Définir une pince de préhension comme fixe dans le logiciel IPC - Mill-Assist
|
Vous ne voulez pas apprendre cette information au robot à chaque redémarrage.Vous pouvez éviter cette tâche en indiquant que cette pince de préhension est fixe. En cas d’utilisation de ventouses à vide, le processus doit être appris à chaque démarrage du logiciel.Il se peut que les pinces de préhension ne soient pas correctement configurées, de sorte que le logiciel pense qu’il est nécessaire de procéder à un apprentissage à chaque fois.Pour éviter cette situation, il vous est possible d’indiquer que les pinces de préhension sont des pinces de préhension fixes.Grâce à la valeur fixe des pinces de préhension, le robot mémorise les valeurs apprises précédemment afin d’éviter tout nouvel apprentissage de celles-ci. Exécutez la procédure suivante: |
1. Servez-vous des outils suivants
|
|

2. Procédure
2.1. Démarrage de l’IPC
Mettez l’IPC sous tension et lancez le logiciel.
2.2. Ouverture des paramètres des pinces de préhension
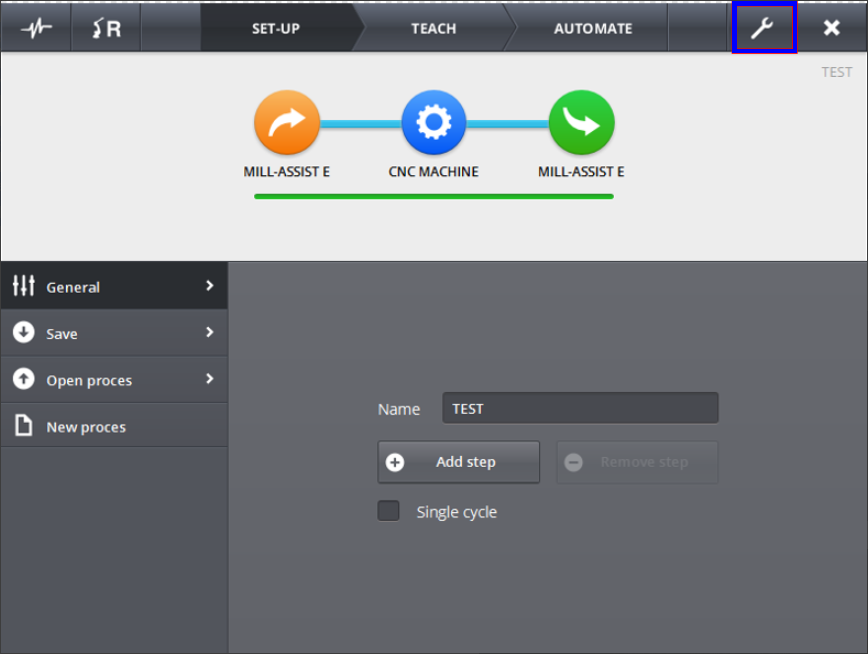
Ouvrir les paramètres des pinces de préhension en cliquant sur l’icône des paramètres qui se situe en haut à droite de l’IPC.
