Compenser la position en utilisant les Décalages X et Y - Multi-Assist
|
Le robot est mal aligné et présente une erreur de position lors du prélèvement des pièces sur la table.Ce document décrit comment compenser l’erreur de position.Notez qu’il s’agit d’une solution temporaire et qu’une intervention d’un technicien RoboJob est nécessaire pour mesurer à nouveau le cadre utilisateur de la table. |
- 1. Servez-vous des outils suivants
-
2. Procédure
- 2.1. Réglage des décalages requis pour prélever une pièce de la table
- 2.2. Réglage des décalages requis pour déposer la pièce dans le mandrin
- 2.3. Réglage des décalages requis pour prélever la pièce du mandrin
- 2.4. Réglage des décalages requis pour déposer la pièce à usiner sur la table
- 2.5. Approche générale
- 2.6. Autres méthodes
- 2.7. Solution permanente
- 3. Comment obtenir de l’aide supplémentaire
1. Servez-vous des outils suivants
|
|

2. Procédure
2.1. Réglage des décalages requis pour prélever une pièce de la table
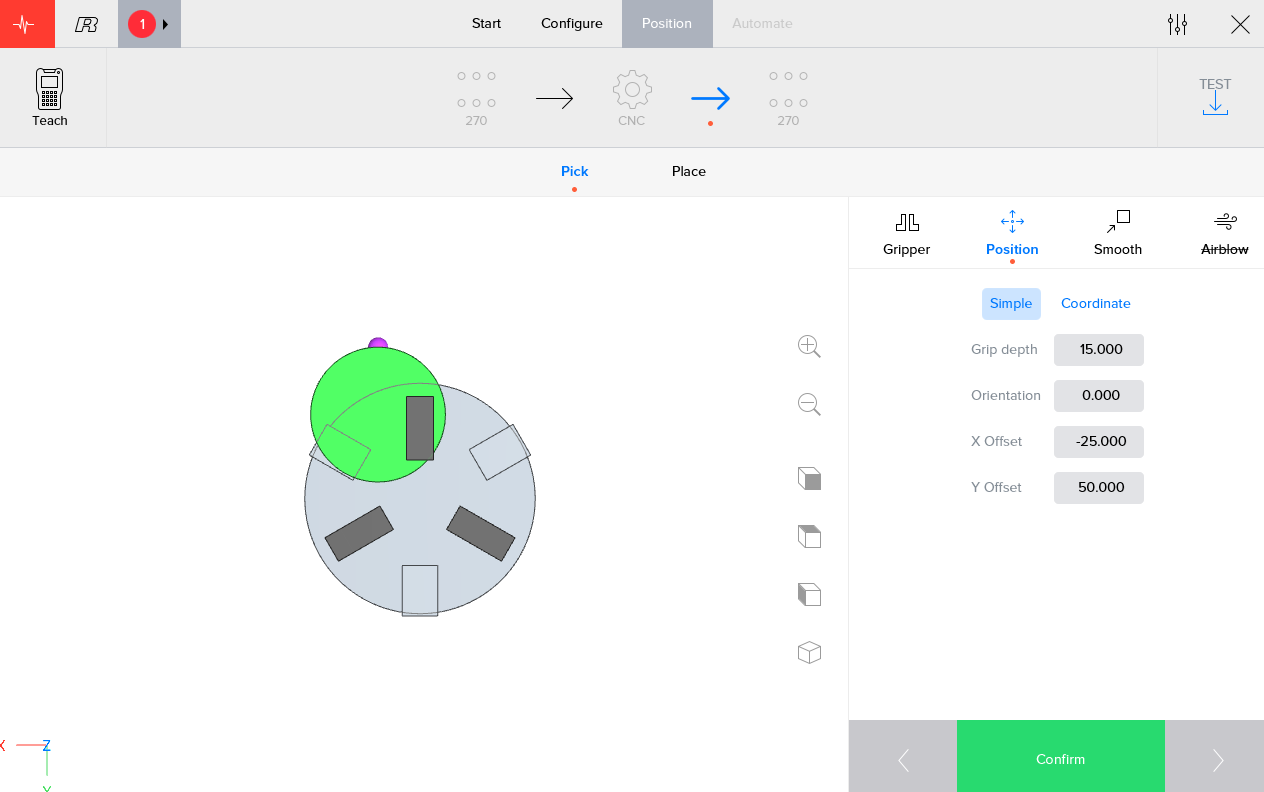
Lancez un cycle automatisé et arrêtez le robot alors qu’il prélève une pièce de la table.Vous pouvez utiliser le bouton Hold (Attente) à côté de l’écran IPC à cet effet.Plus les mâchoires du robot sont proches de la pièce, plus la mesure des décalages requis peut être précise.
