Mettre en œuvre une préhension intérieure - Multi-Assist
|
Ce document décrit comment configurer le logiciel de préhension intérieure. |
1. Servez-vous des outils suivants
|
|

2. Procédure
2.1. Nécessité de mâchoires intérieures
Les pièces à usiner ne peuvent être saisies à l’intérieur qu’avec des mâchoires configurées pour une préhension intérieure. Avant de commencer, vérifiez la disponibilité de mâchoires intérieures.
Accédez aux paramètres, sélectionnez CONFIG (Configuration) et accédez à Jawsets (Jeux de mâchoires).Vous pouvez, sur cet écran, définir de nouvelles mâchoires ou modifier les mâchoires existantes.Pour plus de détails sur la configuration des mâchoires, reportez-vous au manuel de l’utilisateur.
Sélectionnez une mâchoire dans le menu déroulant en haut à gauche.Dans l’onglet « Shape » (Forme), vous pouvez définir la forme de la mâchoire.La forme des mâchoires définit la manière de les utiliser.En regard des mesures, il est précisé si la surface peut être utilisée pour la préhension intérieure ou extérieure.Cette information est indiquée par un « I » pour intérieur (inner) et un « O » pour extérieur (outer).
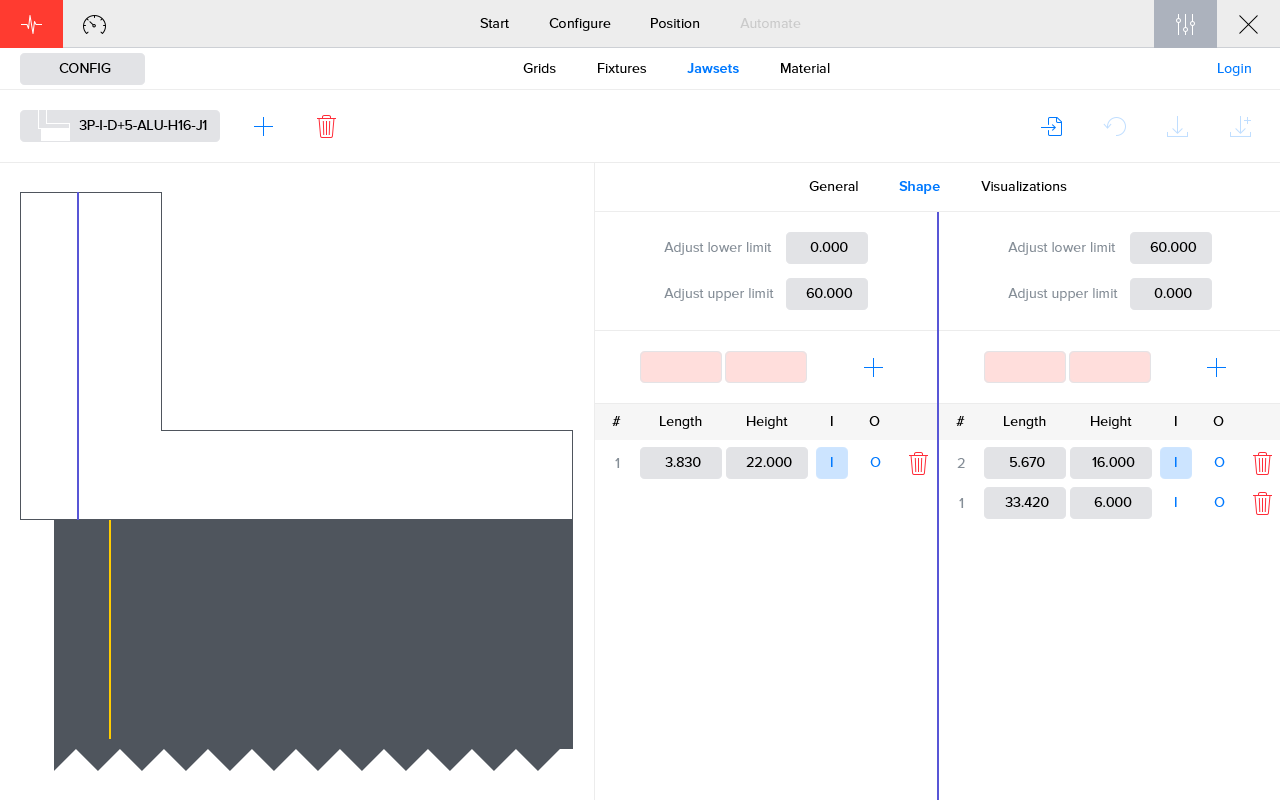
|
Le nom de la mâchoire vous indique souvent si la mâchoire est destinée à une préhension extérieure ou intérieure.Par exemple « 3P-E-D+0-ST-H16-J1 » correspond à une préhension extérieure tandis que « 3P-I-D+5-ST-H16-J1 » correspond à une préhension intérieure. |
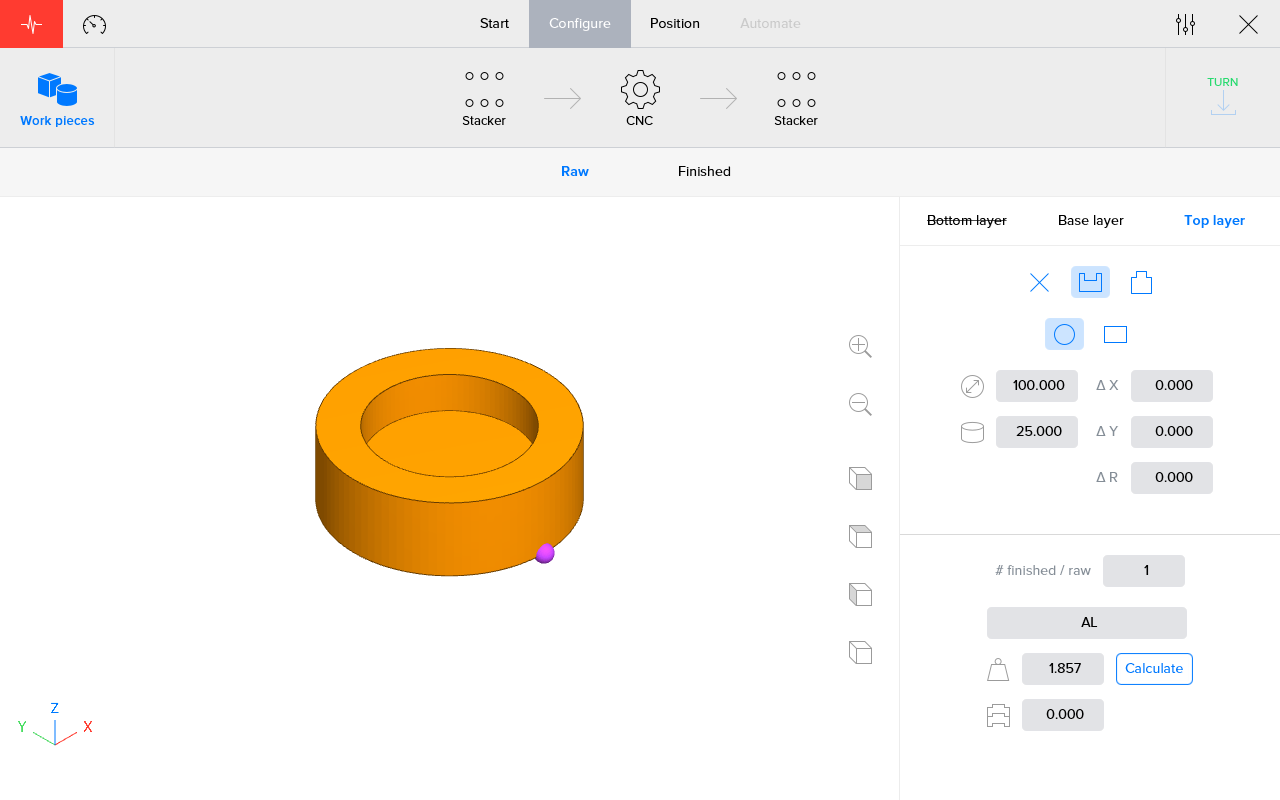
2.2. Définition de la pièce à usiner avec couche intérieure
Assurez-vous de définir une couche supérieure ou inférieure avec une découpe afin de permettre une préhension intérieure.La découpe doit avoir une largeur et une profondeur suffisantes pour que les mâchoires puissent s’y adapter.
