Ramener manuellement le robot à sa position initiale - Multi-Assist
|
La position qu’occupe le robot est inconnue et son retour automatique à sa position initiale s’avère impossible.Exécutez cette procédure pour ramener le robot à sa position initiale. |
|
Essayez d’abord d’utiliser la fonction de retour à la position initiale dans le menu du robot.Cette procédure ne devrait être utilisée que dans le cas exceptionnel où le robot n’est pas en mesure de retourner automatiquement dans sa position initiale. |
1. Servez-vous des outils suivants
|
|
|
|


2. Procédure
2.1. Passage du robot en mode manuel
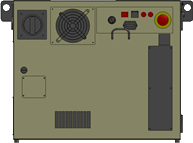
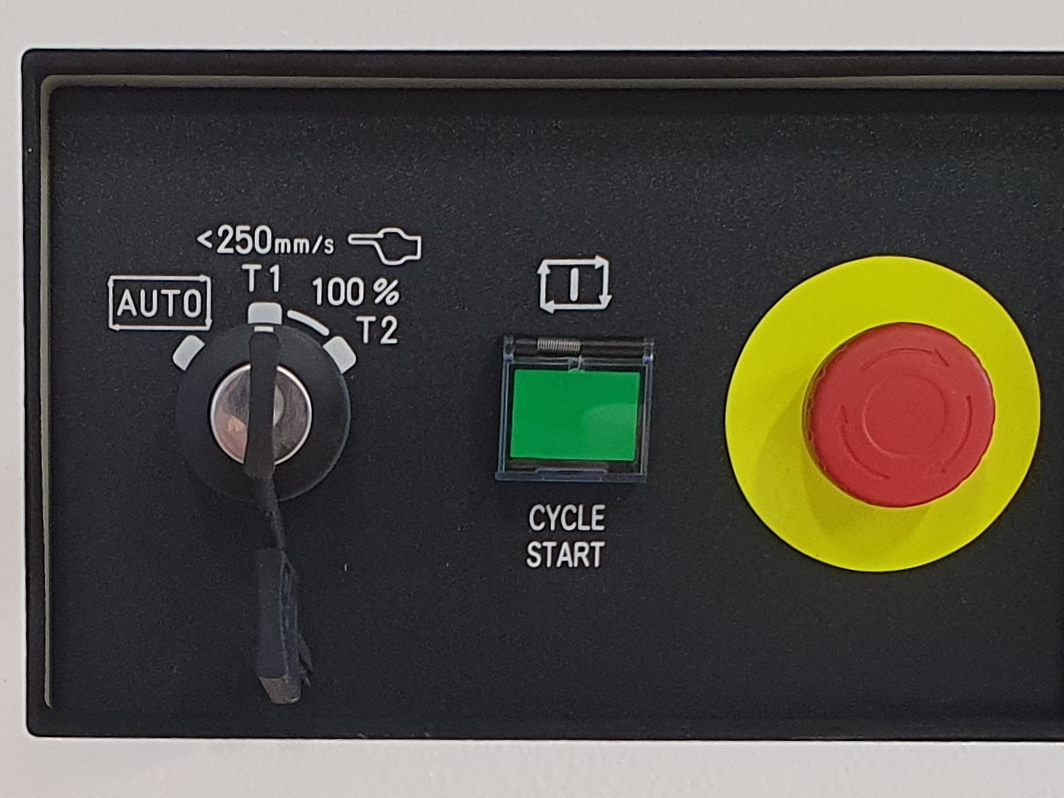
Amenez le commutateur à trois positions de l’unité de commande du robot sur la position T1-Mode.
Amenez le commutateur à deux positions du Teach Pendant sur la position On-Mode.

2.2. Activation du déplacement manuel
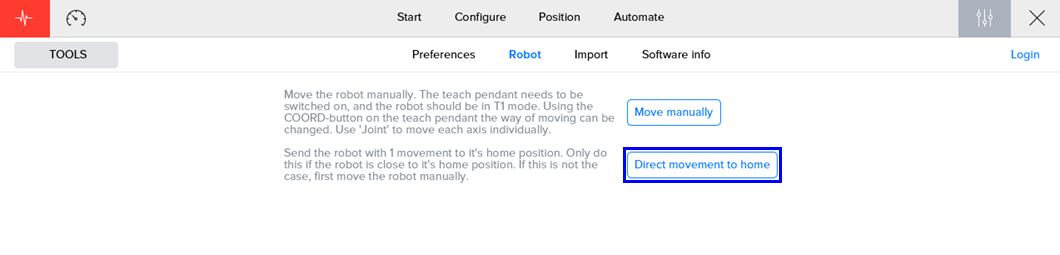
Sur l’IPC, ouvrez le logiciel, puis accédez à l’écran de paramétrage.
