Ramener manuellement le robot à sa position initiale - Turn-Assist
|
La position qu’occupe le robot est inconnue et son retour automatique à sa position initiale s’avère impossible.Exécutez cette procédure pour ramener le robot à sa position initiale. |
- 1. Servez-vous des outils suivants
-
2. Procédure
- 2.1. Passage du robot en mode manuel
- 2.2. Permettre un mouvement manuel par l’arrêt du logiciel du robot
- 2.3. Réinitialiser tous les défauts
- 2.4. Déplacer le robot manuellement
- 2.5. Envoyer manuellement le robot à la position d’origine
- 2.6. Retour au mode automatique
- 2.7. Redémarrer le logiciel du robot
- 3. Comment obtenir de l’aide supplémentaire
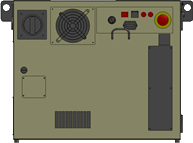
1. Servez-vous des outils suivants
|
|
|

2. Procédure
2.1. Passage du robot en mode manuel
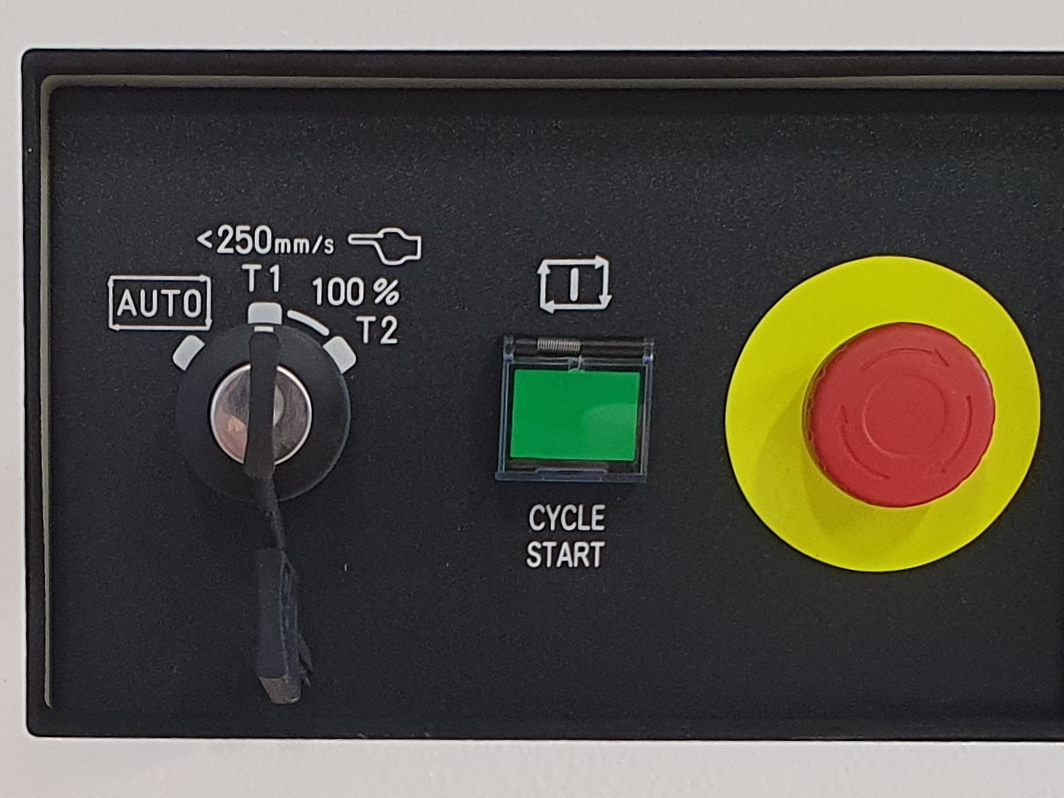
Amenez le commutateur à trois positions de l’unité de commande du robot sur la position T1-Mode.
