SRVO-038 Disparité impulsionnelle
|
Ce document décrit comment récupérer d’une alarme SRVO-038 Pulse mismatch.L’alarme est déclenchée lorsque le nombre d’impulsions du codeur détecté à la mise sous tension est différent de celui mémorisé à la mise hors tension. Cela peut se produire lorsque la valeur du codeur d’impulsions stockée est modifiée, par exemple en chargeant une sauvegarde.L’erreur peut également être déclenchée lorsque le robot est déplacé alors qu’il est éteint, cela peut se produire lorsque le frein de maintien est défectueux sur l’un des axes. |
1. Servez-vous des outils suivants
|
|

2. Procédure
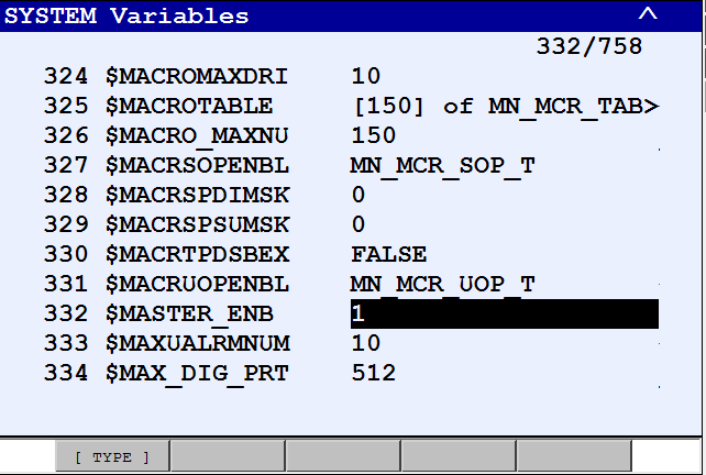
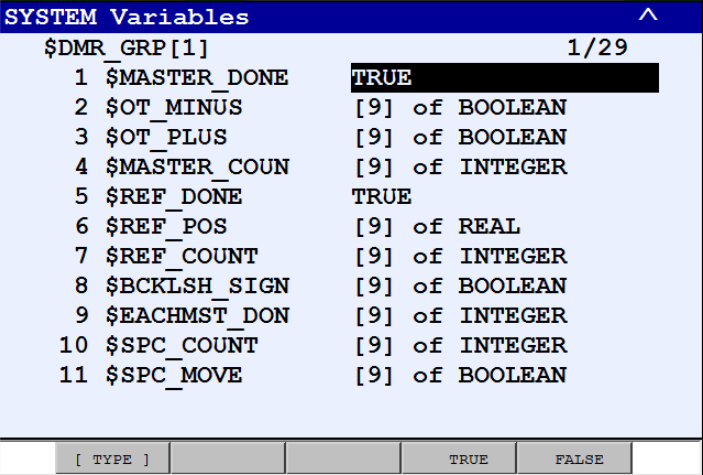
2.3. Définissez le paramètre Master done sur true
MENU > NEXT > SYSTEM > VARIABELE,$DMR_GRP[1].$MASTER_DONE = TRUE
|
Vérifiez si la variable demeure TRUE [VRAI], sinon réitérez l’opération RES_PCA |
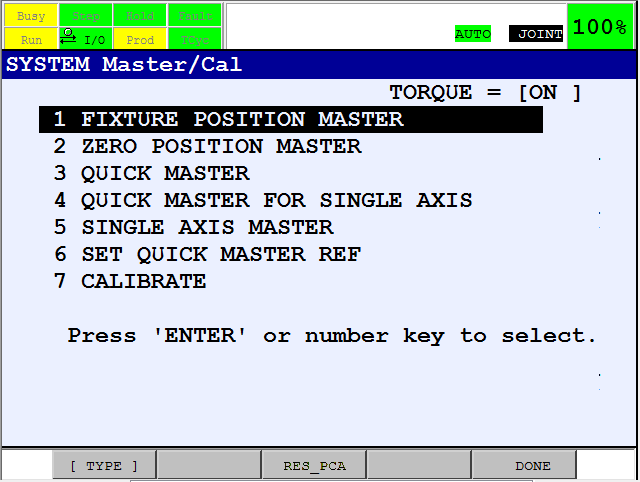
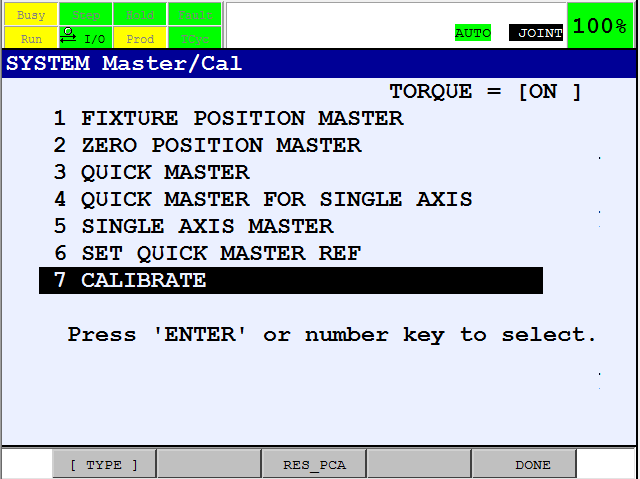
2.4. Calibrer le robot
MENU > NEXT > SYSTEM > MASTER/CALL, CALIBRATE
|
Confirmez par YES [OUI] et assurez-vous que l’écran affiche la mention « ROBOT CALIBRATED » [ROBOT ÉTALONNÉ] |
3. Comment obtenir de l’aide supplémentaire
N’hésitez pas à nous contacter lorsque vous avez besoin d’une assistance supplémentaire au-delà des documents fournis dans la base de connaissances du service RoboJob.
Vous pouvez contacter le service RoboJob Service en utilisant les moyens suivants:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Téléphone: +32 15 70 89 70
Nous vous prions de bien vouloir nous fournir les informations suivantes:
-
Numèro de sèrie xx-xx-xxx
-
Description de l’erreur ou de la piëce dèfectueuse
-
Message ou code d’erreur exact
-
Qu’a fait le robot
-
Qu’Ètait-il supposè faire
-
Photos ou vidèos
Vous pouvez nous envoyer ces informations par e-mail.Pour envoyer des fichiers volumineux, vous pouvez utiliser un service de transfert de fichiers comme WeTransfer: robojob.wetransfer.com.
Une confirmation automatique vous sera envoyée dès réception de votre courrier.