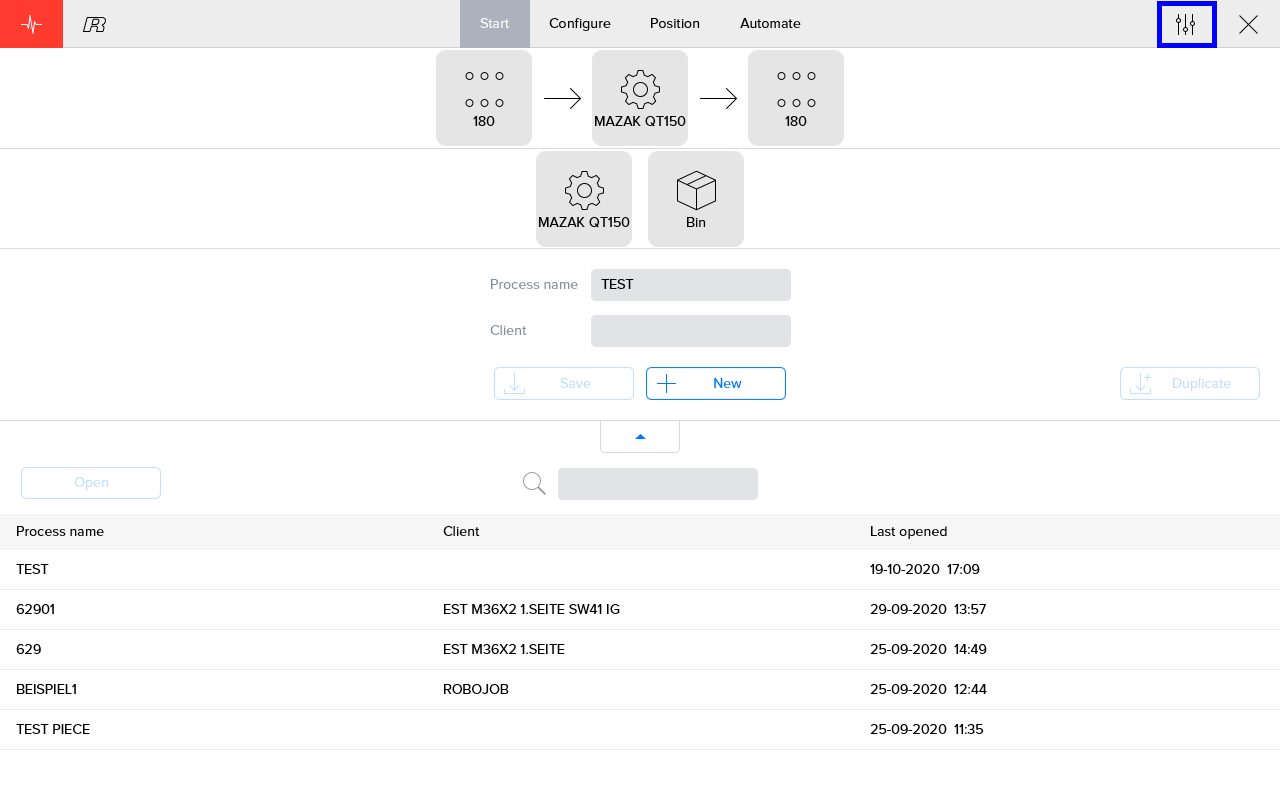
Ouvrez les paramètres du robot.

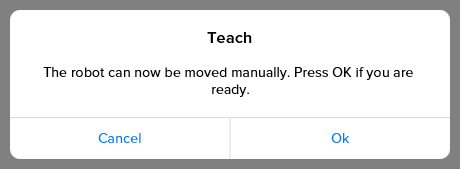
Cliquez sur le bouton pour déplacer manuellement le robot.
