Modification de la hauteur de préhension maximale - Turn-Assist
|
La hauteur de préhension des mâchoires est limitée au sein du logiciel afin de prévenir les collisions ; mais dans certaines conditions, une préhension plus profonde que celle autorisée par le logicielle est envisageable.Exécutez la procédure indiquée dans ce document pour augmenter la hauteur de préhension maximale. 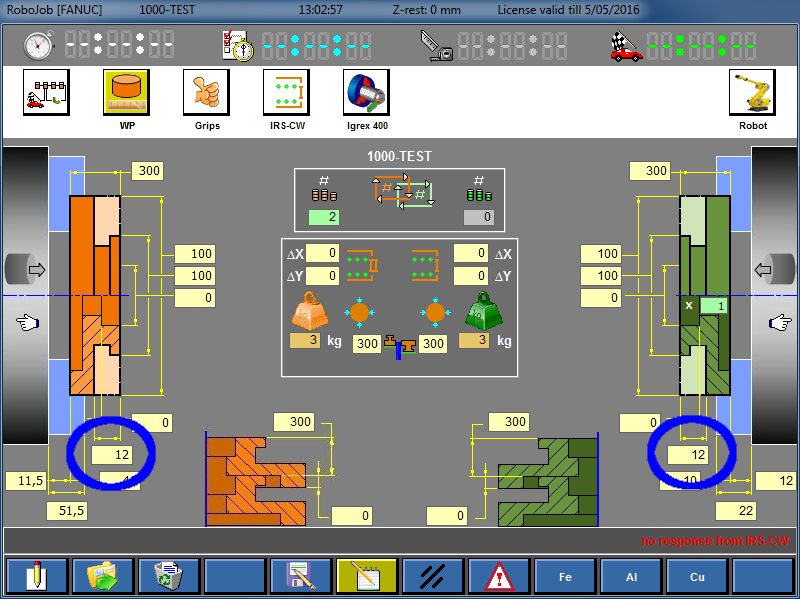
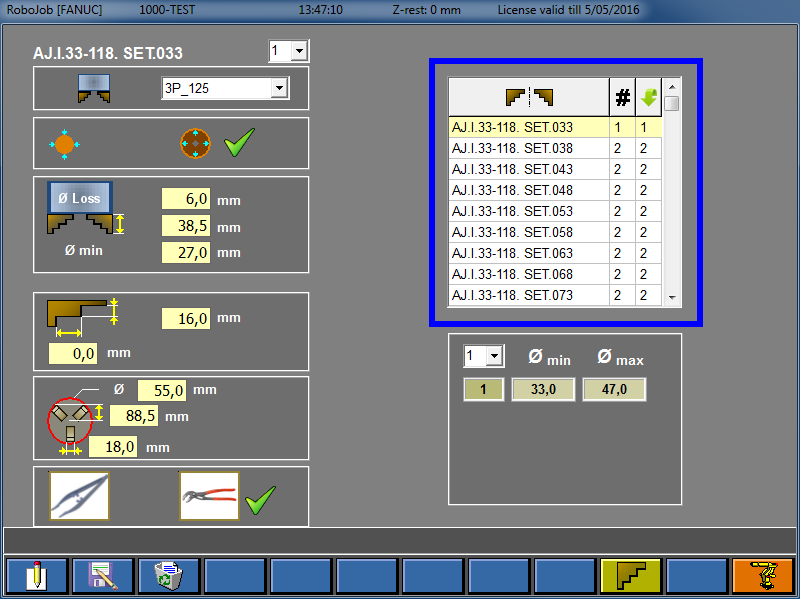
Figure 1. grip height value
|
|
La hauteur de préhension maximale est limitée au sein du logiciel afin de prévenir toute collision entre la pince de préhension et la pièce