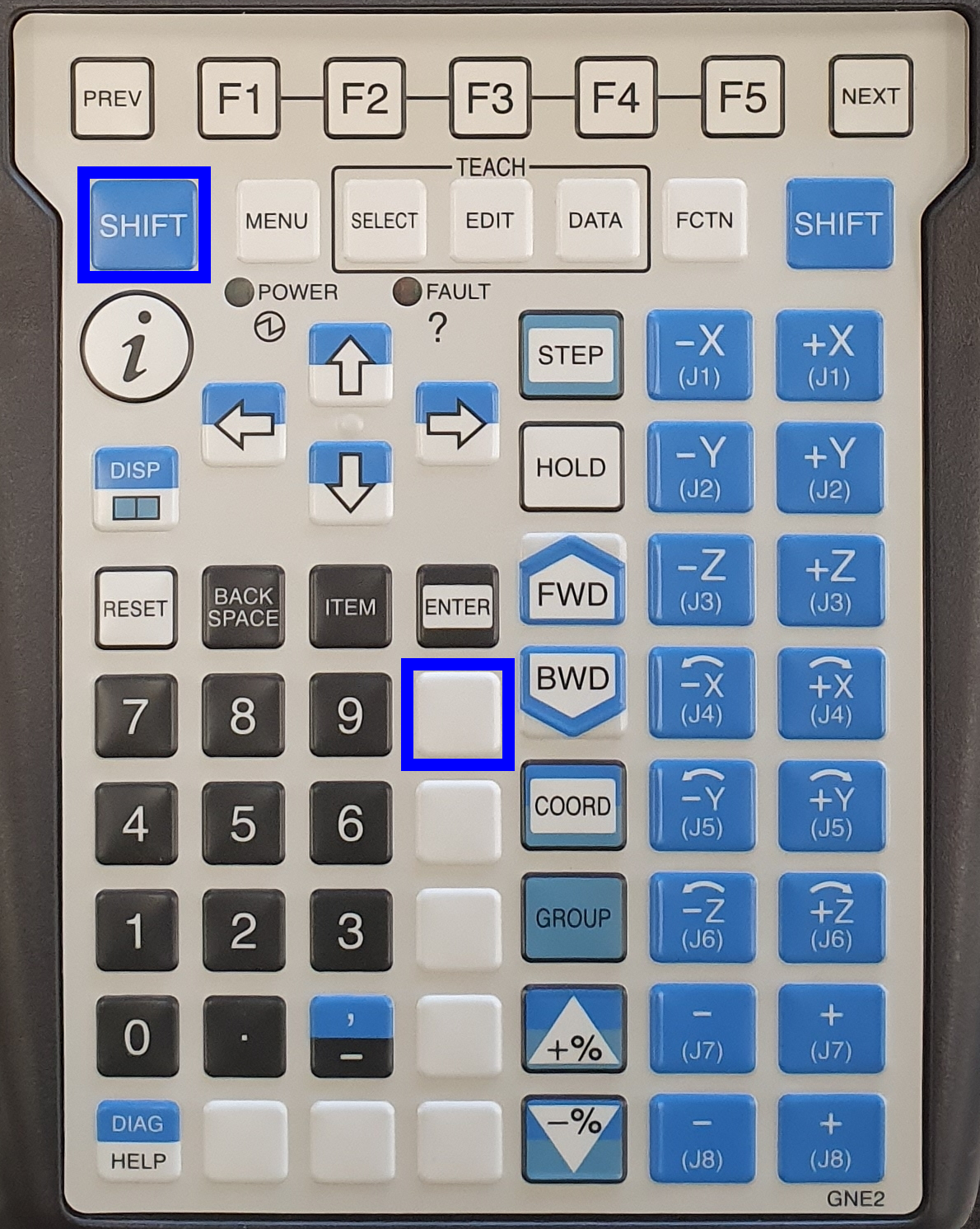
Amenez le commutateur à deux positions du Teach Pendant sur la position On-Mode.

2.2. Permettre un mouvement manuel par l’arrêt du logiciel du robot
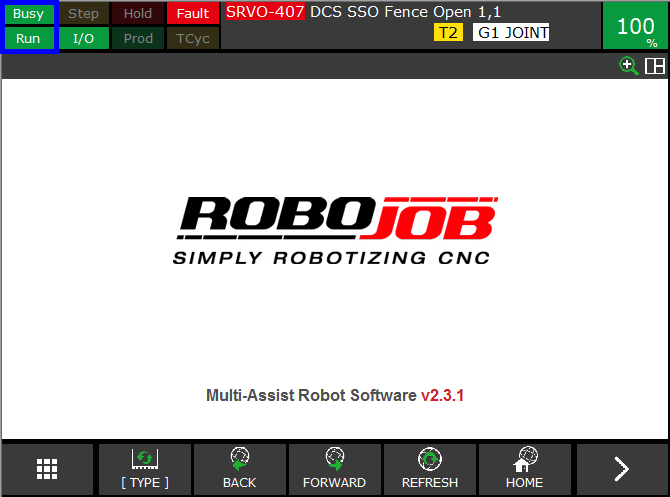
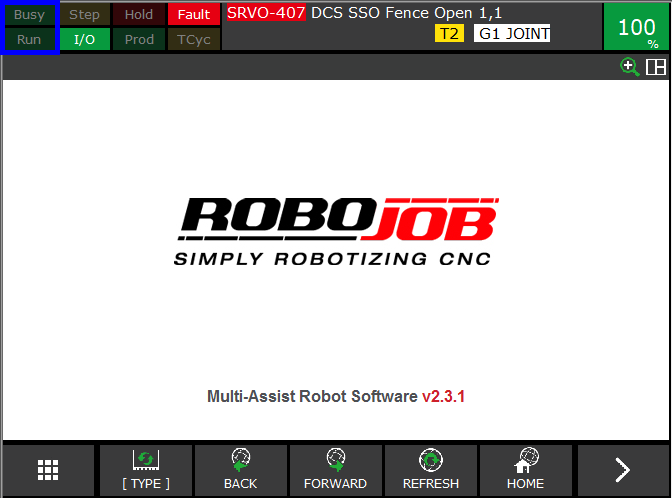
Remarquez les indicateurs 'Busy' et 'Run' en haut à gauche de l’écran du Teach Pendant.À ce moment, ils devraient être verts, indiquant que le logiciel du robot est en cours d’exécution.
Presse SHIFT + le bouton blanc (tool 1) sous ENTRER pour arrêter le logiciel du robot.
Les indicateurs 'Busy' et 'Run' sur le haut du teach pendant d’enseignement doivent devenir inactifs.
2.3. Réinitialiser tous les défauts
Pour déplacer le robot en toute sécurité, un interrupteur homme-mort situé à l’arrière du Teach Pendant doit être en position centrale
Les deux interrupteurs homme-mort ont 3 positions :
-
Pas pressée
-
Une position intermédiaire sûre
-
Entièrement pressée
Essayez si vous pouvez sentir les trois positions.Pour pouvoir réinitialiser l’erreur et déplacer le robot, un seul des deux interrupteurs homme-mort doit être en position centrale de sécurité.Alors ne poussez pas trop fort ou trop doucement !