|
Faites attention de déplacer le robot à une vitesse réduite lorsqu’il s’approche de la pièce à usiner.De cette manière, vous aurez assez de temps pour réagir et arrêter le robot lorsqu’une collision avec la pièce à usiner risque de se produire. |
Mesurez les décalages requis avec un ruban de mesure et complétez-les dans les X Offset (Décalage X) et Y Offset (Décalage Y) de l’IPC.Les mâchoires dans la visualisation s’écarteront de la pièce à usiner.La pièce à usiner dans la visualisation restera dans sa position « idéale-théorique ».
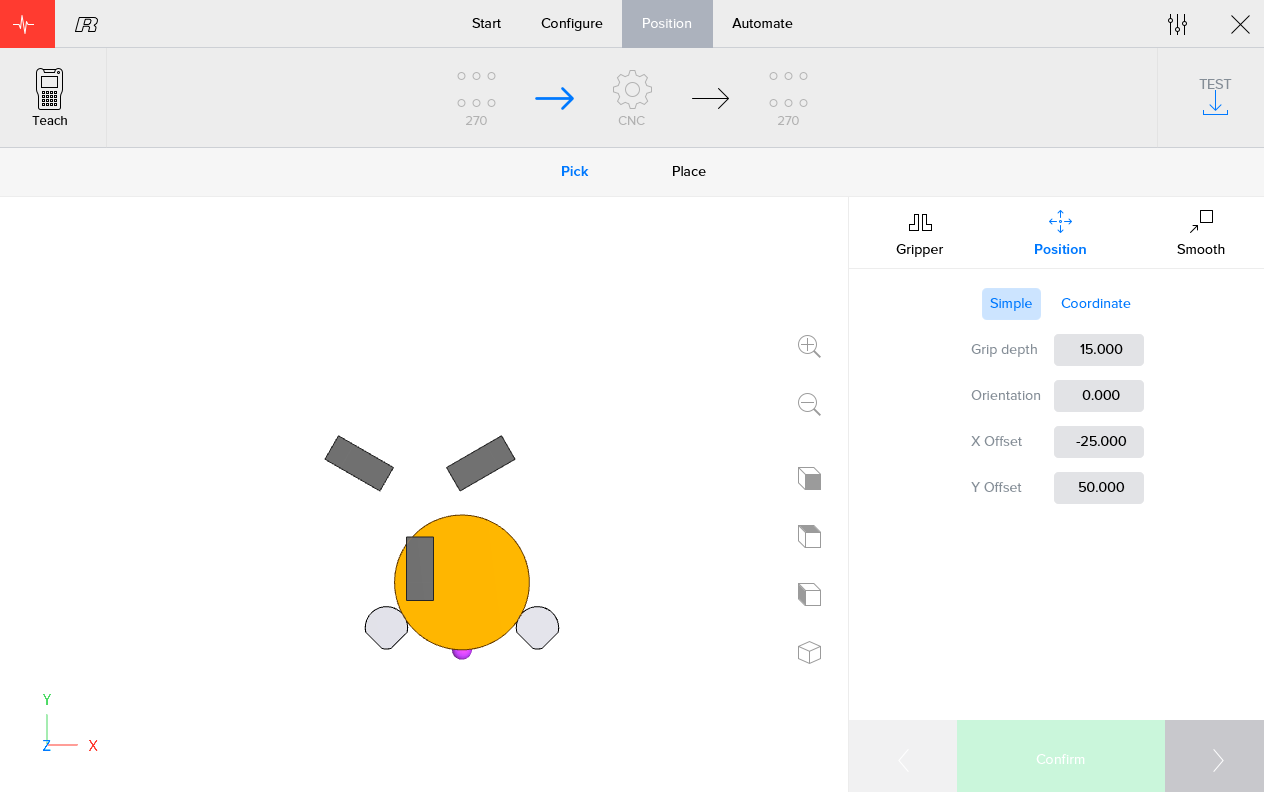
Annulez l’automatisation, puis recommencez pour contrôler si les décalages mesurés sont corrects.Il peut être nécessaire de répéter cette procédure plusieurs fois pour un réglage précis des décalages.