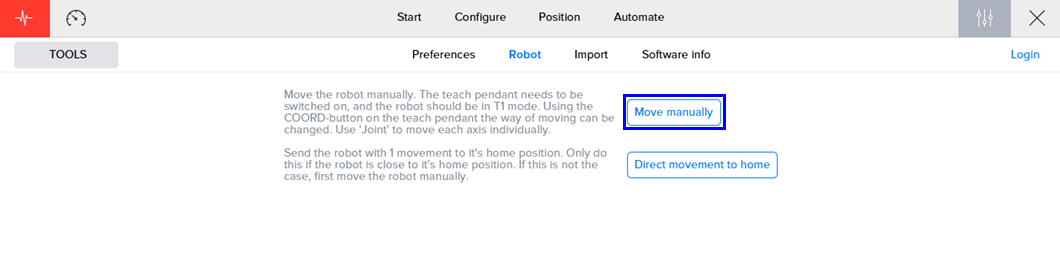
Rien ne s’oppose au déplacement manuel du robot lorsque cette fenêtre contextuelle est ouverte.
2.3. Réinitialiser tous les défauts
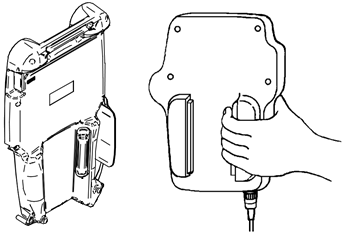
Pour déplacer le robot en toute sécurité, un interrupteur homme-mort situé à l’arrière du Teach Pendant doit être en position centrale
Les deux interrupteurs homme-mort ont 3 positions :
-
Pas pressée
-
Une position intermédiaire sûre
-
Entièrement pressée
Essayez si vous pouvez sentir les trois positions.Pour pouvoir réinitialiser l’erreur et déplacer le robot, un seul des deux interrupteurs homme-mort doit être en position centrale de sécurité.Alors ne poussez pas trop fort ou trop doucement !