Appuyez sur la bouton SHIFT en même temps que sur la bouton RESET pour effacer tous les défauts.
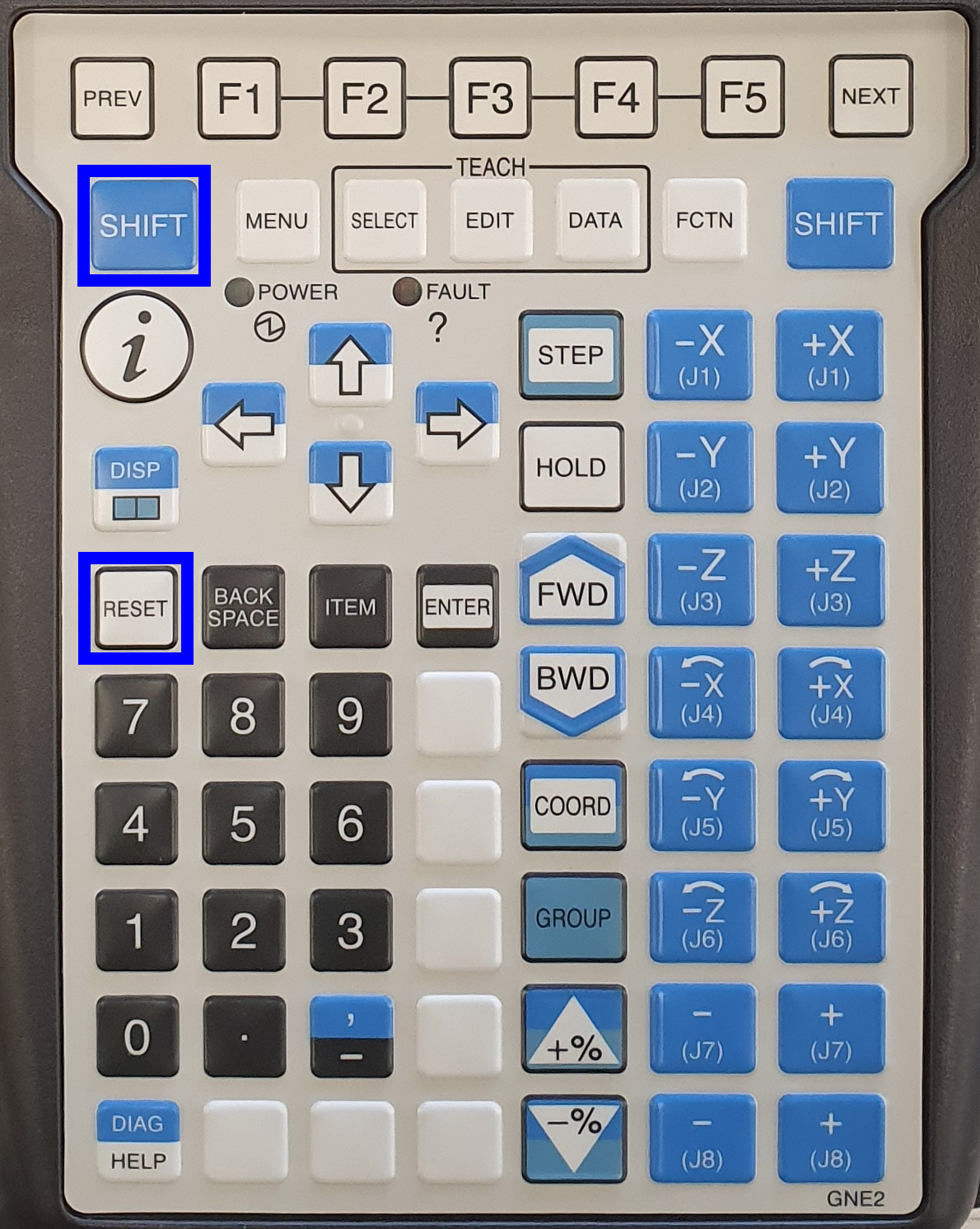
The fault indicator on the top of the teach pendant should become inactive.
