Modifier ou ajouter des mâchoires sur mesure - Turn-Assist
|
Ce document décrit comment ajouter de nouvelles mâchoires (personnalisées) à la base de données du logiciel ou comment modifier les paramètres des mâchoires existantes. |
1. Servez-vous des outils suivants
|
|

2. Procédure
2.1. Ouvrez le menu de paramétrage du robot
Lancez le logiciel Turn Assist installé sur l’IPC, puis cliquez sur l’icône Paramètres.
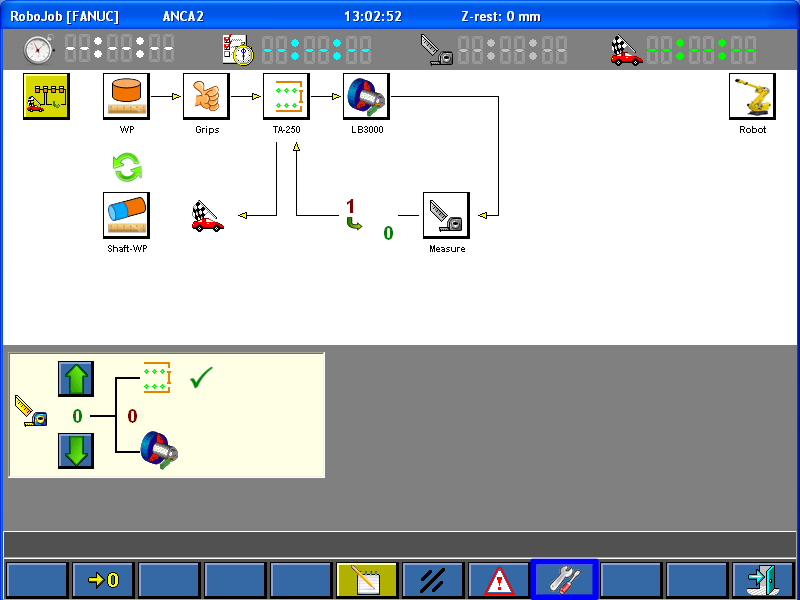
Cliquez sur l’icône Robot.
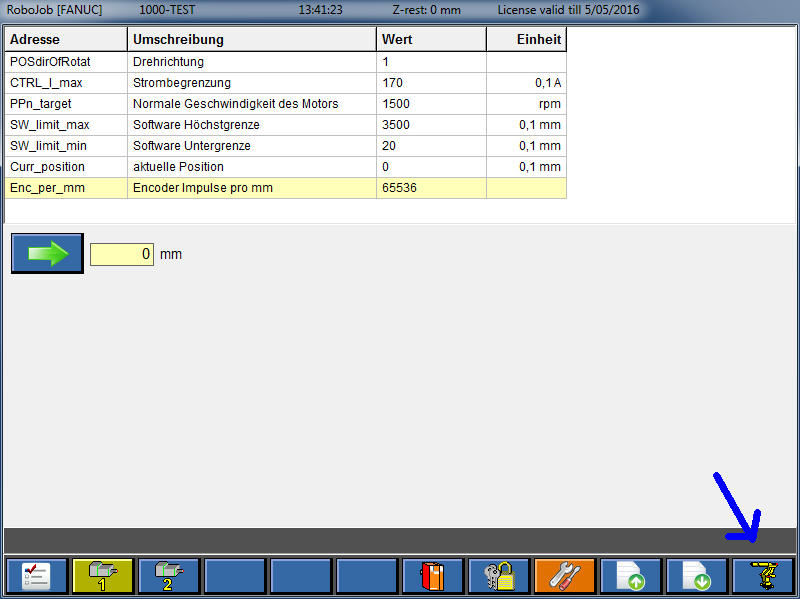
Le robot est susceptible d’être équipé de deux types de mâchoires en fonction de l’installation :
-
à 3 points :chaque pince de préhension de cette nature est pourvue de trois mâchoires situées respectivement à 0°, 120° et 240° autour de la pièce à travailler.Ces pinces s’utilisent habituellement pour enserrer des pièces à travailler discoïdales.
-
à 2 points :chaque pince de préhension de cette nature est pourvue de deux ou quatre mâchoires diamétralement opposées les unes aux autres.Ces pinces s’utilisent habituellement pour enserrer les arbres et blocs à travailler.
Les touches de fonction s’utilisent pour créer de nouvelles mâchoires ainsi que pour copier et supprimer des mâchoires existantes.

2.2. Apport de modifications à des mâchoires à trois points
Ouvrez l’écran pour modifier des mâchoires à trois points.