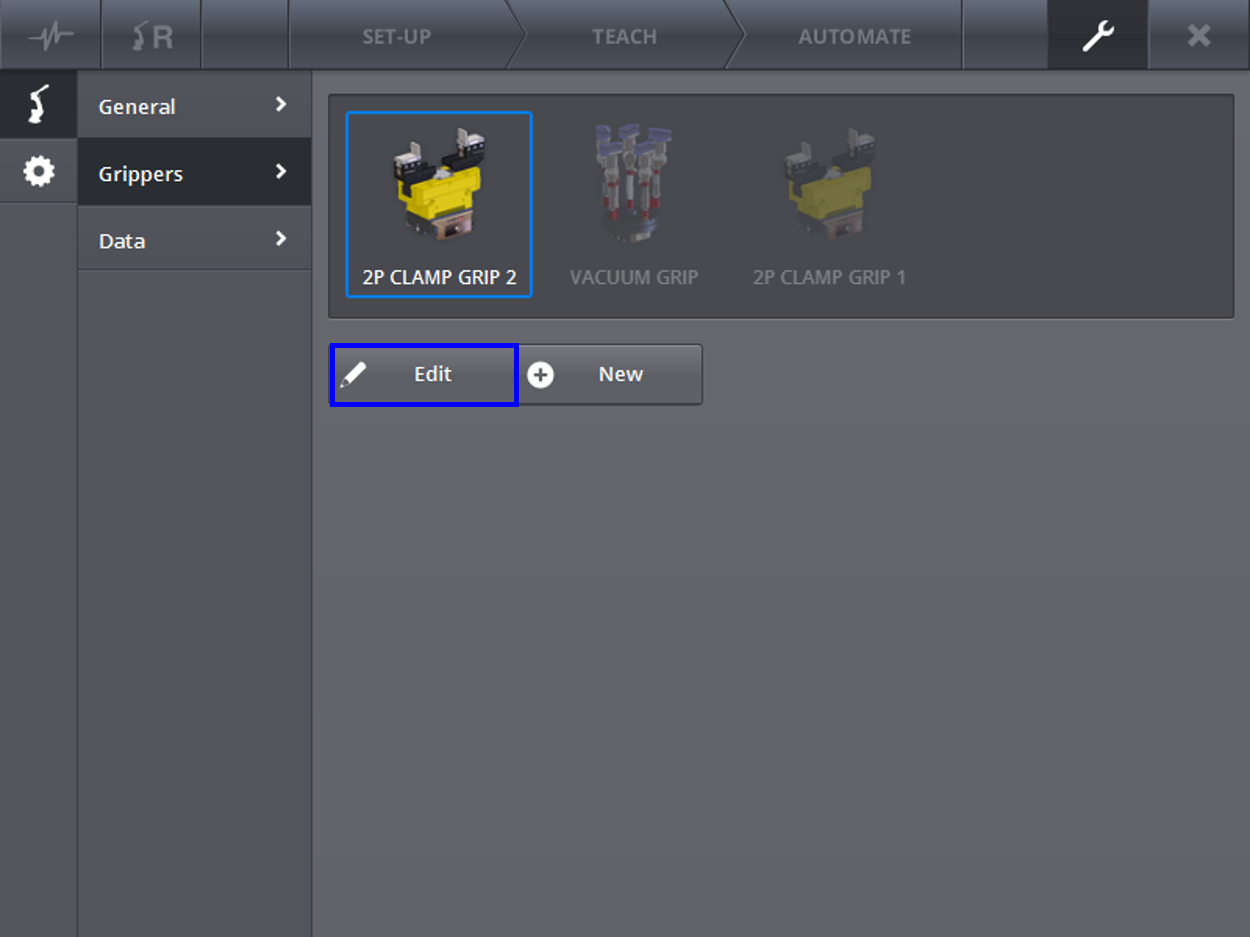
Cliquez sur l’icône du robot, puis sur « Grippers » (Pinces de préhension).
2.3. Définition de la pince de préhension appropriée
Sélectionnez la pince de préhension que vous voulez déterminer comme fixe et cliquez sur « Edit » (Modifier) pour modifier les paramètres.