2.4. Déplacer le robot manuellement
|
Veillez à ce que le robot ne touche rien pendant le mouvement.Faites attention aux autres personnes, aux machines environnantes, aux autres objets et au robot lui-même.Assurez-vous que les câbles autour du robot ne soient pas endommagés. |
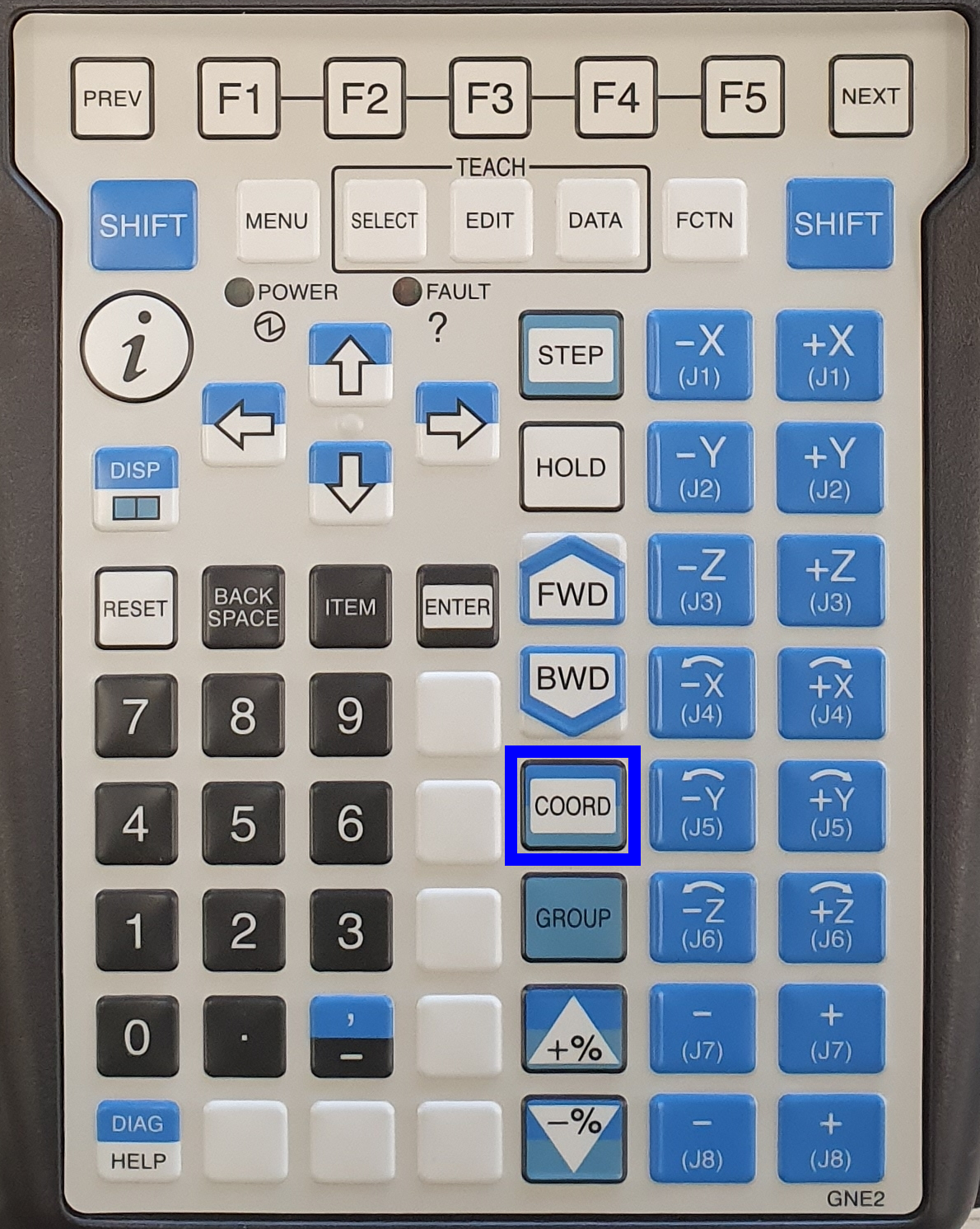
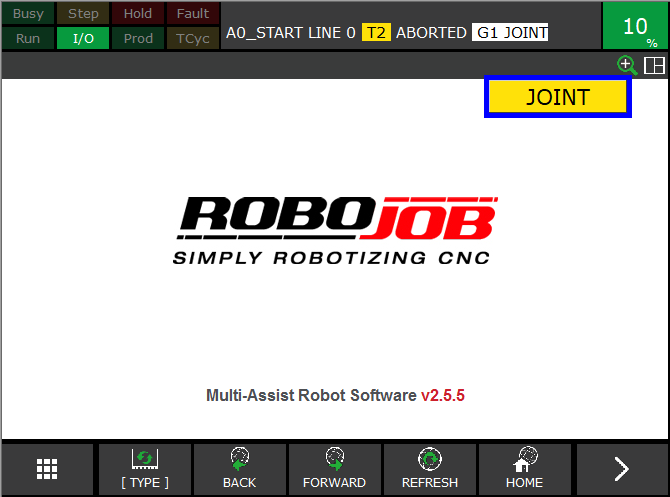
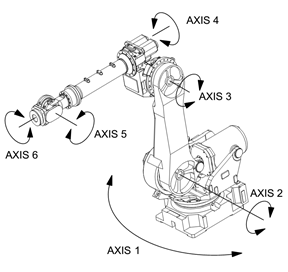
Appuyez sur COORD pour modifier le mode de déplacement.Appuyez sur la touche jusqu’à ce que l’option JOINT soit sélectionnée.Le mode de mouvement JOINT est le plus facile à utiliser.Vous pouvez déplacer les joints un par un.