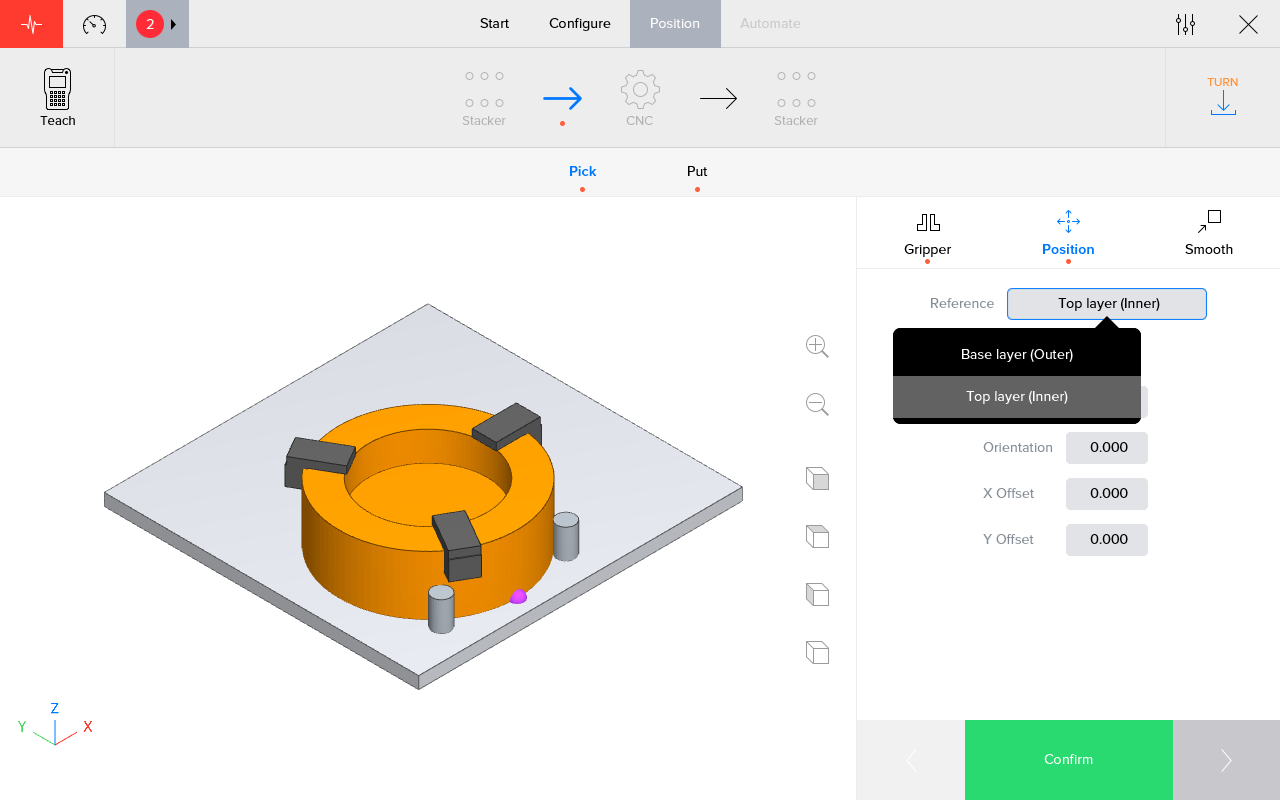
2.3. Sélection de la couche intérieure pour le positionnement.
Pendant le positionnement, accédez à l’étape durant laquelle la pièce doit être enlevée par l’intérieur.Dans l’onglet « Position » (Positionnement), modifiez la référence à la couche avec la découpe.La couche de référence déterminera la manière de positionner la pièce à usiner.Elle définit la préhension extérieure ou intérieure de la pièce.
Il est possible dans ce cas que la représentation donne un résultat étrange.Les mâchoires de la pince de préhension doivent encore être remplacées par les mâchoires qui permettent la préhension intérieure.
2.4. Sélection des mâchoires intérieures
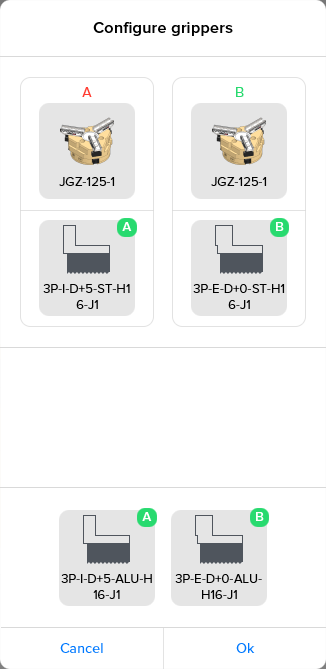
Accédez à l’onglet « Gripper » (Pince de préhension) et appuyez sur le bouton « Configure » (Configuration) afin de procéder à la configuration des mâchoires de la pince de préhension.