à travailler.Si vous modifiez ces limites, vous devez également vous assurer que la pince concernée est à même de se saisir d’une pièce à travailler aux profondeurs concernées. Certains dispositifs tels qu’un pousseur de pièces ou un préhenseur progressif sont susceptibles de limiter la hauteur de préhension. |
1. Servez-vous des outils suivants
|
|

2. Procédure
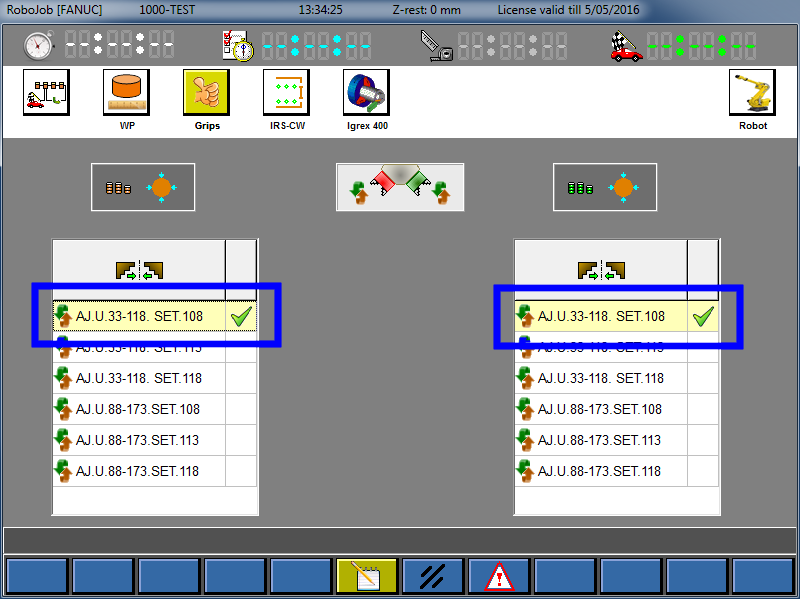
2.1. Démarrez le logiciel Turn Assist et vérifiez quelles sont les mâchoires utilisées
2.2. Ouvrez le menu de paramétrage du robot
Cliquez sur l’icône Paramètres.
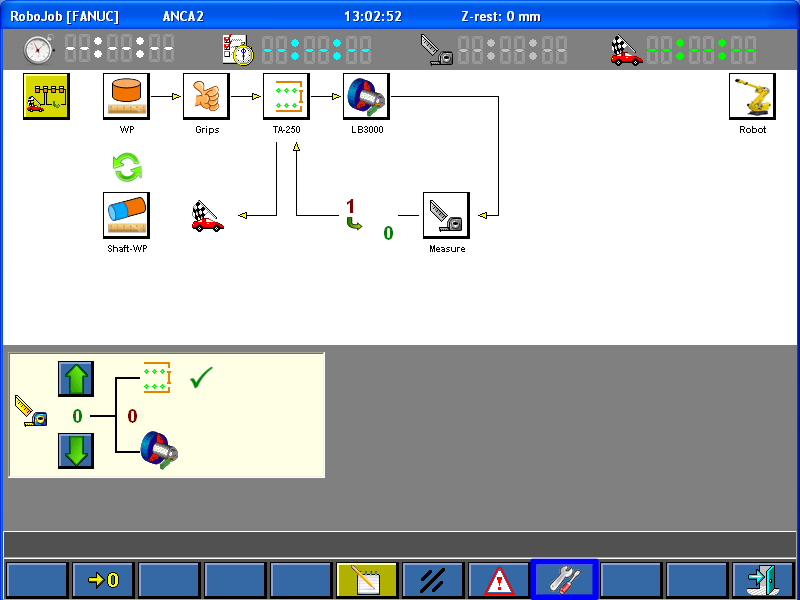
Cliquez sur l’icône Robot.