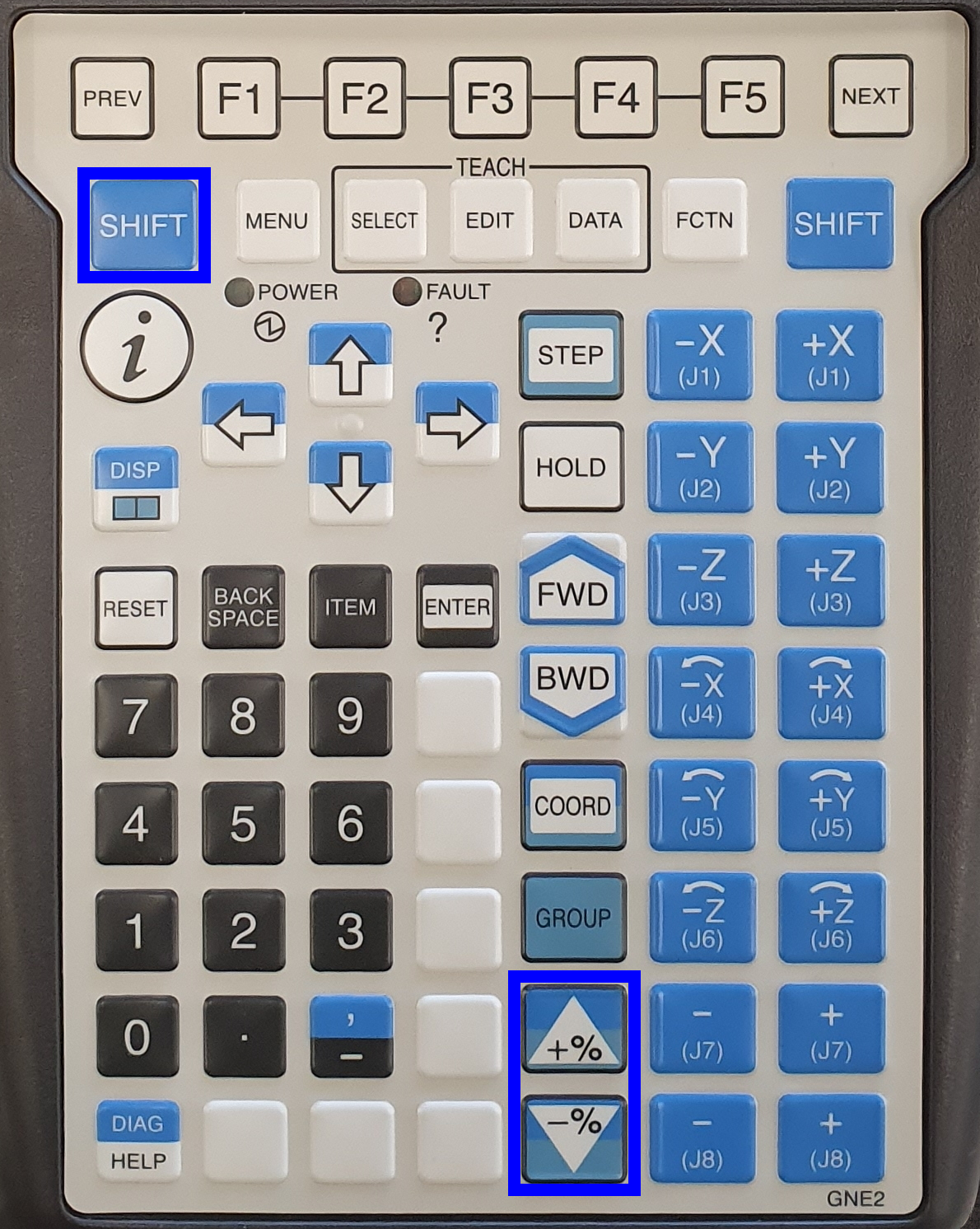
Press SHIFT + ±J1-8 to move the robot.
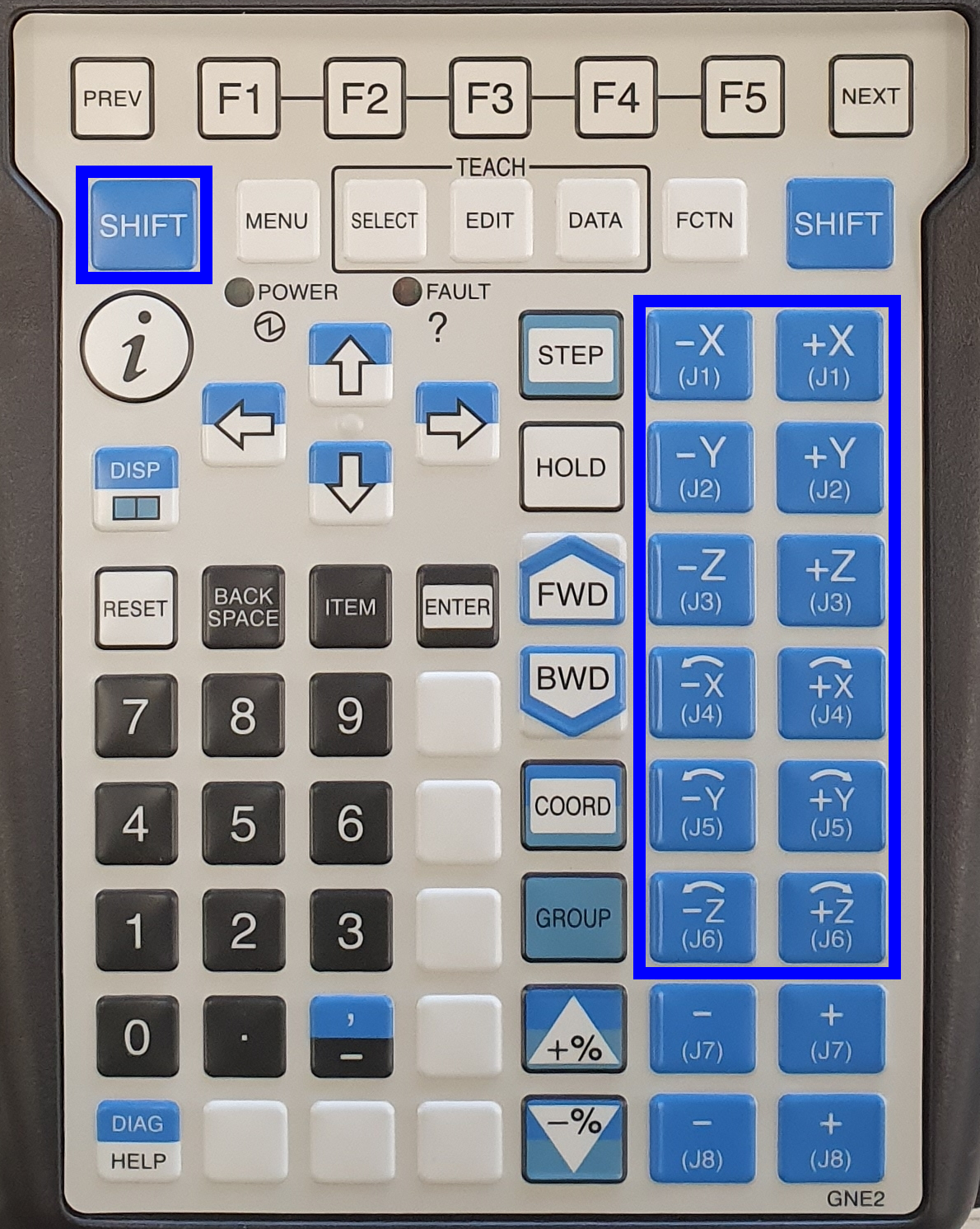
Appuyez sur SHIFT + +% ou -% pour ajuster la vitesse.