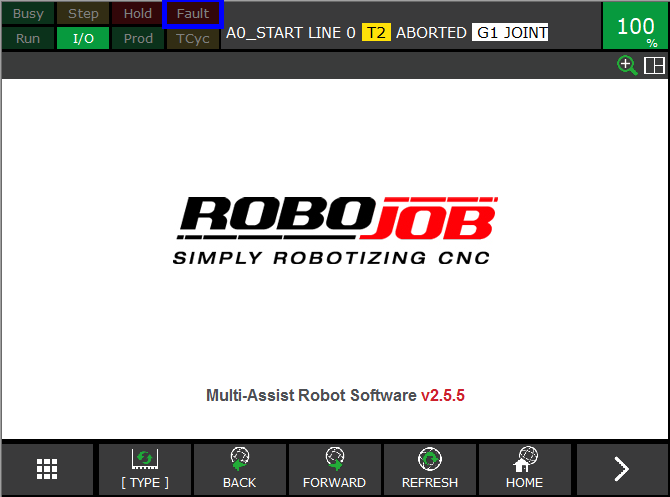
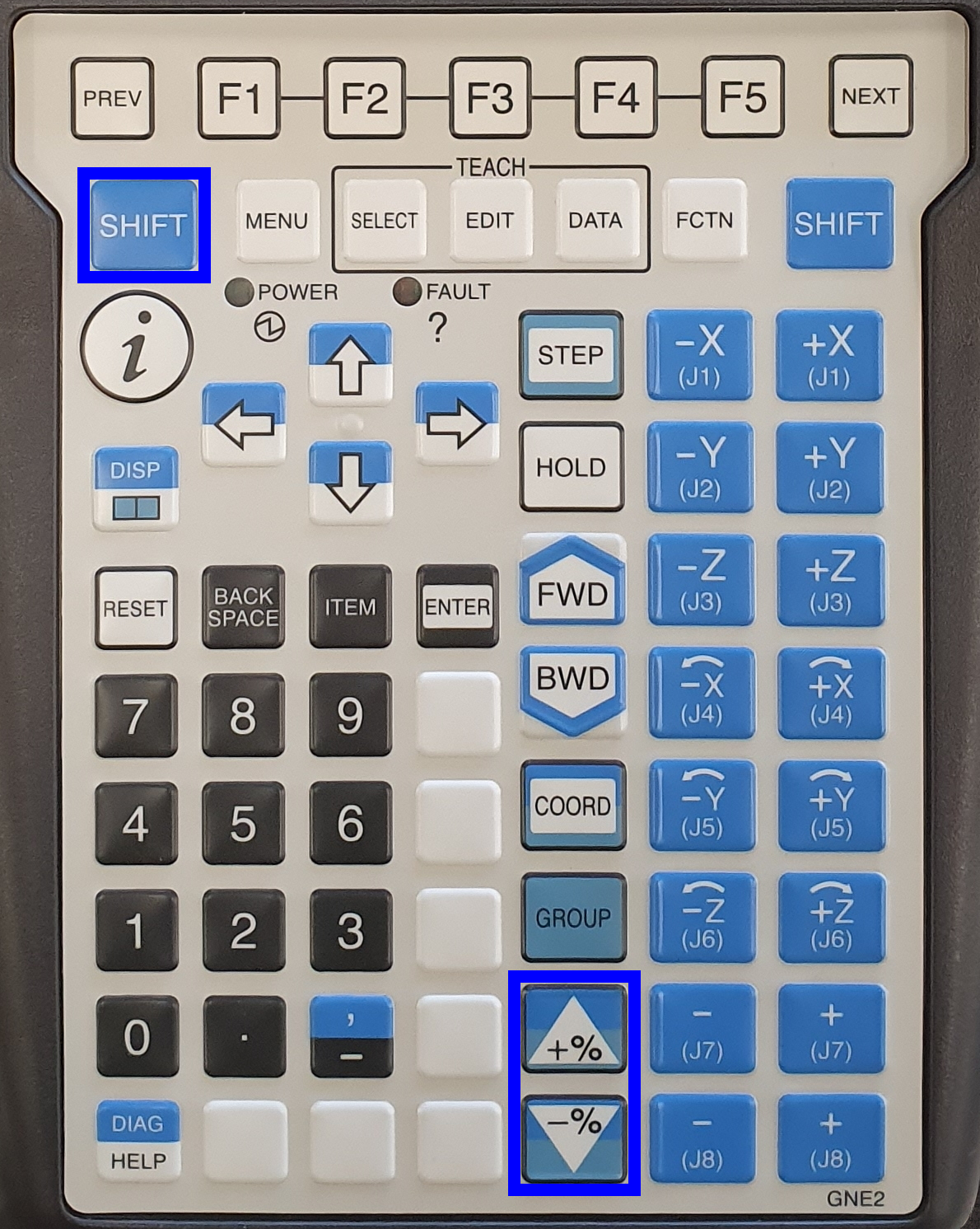
Appuyez sur la bouton SHIFT en même temps que sur la bouton RESET pour effacer tous les défauts.
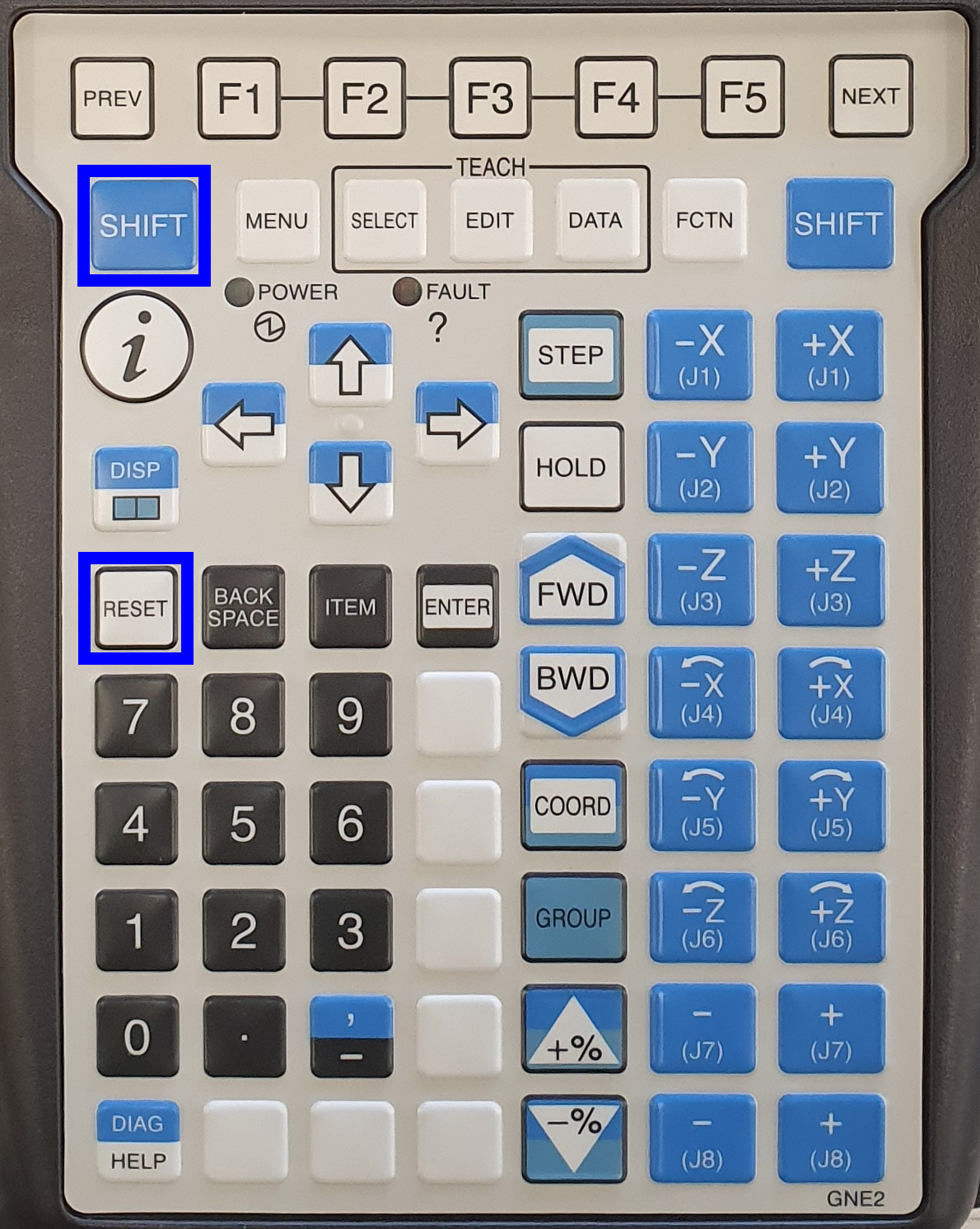
The fault indicator on the top of the teach pendant should become inactive.
2.4. Mettre le groupe de motions à 1
Selon la version du robot, le ' Group ' doit être réglé sur 1.Le groupe 1 déplacera le robot, les groupes 2 et 3 déplaceront les tables. Si votre robot est équipé d’une pince servo, les groupes 2 et 3 sont utilisés respectivement pour les pinces A et B.