2.2. Réglage des décalages requis pour déposer la pièce dans le mandrin
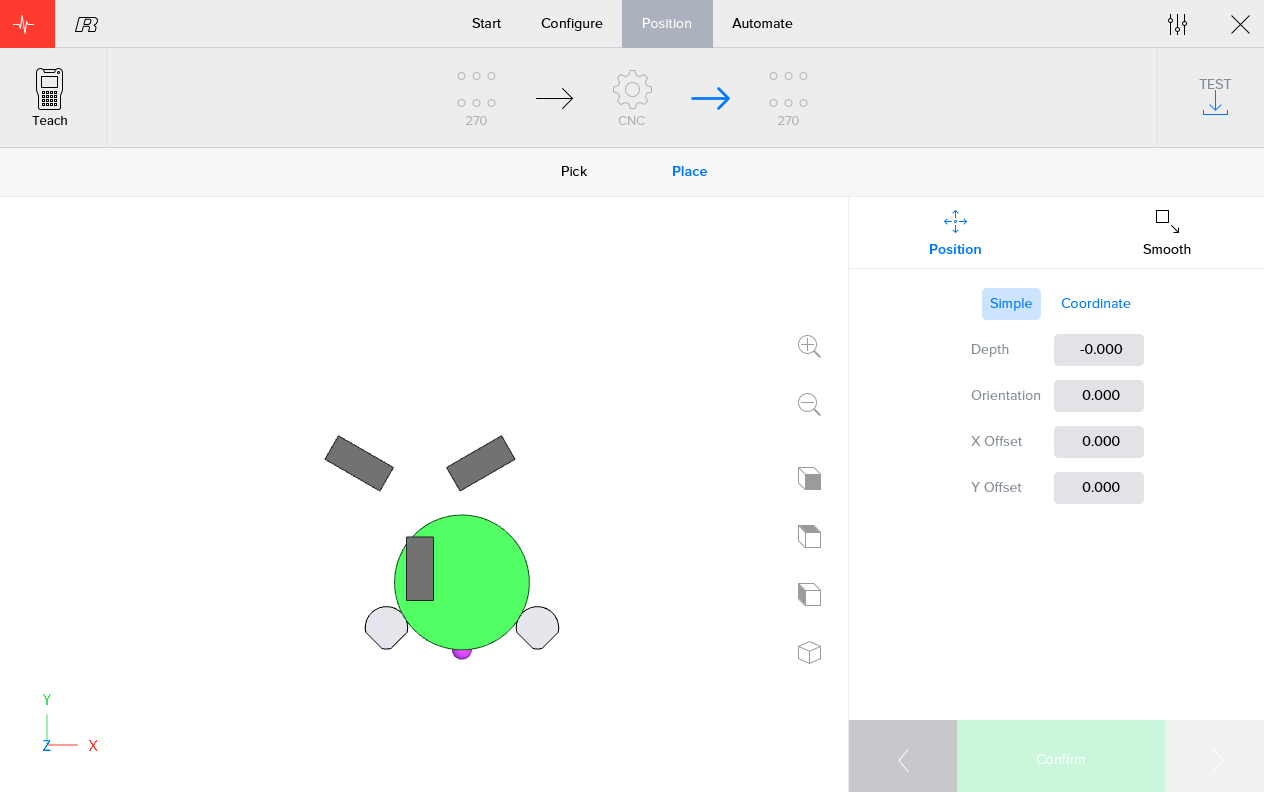
Vu que nous avons réglé certains Décalages dans l’étape précédente, le robot pense qu’il a prélevé la pièce à usiner de manière décentrée.Il procédera à une compensation en déposant la pièce dans le mandrin.Par conséquent, les pinces de préhension du robot seront décentrées par rapport au mandrin, comme indiqué dans la visualisation suivante.