2.5. Envoyer manuellement le robot à la position d’origine
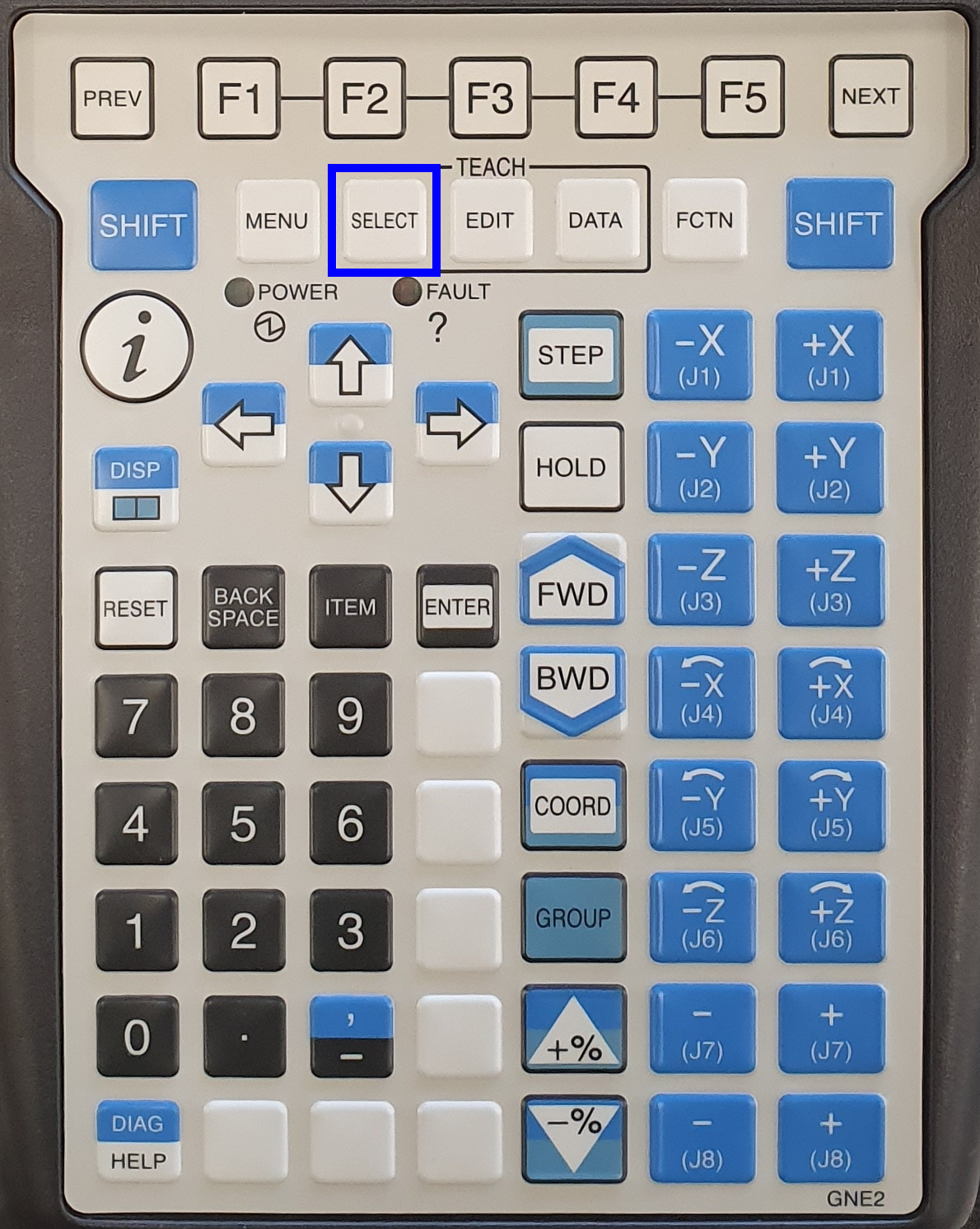
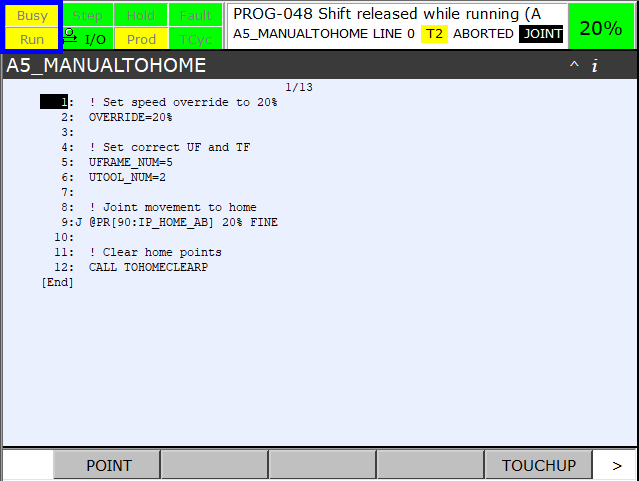
Appuyez sur la touche SELECT pour ouvrir le menu de sélection du programme. Servez-vous des touches UP et DOWN pour sélectionner l’option A5_MANUALTOHOME.Maintenez la touche SHIFT [MAJ.] pour obtenir un défilement plus rapide.