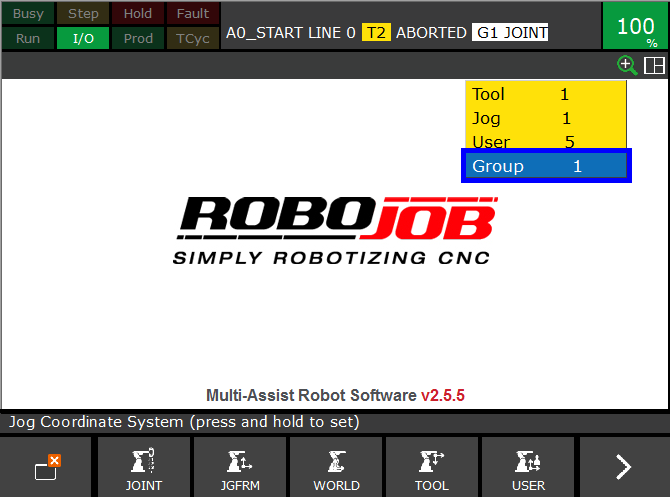
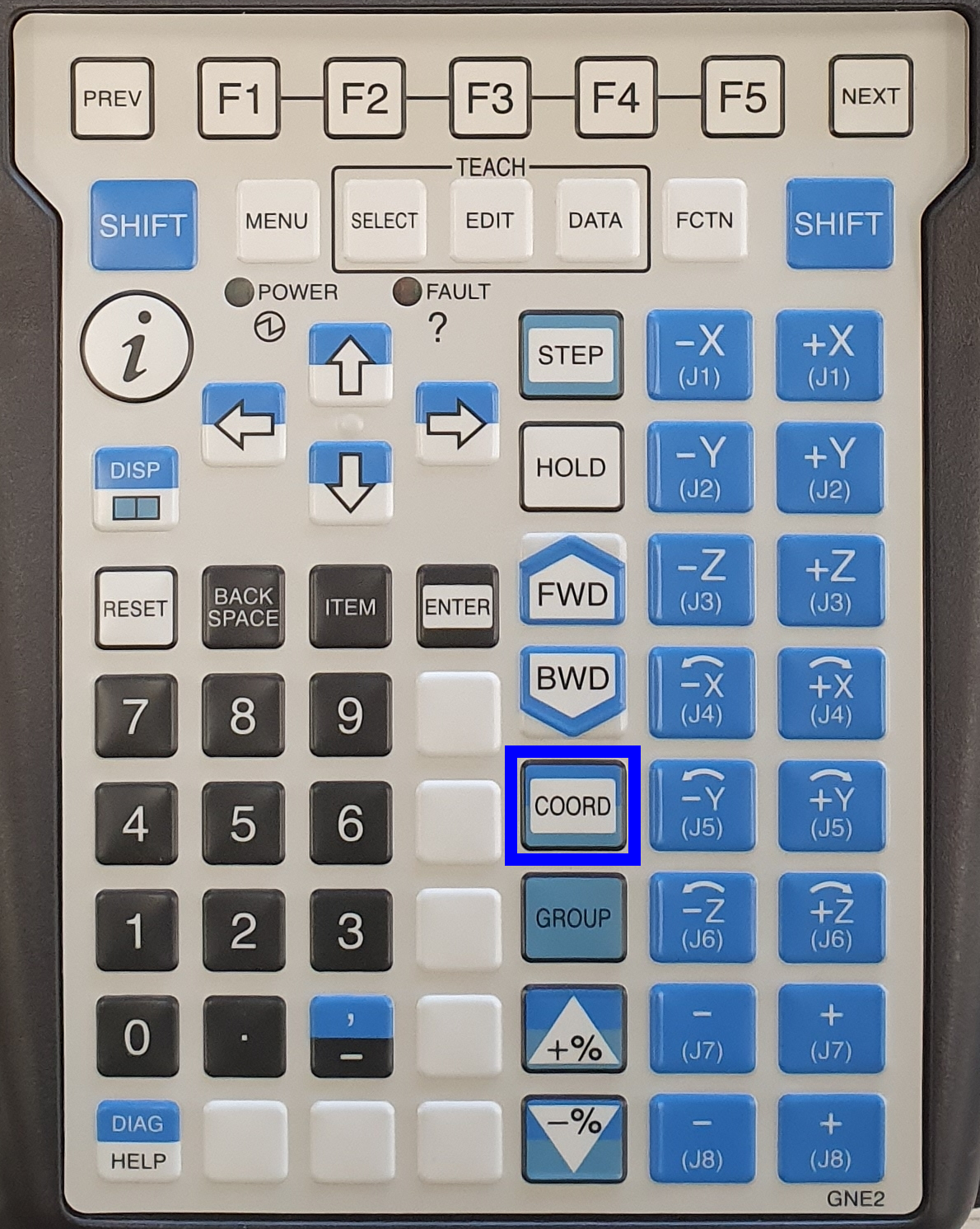
Pour vérifier si le groupe est défini sur un seul appui sur SHIFT + COORD (en même temps), une petite fenêtre apparaîtra dans le coin supérieur droit de l’écran.Appuyez sur la flèche vers le bas jusqu’à ce que ' group ' soit mis en lumière.
|
Si vous ne voyez pas Groupe dans ce menu, appuyez sur le bouton PREV pour quitter le menu et passer à l’étape suivante.Le tool, jog et user numbers sur votre écran peuvent être différents de ceux des images ci-dessous, c’est normal. |
Lorsque vous vous trouvez sur le group (surligné en bleu), appuyez sur le bouton '1' et appuyez sur ENTER.Le petit menu disparaîtra.