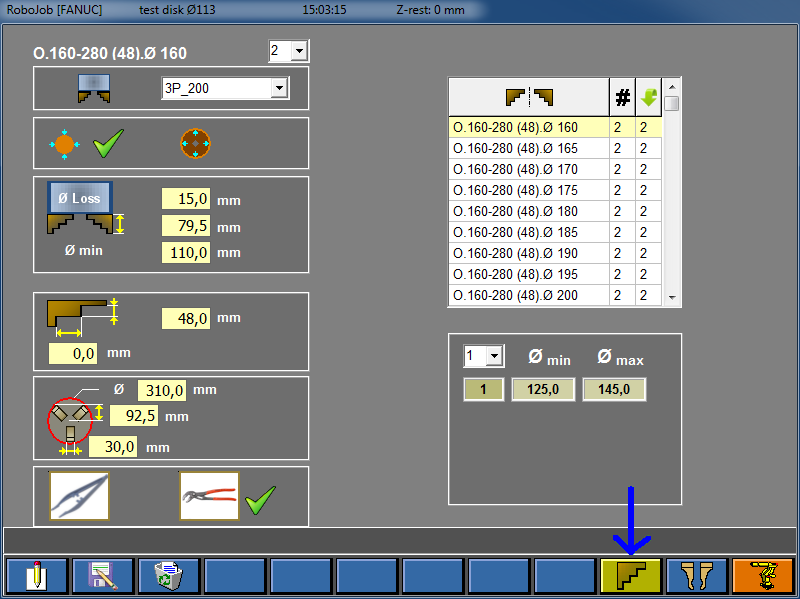
Le tableau qui s’affiche dans la partie droite de l’écran répertorie les mâchoires disponibles pour l’installation considérée.Les noms de ces mâchoires s’affichent dans la première colonne.Le nombre de jeux disponibles s’affiche dans la deuxième colonne. Un jeu de mâchoires en contient le nombre requis pour réaliser une pince de préhension.Les jeux conçus pour les mâchoires à trois points en comportent trois.
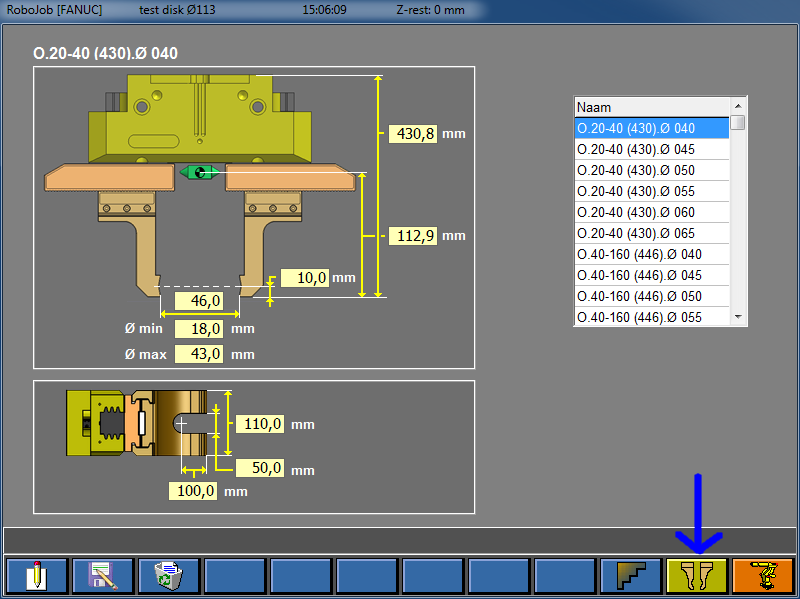
Sélectionnez une mâchoire dans le tableau pour en afficher les caractéristiques dans la partie gauche de l’écran.
Les caractéristiques de la mâchoire sélectionnée s’affichent dans la partie gauche de l’écran.Ces valeurs sont susceptibles d’être modifiées.
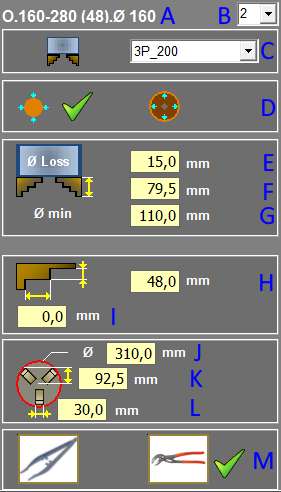
Le tableau ci-après permet d’appréhender la signification de ces champs.