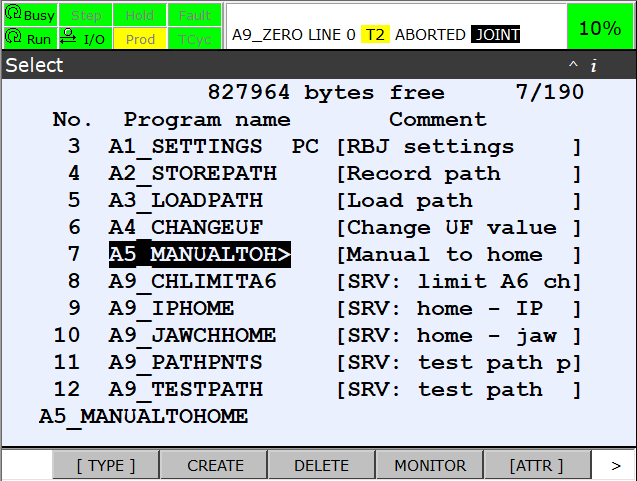
Après avoir sélectionné l’option A5_MANUALTOHOME, appuyez sur la touche ENTER pour ouvrir ce programme.
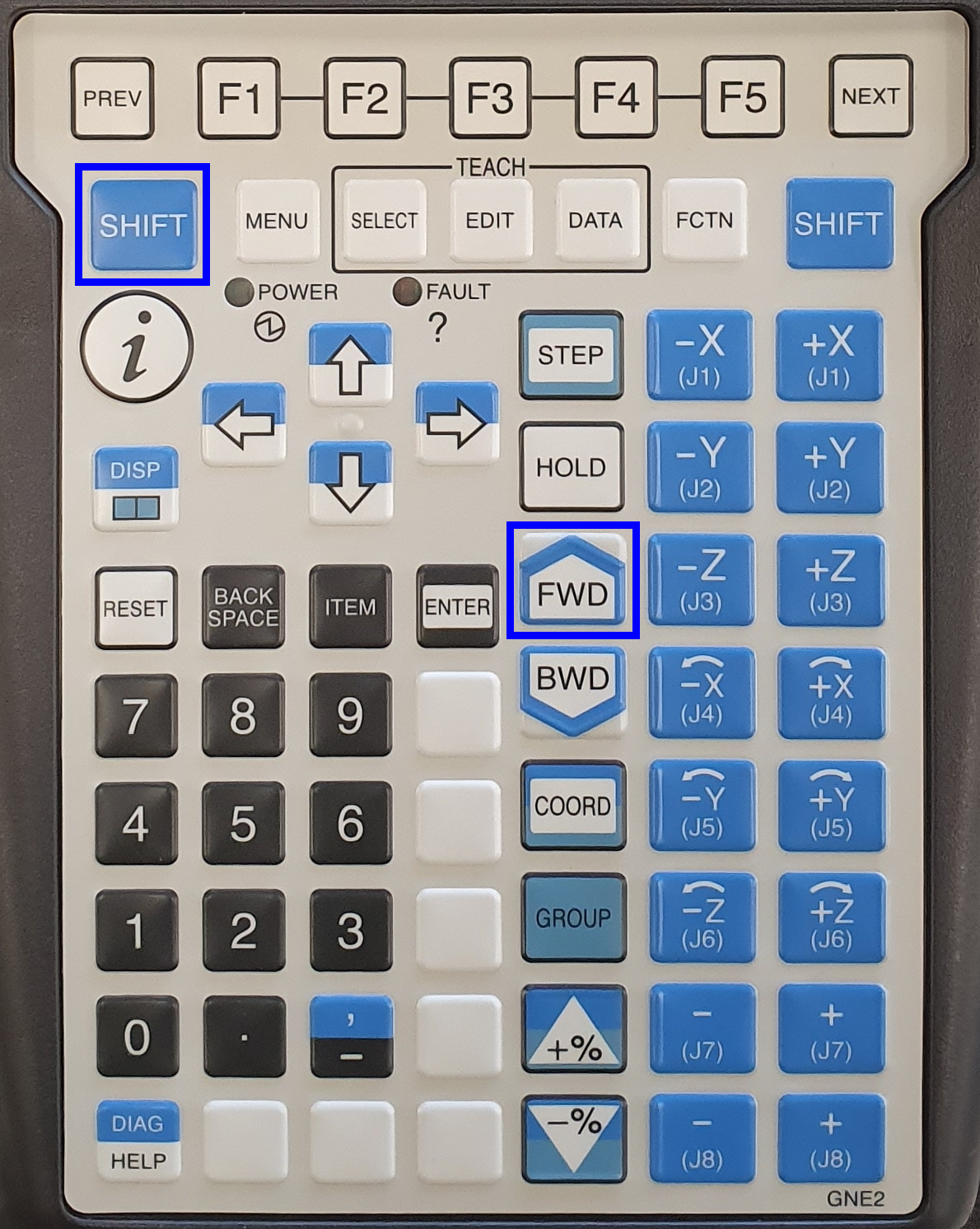
Appuyez sur la touche SHIFT [MAJ.] + FWD pour exécuter ce programme.Le robot reviendra à sa position initiale précise.