Now you are able to move the robot.
2.5. Déplacer le robot manuellement
|
Veillez à ce que le robot ne touche rien pendant le mouvement.Faites attention aux autres personnes, aux machines environnantes, aux autres objets et au robot lui-même.Assurez-vous que les câbles autour du robot ne soient pas endommagés. |
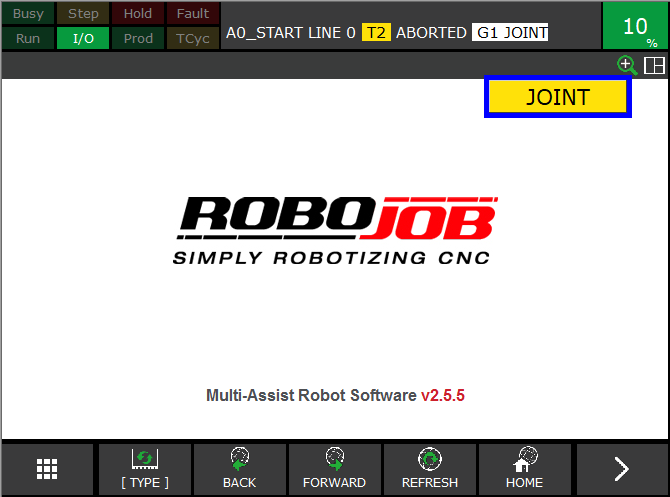
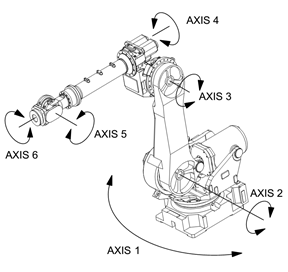
Appuyez sur COORD pour modifier le mode de déplacement.Appuyez sur la touche jusqu’à ce que l’option JOINT soit sélectionnée.Le mode de mouvement JOINT est le plus facile à utiliser.Vous pouvez déplacer les joints un par un.