| property | meaning |
|---|---|
|
A |
Dénomination de la mâchoire.Lors de la création d’une mâchoire, donnez-lui un nom pratique et parlant. |
|
B |
Nombre de jeux de mâchoires de cette nature disponibles pour l’installation. |
|
C |
Type de support auquel les mâchoires sont attachées.Servez-vous de la même valeur pour toutes les mâchoires dans la mesure où vous ne changerez vraisemblablement pas de support. |
|
D |
Pince de préhension externe ou interne.Cliquez sur l’icône correspondante pour changer de pince. |
|
E |
Dégagement le long de la course.Près de 3 mm pour les robots de petite taille, près de 15 mm pour les robots de grande taille. |
|
F |
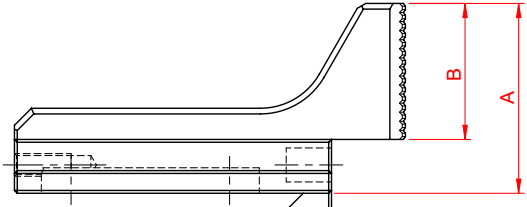
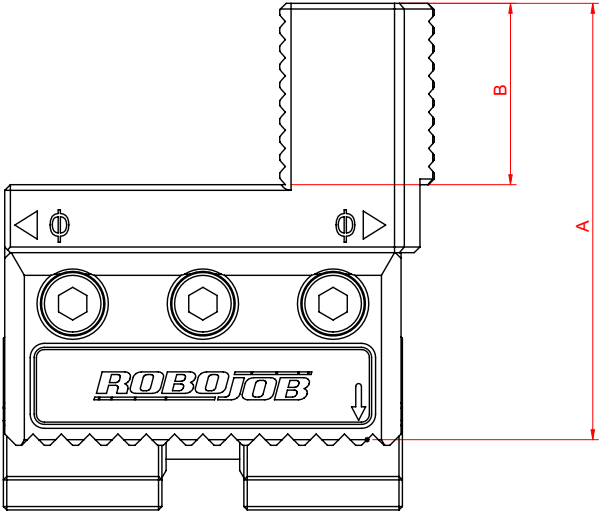
Hauteur de la mâchoire.Indiquée par A. |
|
G |
Diamètre minimal de la pince.Diamètre minimal effectif de la pince sans dégagement. |
|
H |
Hauteur de la pince de préhension.Hauteur de la partie préhension de la mâchoire.Si la pince de préhension présente une surface de butée, distance par rapport à cette surface.Cette valeur s’utilise pour calculer les paliers.Indiquée par B. |
|
I |
Longueur de la surface de butée.Nulle si la mâchoire est dépourvue de surface de butée.Cette valeur s’utilise pour calculer les paliers. |
|
J |
Cercle extérieur défini autour des mâchoires.Cercle maximal circonscrit aux mâchoires en position d’ouverture. |
|
K |
Valeur interférentielle d’empilement.Distance entre le centre de la pince de préhension et le bord extérieur des mâchoires en position d’ouverture. |
|
L |
Largeur des mâchoires. |
|
M |
Mâchoires tendres ou dures.Cliquez sur l’icône correspondante pour changer de mâchoires. |
Le côté inférieur droit de l’écran affiche certaines propriétés supplémentaires de la mâchoire sélectionnée sous le tableau de sélection des mâchoires.Ici, vous pouvez définir le nombre de pas de la mâchoire et le diamètre minimum et maximum que les mâchoires peuvent saisir.Sur la base des informations saisies, le logiciel calculera la portée effective que cette mâchoire est capable de saisir à chaque étape.
2.3. Apport de modifications à des mâchoires à deux points
Ouvrez l’écran pour modifier des mâchoires à deux points.Les mâchoires à deux points sont de différents types ; par conséquent, cet écran peut présenter un autre aspect sur différentes installations.
Le tableau qui s’affiche dans la partie droite de l’écran répertorie les mâchoires disponibles pour l’installation considérée.Le tableau répertorie les mâchoires par leur dénomination.
Sélectionnez une mâchoire dans le tableau pour en afficher les caractéristiques dans la partie gauche de l’écran.
Les caractéristiques de la mâchoire sélectionnée s’affichent dans la partie gauche de l’écran.Ces valeurs sont susceptibles d’être modifiées.
Le schéma permet de saisir la signification des valeurs affichées.
2.4. Essai des mâchoires réglées.
Après avoir ajouté ou modifié des mâchoires, procédez systématiquement à un essai à vitesse réduite pour vous assurer que les nouvelles valeurs sont correctes.
3. Comment obtenir de l’aide supplémentaire
N’hésitez pas à nous contacter lorsque vous avez besoin d’une assistance supplémentaire au-delà des documents fournis dans la base de connaissances du service RoboJob.
Vous pouvez contacter le service RoboJob Service en utilisant les moyens suivants:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Téléphone: +32 15 70 89 70
Nous vous prions de bien vouloir nous fournir les informations suivantes:
-
Numèro de sèrie xx-xx-xxx
-
Description de l’erreur ou de la piëce dèfectueuse
-
Message ou code d’erreur exact
-
Qu’a fait le robot
-
Qu’Ètait-il supposè faire
-
Photos ou vidèos
Vous pouvez nous envoyer ces informations par e-mail.Pour envoyer des fichiers volumineux, vous pouvez utiliser un service de transfert de fichiers comme WeTransfer: robojob.wetransfer.com.
Une confirmation automatique vous sera envoyée dès réception de votre courrier.