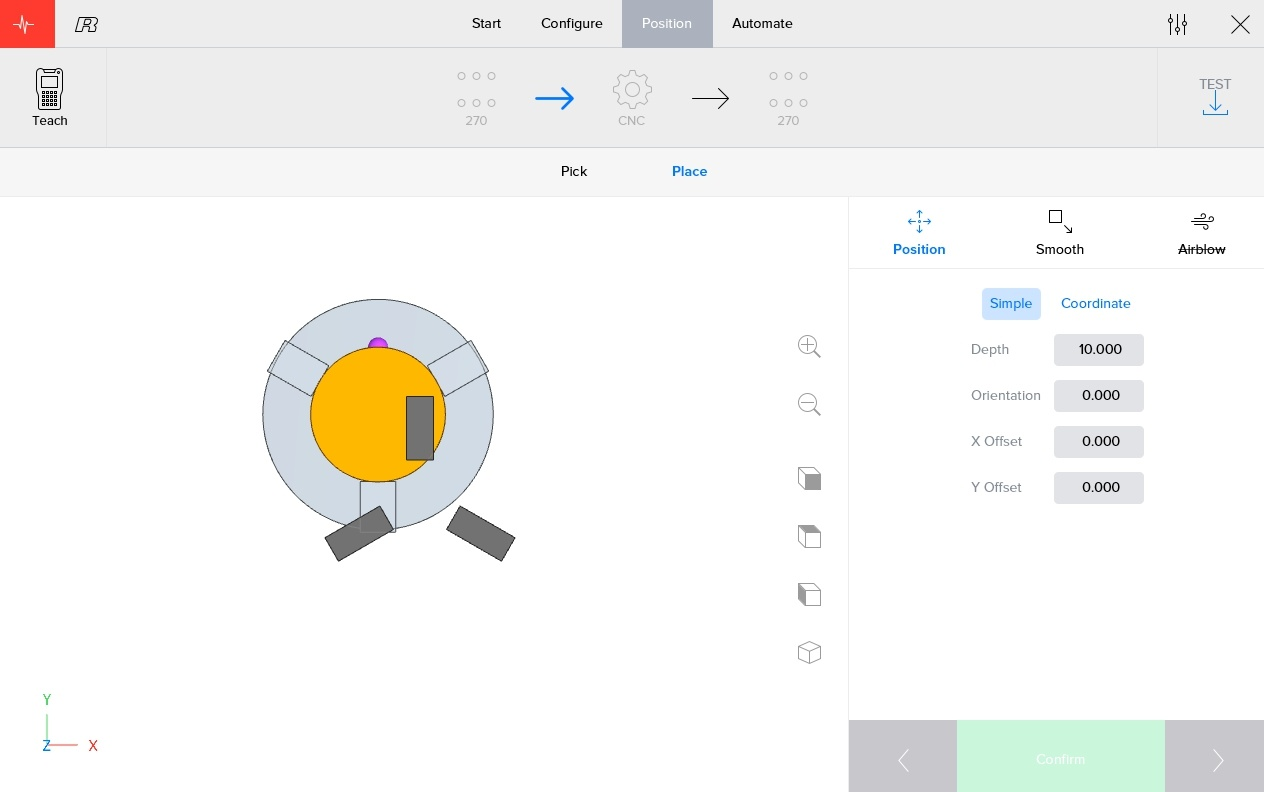
En réalité, la pièce à usiner est naturellement située au centre des pinces de préhension du robot.Par conséquent, nous devons introduire à nouveau quelques décalages pour nous assurer que les pinces de préhension placeront la pièce à usiner au centre du mandrin.Les valeurs que vous introduisez pour X Offset (Décalage X) et Y Offset (Décalage Y) devraient être les mêmes que celles complétées à l’étape précédente.Les pinces de préhension du robot dans la visualisation se déplaceront vers le centre du mandrin.La pièce à usiner virtuelle dans la visualisation gardera sa position relative par rapport aux pinces de préhension du robot et se trouvera à présent décentrée par rapport au mandrin.Ce n’est pas un problème puisque nous savons qu’en réalité, la pièce à usiner est située au centre des pinces de préhension du robot.
