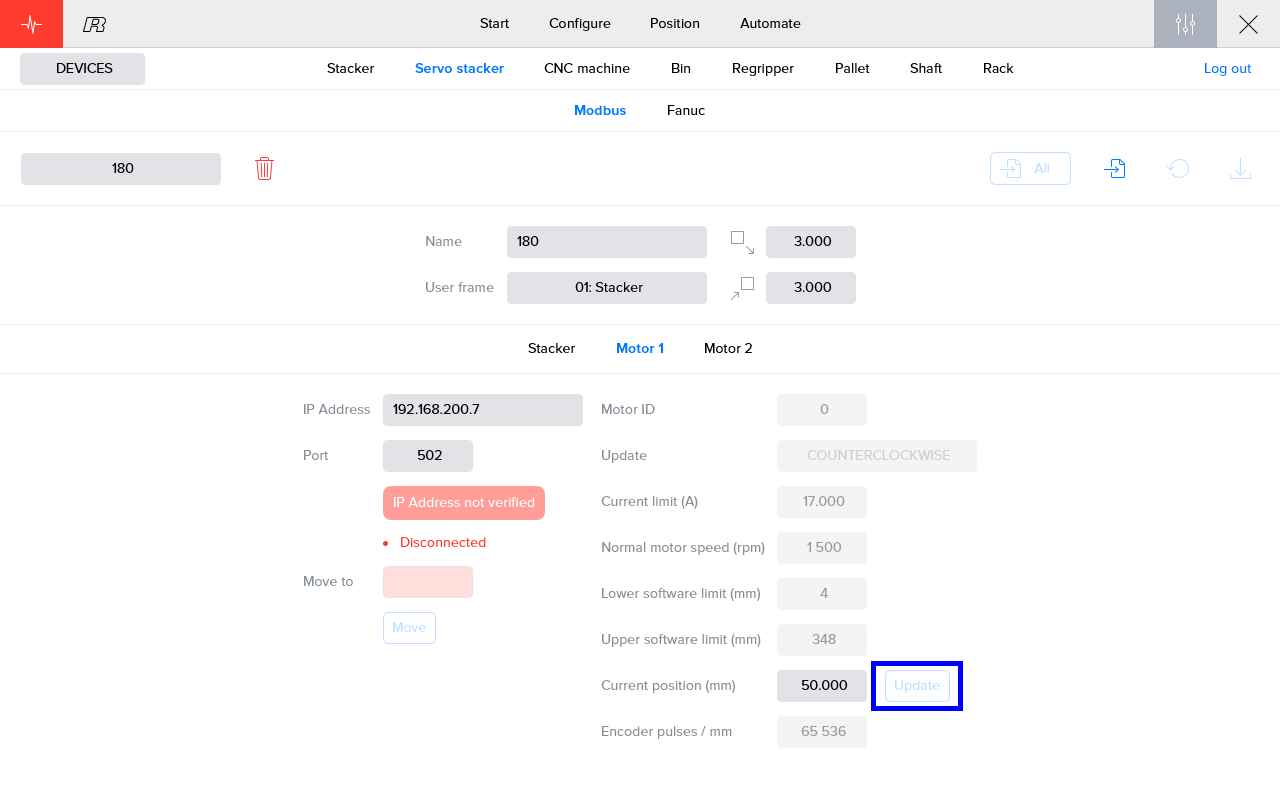
Entrez la hauteur précise de la table que vous avez mesurée auparavant.Dans cet exemple, la distance mesurée s’élevait à 50 mm.
Envoyez la valeur corrigée à l’unité de gestion des moteurs.
2.4. Redémarrage du système
Mettez le système hors tension et patientez 30 secondes au moins avant de le remettre sous tension.Cette opération aura pour effet d’activer la nouvelle configuration au sein de l’unité de gestion des moteurs.
3. Comment obtenir de l’aide supplémentaire
N’hésitez pas à nous contacter lorsque vous avez besoin d’une assistance supplémentaire au-delà des documents fournis dans la base de connaissances du service RoboJob.
Vous pouvez contacter le service RoboJob Service en utilisant les moyens suivants:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Téléphone: +32 15 70 89 70
Nous vous prions de bien vouloir nous fournir les informations suivantes:
-
Numèro de sèrie xx-xx-xxx
-
Description de l’erreur ou de la piëce dèfectueuse
-
Message ou code d’erreur exact
-
Qu’a fait le robot
-
Qu’Ètait-il supposè faire
-
Photos ou vidèos
Vous pouvez nous envoyer ces informations par e-mail.Pour envoyer des fichiers volumineux, vous pouvez utiliser un service de transfert de fichiers comme WeTransfer: robojob.wetransfer.com.
Une confirmation automatique vous sera envoyée dès réception de votre courrier.