Press SHIFT + ±J1-8 to move the robot.
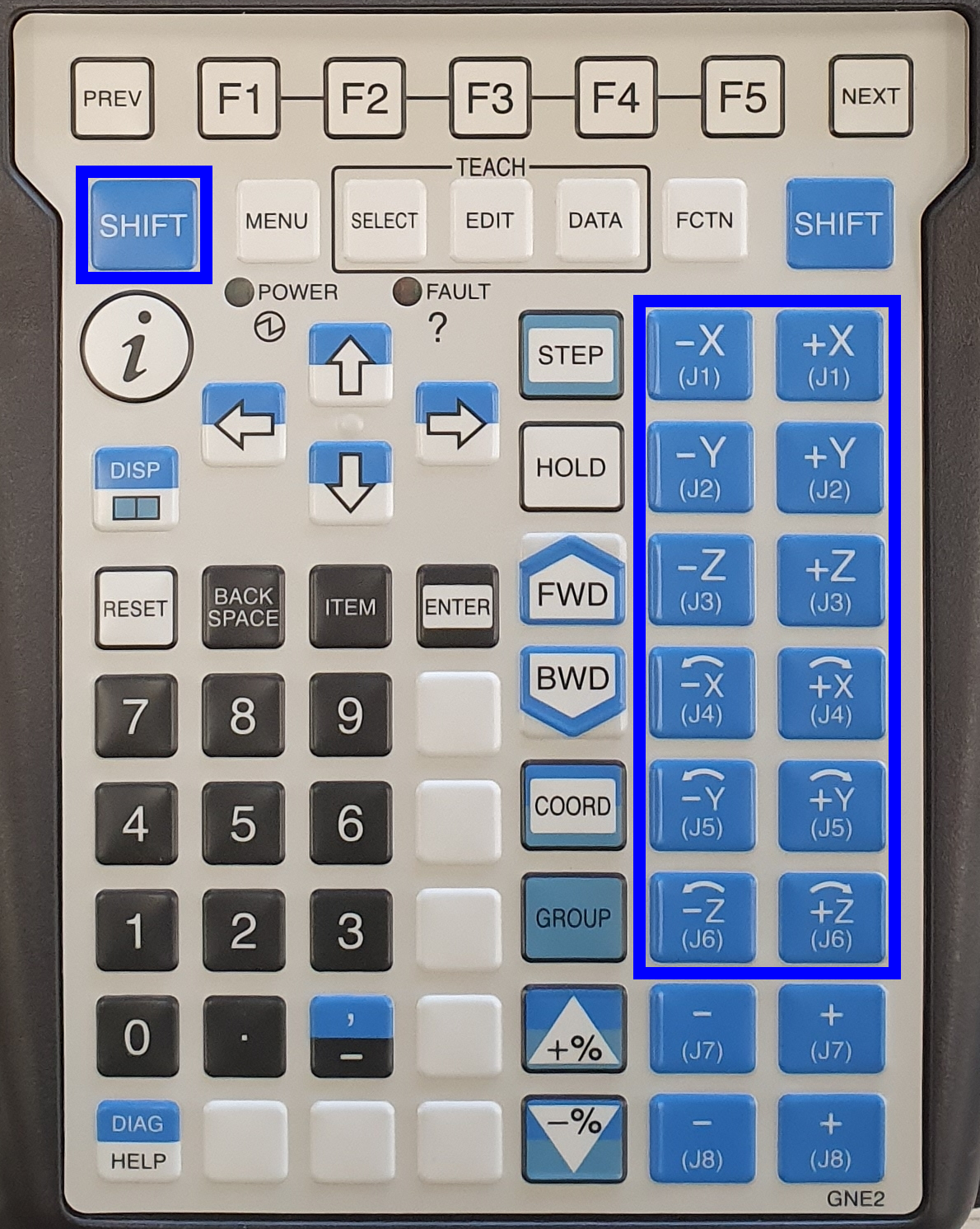
Appuyez sur SHIFT + +% ou -% pour ajuster la vitesse.