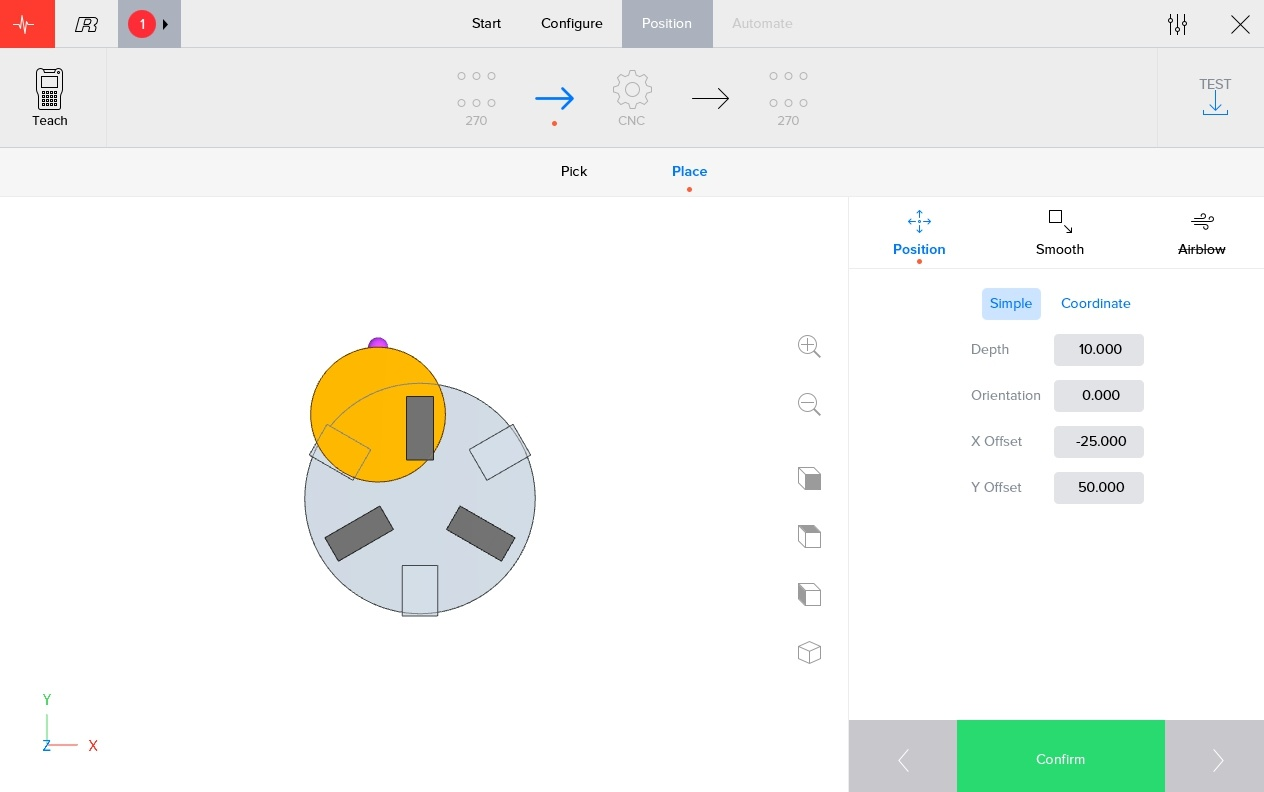
Si le Cadre Utilisateur du mandrin n’est pas correct et que vous remarquez que la pièce à usiner n’est pas parfaitement centrée dans le mandrin, cela peut également être compensé en modifiant encore les Décalages dans cette étape.