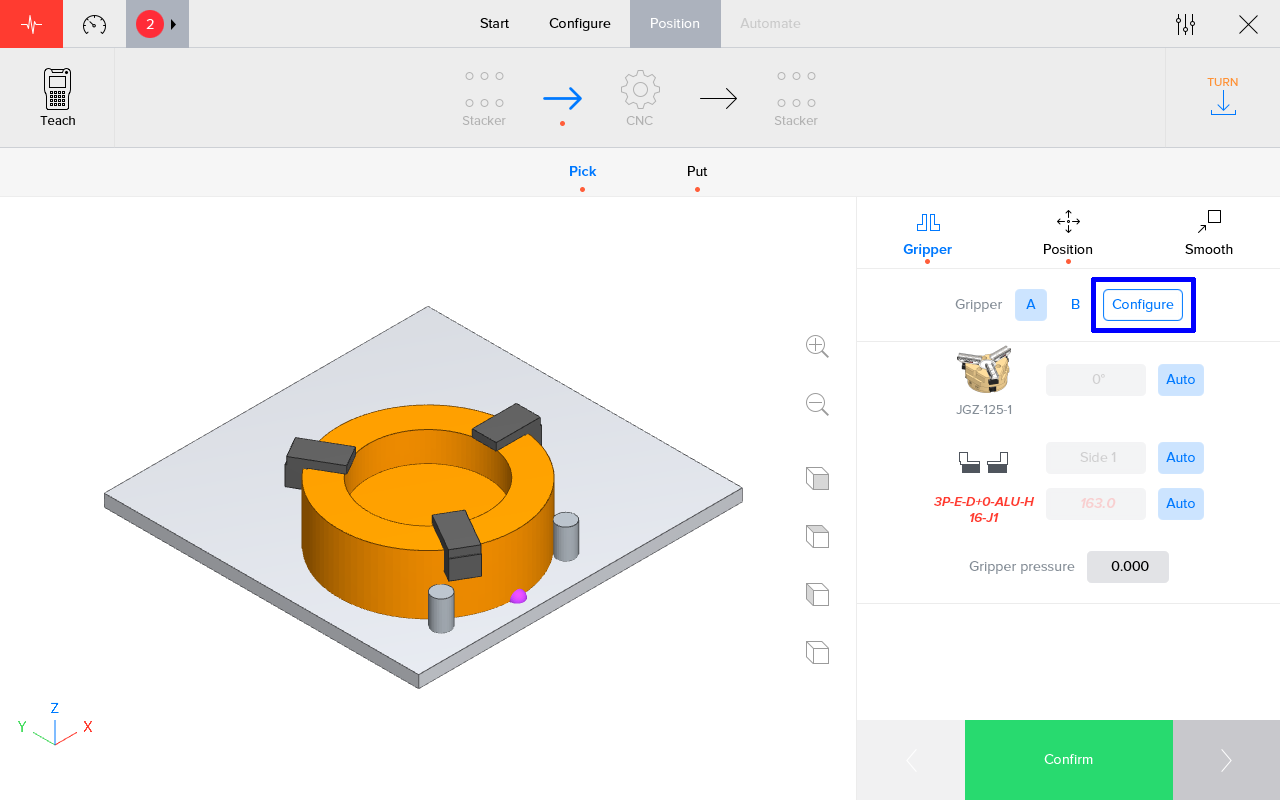
Remplacez les mâchoires par les mâchoires de préhension intérieure appropriées.Le logiciel indique en vert les mâchoires adaptées à chaque pince de préhension.Glissez et déposez les mâchoires que vous souhaitez utiliser.
2.5. Automatisation
Vérifiez et confirmez les positionnements.Démarrez le processus.Les pièces à usiner doivent être saisies à l’intérieur selon la configuration établie.
3. Comment obtenir de l’aide supplémentaire
N’hésitez pas à nous contacter lorsque vous avez besoin d’une assistance supplémentaire au-delà des documents fournis dans la base de connaissances du service RoboJob.
Vous pouvez contacter le service RoboJob Service en utilisant les moyens suivants:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Téléphone: +32 15 70 89 70
Nous vous prions de bien vouloir nous fournir les informations suivantes:
-
Numèro de sèrie xx-xx-xxx
-
Description de l’erreur ou de la piëce dèfectueuse
-
Message ou code d’erreur exact
-
Qu’a fait le robot
-
Qu’Ètait-il supposè faire
-
Photos ou vidèos
Vous pouvez nous envoyer ces informations par e-mail.Pour envoyer des fichiers volumineux, vous pouvez utiliser un service de transfert de fichiers comme WeTransfer: robojob.wetransfer.com.
Une confirmation automatique vous sera envoyée dès réception de votre courrier.