Relâchez la touche SHIFT [MAJ.] ou l’interrupteur de sécurité pour en arrêter le déplacement le cas échéant.
|
Veillez à ce que le robot ne heurte aucun obstacle pendant son déplacement.Soyez attentif aux personnes, aux machines environnantes, aux obstacles éventuels et au robot en tant que tel.Veillez à ne pas endommager les câbles montés autour du robot. |
Les indicateurs Busy [Occupé] et Run [Exécution] virent au vert pendant le déplacement.Maintenez la touche SHIFT [MAJ.] et l’un des interrupteurs de sécurité enfoncés jusqu’à ce que le robot ait atteint sa position initiale.
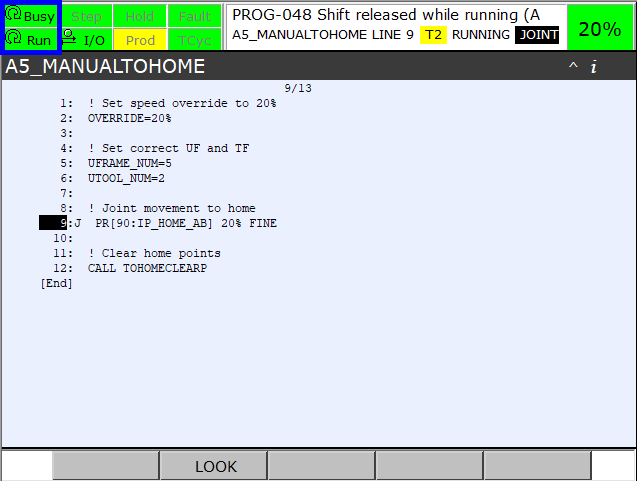
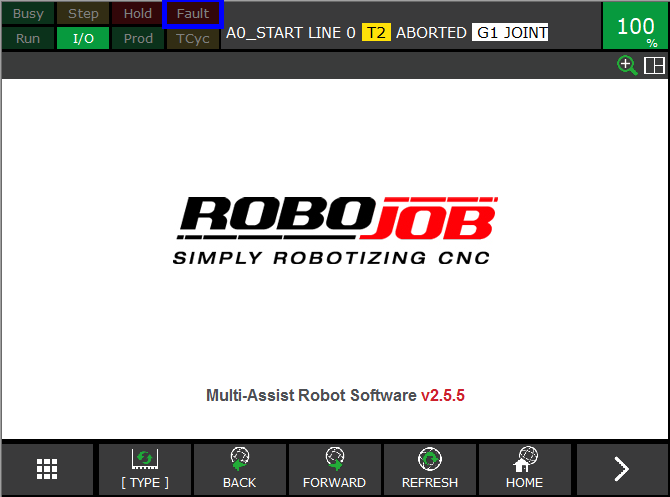
Lorsque le robot atteint sa position initiale, les indicateurs Busy [Occupé] et Run [Exécution] virent à nouveau au jaune et la première ligne du programme est sélectionnée.
2.6. Retour au mode automatique
Mettez l’interrupteur à trois positions du l’unité de commande du robot sur AUTO.

Mettez l’interrupteur à deux positions du Teach Pendant sur Off.

Assurez-vous que le mode Step est inactif. Utilisez le bouton STEP pour changer de mode.
2.7. Redémarrer le logiciel du robot
Pour rétablir la communication avec la IPC, le logiciel du robot doit être redémarré.La façon la plus simple d’y parvenir est de redémarrer le contrôleur du robot et l’IPC en faisant tourner la puissance.
3. Comment obtenir de l’aide supplémentaire
N’hésitez pas à nous contacter lorsque vous avez besoin d’une assistance supplémentaire au-delà des documents fournis dans la base de connaissances du service RoboJob.
Vous pouvez contacter le service RoboJob Service en utilisant les moyens suivants:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Téléphone: +32 15 70 89 70
Nous vous prions de bien vouloir nous fournir les informations suivantes:
-
Numèro de sèrie xx-xx-xxx
-
Description de l’erreur ou de la piëce dèfectueuse
-
Message ou code d’erreur exact
-
Qu’a fait le robot
-
Qu’Ètait-il supposè faire
-
Photos ou vidèos
Vous pouvez nous envoyer ces informations par e-mail.Pour envoyer des fichiers volumineux, vous pouvez utiliser un service de transfert de fichiers comme WeTransfer: robojob.wetransfer.com.
Une confirmation automatique vous sera envoyée dès réception de votre courrier.