2.3. Réglage des décalages requis pour prélever la pièce du mandrin
Étant donné que nous avons réglé certains Décalages dans l’étape précédente, le robot pense qu’il a décentré la pièce à usiner dans le mandrin.Il procédera à une compensation tout en prélevant la pièce du mandrin.Par conséquent, les pinces de préhension du robot seront décentrées par rapport au mandrin, comme on peut le voir dans la visualisation suivante.
|
Lorsque votre système RoboJob a l’option « Position pièce finie » activée ou que votre pièce finie est passée de la broche principale à la broche secondaire, la position de la pièce à usiner dans le mandrin est « réinitialisée ».Elle apparaîtra par conséquent au centre du mandrin, comme elle se trouve en réalité, et pourra être prélevée sans appliquer aucun décalage (sauf, naturellement, ceux nécessaires pour compenser un mauvais cadre utilisateur sur le mandrin). |
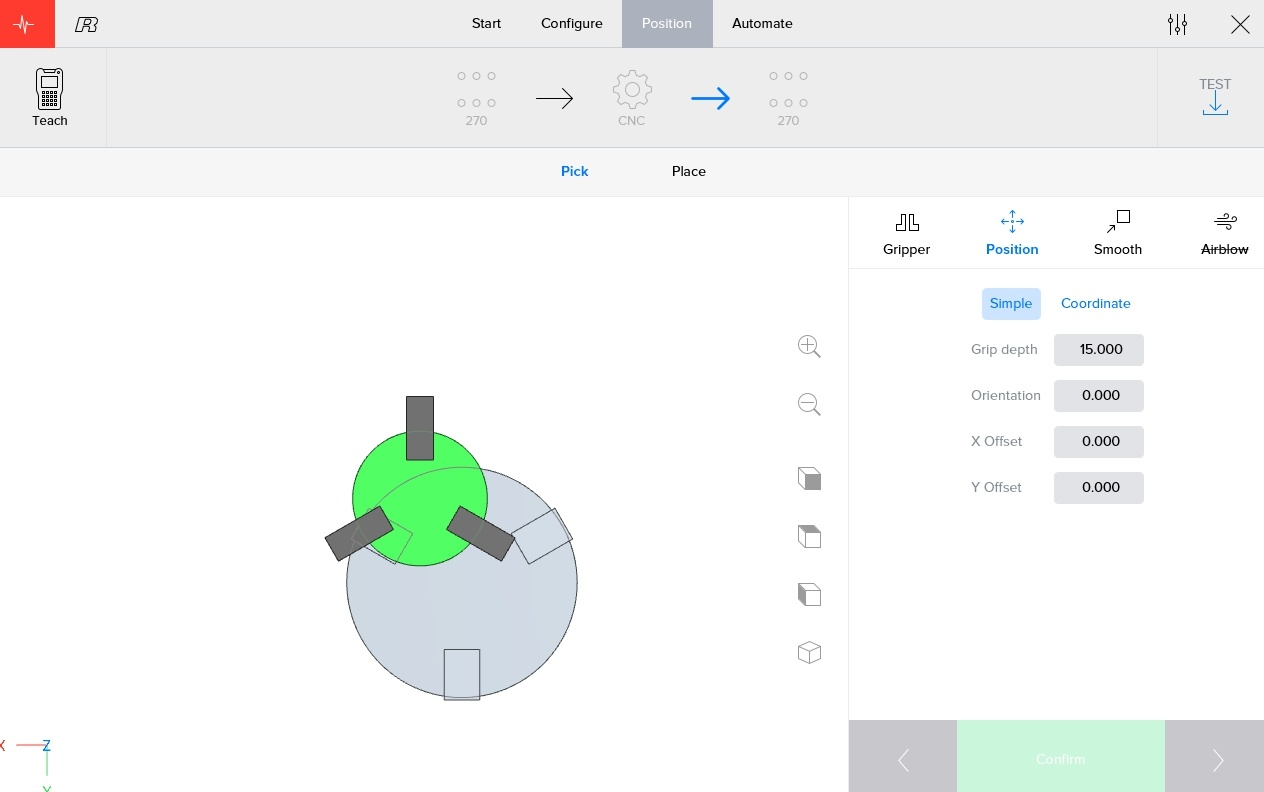
En réalité, la pièce à usiner est située au centre du mandrin.Pour effectuer une compensation, nous devons à nouveau appliquer certains décalages pour nous assurer que les pinces de préhension du robot prélèvent la pièce à usiner au centre du mandrin.Les valeurs qui doivent être introduites doivent être les mêmes que celles de l’étape précédente.Vous remarquerez que les mâchoires du robot se déplacent vers le centre du mandrin où est située la pièce à usiner réelle.La pièce à usiner virtuelle dans la visualisation gardera sa position par rapport au mandrin.
2.4. Réglage des décalages requis pour déposer la pièce à usiner sur la table
Étant donné que nous avons réglé certains Décalages dans l’étape précédente, le robot pense qu’il a prélevé la pièce à usiner dans une position décentrée.Il compensera ce décalage tout en déposant la pièce sur la table.Par conséquent, les princes de préhension du robot ne seront pas alignées centralement par rapport au centre des deux poteaux comme on peut le voir dans la visualisation suivante.Dans ce cas, ce désalignement est égal au décalage que nous avons introduit dans le première étape.Étant donné que nous plaçons la pièce sur la même table et donc le même cadre utilisateur incorrect, comme dans la première étape, ce désalignement est exactement ce dont nous avons besoin pour placer la pièce dans sa position exacte en réalité.