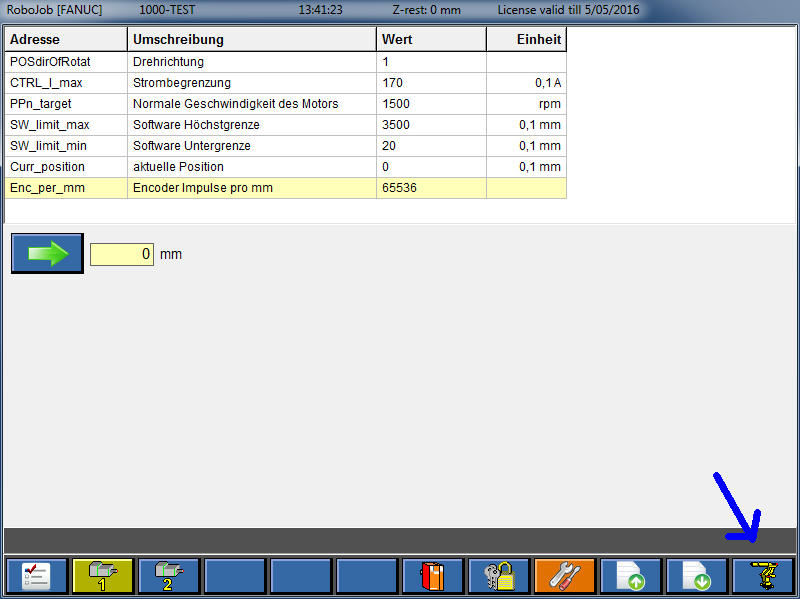
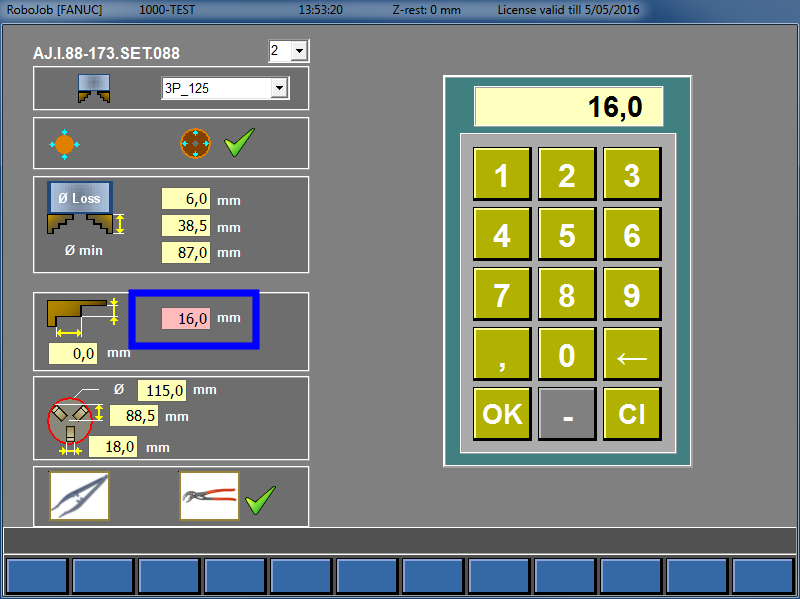
2.3. Modifiez la hauteur de préhension maximale des mâchoires
Sélectionnez les mâchoires indiquées lors de la 1ère étape.
Modifiez la hauteur maximale de la pince de préhension pour les mâchoires sélectionnées.Cliquez sur le champ correspondant, entrez la nouvelle valeur, puis cliquez sur OK pour confirmer.
2.4. Redémarrez le logiciel Turn-Assist
Pour activer les modifications, vous devez redémarrer le logiciel en le fermant et en le rouvrant.
3. Comment obtenir de l’aide supplémentaire
N’hésitez pas à nous contacter lorsque vous avez besoin d’une assistance supplémentaire au-delà des documents fournis dans la base de connaissances du service RoboJob.
Vous pouvez contacter le service RoboJob Service en utilisant les moyens suivants:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Téléphone: +32 15 70 89 70
Nous vous prions de bien vouloir nous fournir les informations suivantes:
-
Numèro de sèrie xx-xx-xxx
-
Description de l’erreur ou de la piëce dèfectueuse
-
Message ou code d’erreur exact
-
Qu’a fait le robot
-
Qu’Ètait-il supposè faire
-
Photos ou vidèos
Vous pouvez nous envoyer ces informations par e-mail.Pour envoyer des fichiers volumineux, vous pouvez utiliser un service de transfert de fichiers comme WeTransfer: robojob.wetransfer.com.
Une confirmation automatique vous sera envoyée dès réception de votre courrier.