2.6. Retour à la position initiale
Quittez la boîte de dialogue pour achever manuellement le déplacement.
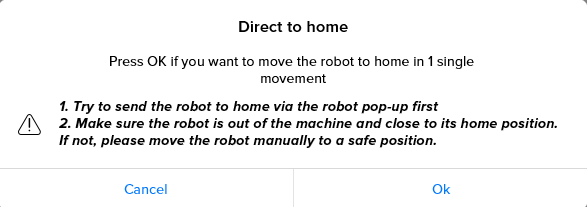
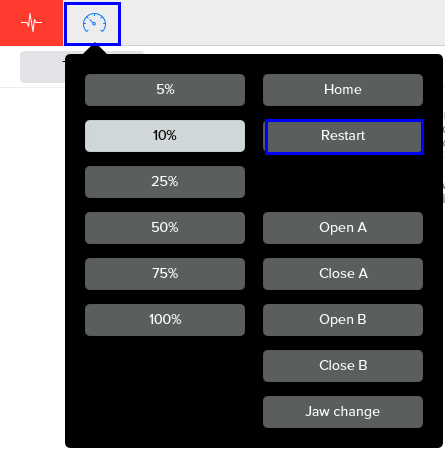
Cliquez sur le bouton pour exécuter un retour direct à la position initiale.
Confirmez que vous souhaitez l’exécution d’un retour direct à la position initiale.Ne perdez pas de vue que vous pouvez interrompre à tout moment ce déplacement en relâchant les commutateurs homme mort, mais que le robot continuera à se déplacer après la levée des anomalies.
Le robot reviendra à sa position initiale précise. Patientez jusqu’à l’achèvement du déplacement entamé.
En cas d’échec de ce retour direct ou d’annulation complète de ce déplacement, revenez au menu Robot et cliquez sur le bouton de redémarrage.
2.7. Retour au mode automatique
Mettez l’interrupteur à trois positions du l’unité de commande du robot sur AUTO.

Mettez l’interrupteur à deux positions du Teach Pendant sur Off.

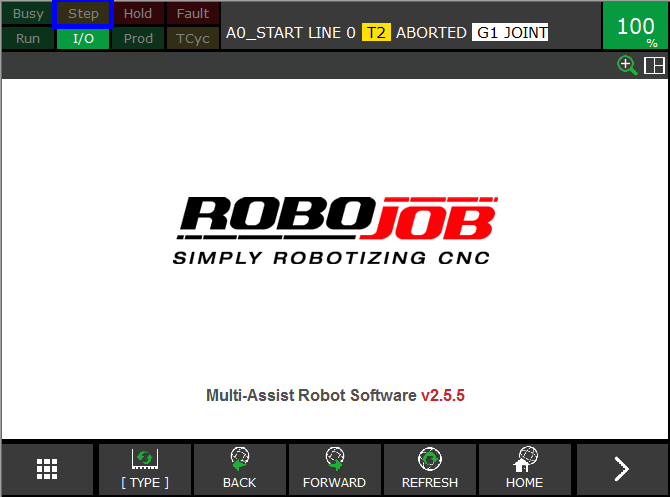
Assurez-vous que le mode Step est inactif. Utilisez le bouton STEP pour changer de mode.
3. Comment obtenir de l’aide supplémentaire
N’hésitez pas à nous contacter lorsque vous avez besoin d’une assistance supplémentaire au-delà des documents fournis dans la base de connaissances du service RoboJob.
Vous pouvez contacter le service RoboJob Service en utilisant les moyens suivants:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Téléphone: +32 15 70 89 70
Nous vous prions de bien vouloir nous fournir les informations suivantes:
-
Numèro de sèrie xx-xx-xxx
-
Description de l’erreur ou de la piëce dèfectueuse
-
Message ou code d’erreur exact
-
Qu’a fait le robot
-
Qu’Ètait-il supposè faire
-
Photos ou vidèos
Vous pouvez nous envoyer ces informations par e-mail.Pour envoyer des fichiers volumineux, vous pouvez utiliser un service de transfert de fichiers comme WeTransfer: robojob.wetransfer.com.
Une confirmation automatique vous sera envoyée dès réception de votre courrier.