2.5. Approche générale
Lorsque la pièce à usiner est replacée dans une position différente de la première étape, par exemple une palette, les choses deviennent un peu plus compliquées.À ce stade, il est probablement plus simple de procéder par tâtonnements pour déterminer les décalages corrects.Les valeurs numériques absolues des décalages requis devraient la plupart de temps se situer autour des valeurs retrouvées dans l’étape 1, plus ou moins les décalages supplémentaires qui sont nécessaires lorsque les autres cadres utilisateurs présentent aussi un léger désalignement.
2.6. Autres méthodes
Il est possible aussi de guider manuellement le robot vers les positions de prélèvement ou de dépôt en utilisant la console Teach Pendant, comme décrit dans le manuel.
2.7. Solution permanente
Pour une solution permanente à ce problème, un technicien RoboJob doit recommencer l’apprentissage des cadres utilisateurs affectés.Veuillez contacter RoboJob pour prendre rendez-vous.
3. Comment obtenir de l’aide supplémentaire
N’hésitez pas à nous contacter lorsque vous avez besoin d’une assistance supplémentaire au-delà des documents fournis dans la base de connaissances du service RoboJob.
Vous pouvez contacter le service RoboJob Service en utilisant les moyens suivants:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Téléphone: +32 15 70 89 70
Nous vous prions de bien vouloir nous fournir les informations suivantes:
-
Numèro de sèrie xx-xx-xxx
-
Description de l’erreur ou de la piëce dèfectueuse
-
Message ou code d’erreur exact
-
Qu’a fait le robot
-
Qu’Ètait-il supposè faire
-
Photos ou vidèos
Vous pouvez nous envoyer ces informations par e-mail.Pour envoyer des fichiers volumineux, vous pouvez utiliser un service de transfert de fichiers comme WeTransfer: robojob.wetransfer.com.
Une confirmation automatique vous sera envoyée dès réception de votre courrier.