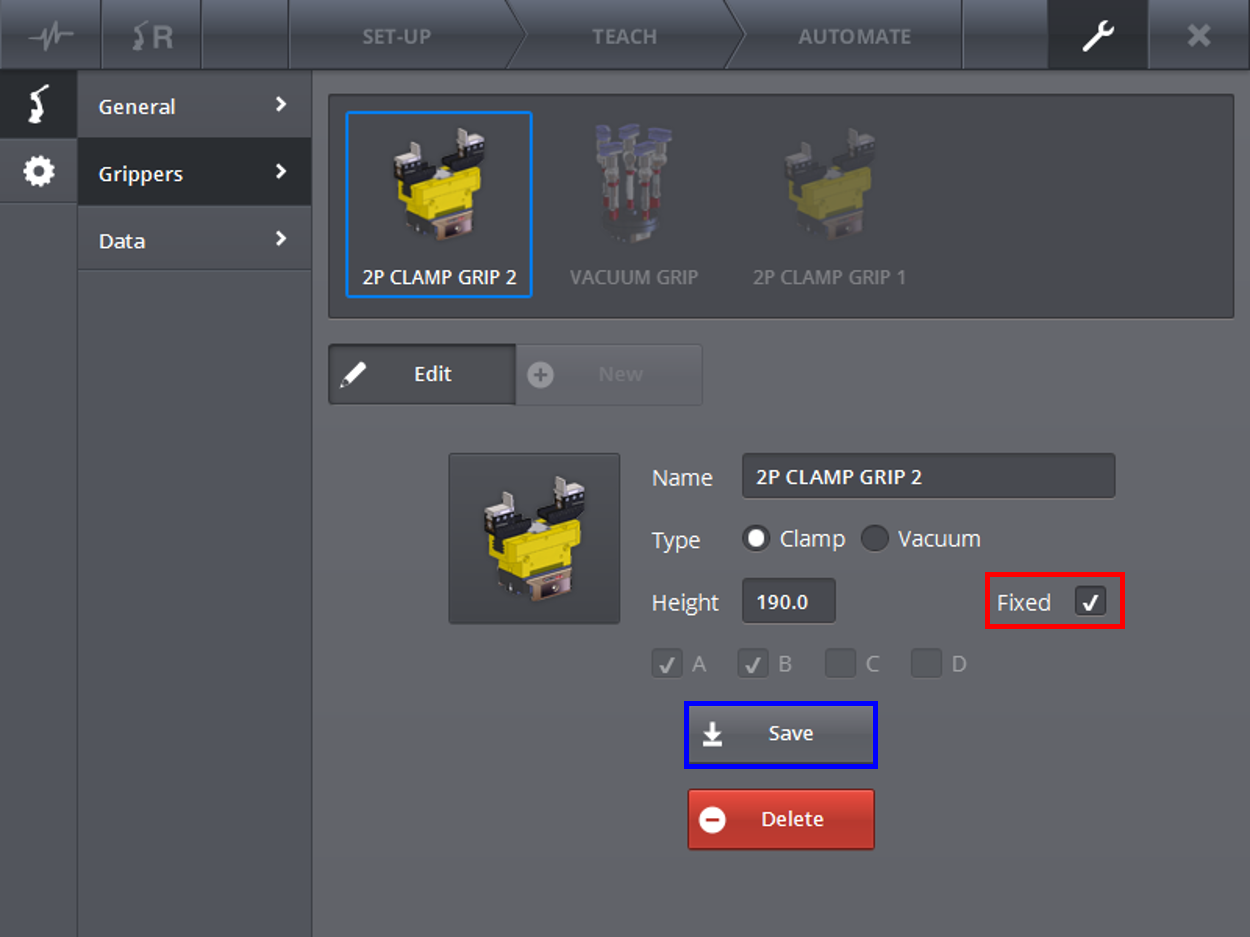
Cochez la case qui se situe à côté du terme « Fixed » (Fixe) pour faire de la pince de préhension une pince fixe.
Enregistrez les paramètres.
Répétez cette procédure pour toutes les pinces de préhension.
3. Comment obtenir de l’aide supplémentaire
N’hésitez pas à nous contacter lorsque vous avez besoin d’une assistance supplémentaire au-delà des documents fournis dans la base de connaissances du service RoboJob.
Vous pouvez contacter le service RoboJob Service en utilisant les moyens suivants:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Téléphone: +32 15 70 89 70
Nous vous prions de bien vouloir nous fournir les informations suivantes:
-
Numèro de sèrie xx-xx-xxx
-
Description de l’erreur ou de la piëce dèfectueuse
-
Message ou code d’erreur exact
-
Qu’a fait le robot
-
Qu’Ètait-il supposè faire
-
Photos ou vidèos
Vous pouvez nous envoyer ces informations par e-mail.Pour envoyer des fichiers volumineux, vous pouvez utiliser un service de transfert de fichiers comme WeTransfer: robojob.wetransfer.com.
Une confirmation automatique vous sera envoyée dès réception de votre courrier.