Ramener manuellement en position initiale (avec Robot)
|
La position qu’occupe le robot est inconnue et son retour automatique à sa position initiale s’avère impossible.Exécutez cette procédure pour ramener le robot à sa position initiale. |
|
Essayez d’abord d’utiliser la fonction de retour à la position initiale dans le menu du robot.Cette procédure ne devrait être utilisée que dans le cas exceptionnel où le robot n’est pas en mesure de retourner automatiquement dans sa position initiale. |
- 1. Servez-vous des outils suivants
-
2. Procédure
- 2.1. Passage du robot en mode manuel
- 2.2. Abandon des programmes en cours d’exécution
- 2.3. Rétablissement de toutes les valeurs par défaut et déplacement manuel du robot jusqu’à une position voisine de sa position initiale.
- 2.4. Retour en mode automatique et redémarrage du robot
- 2.5. Retour de l’articulation à la position initiale
- 3. Comment obtenir de l’aide supplémentaire
1. Servez-vous des outils suivants
|
|
|
|

2. Procédure
2.1. Passage du robot en mode manuel
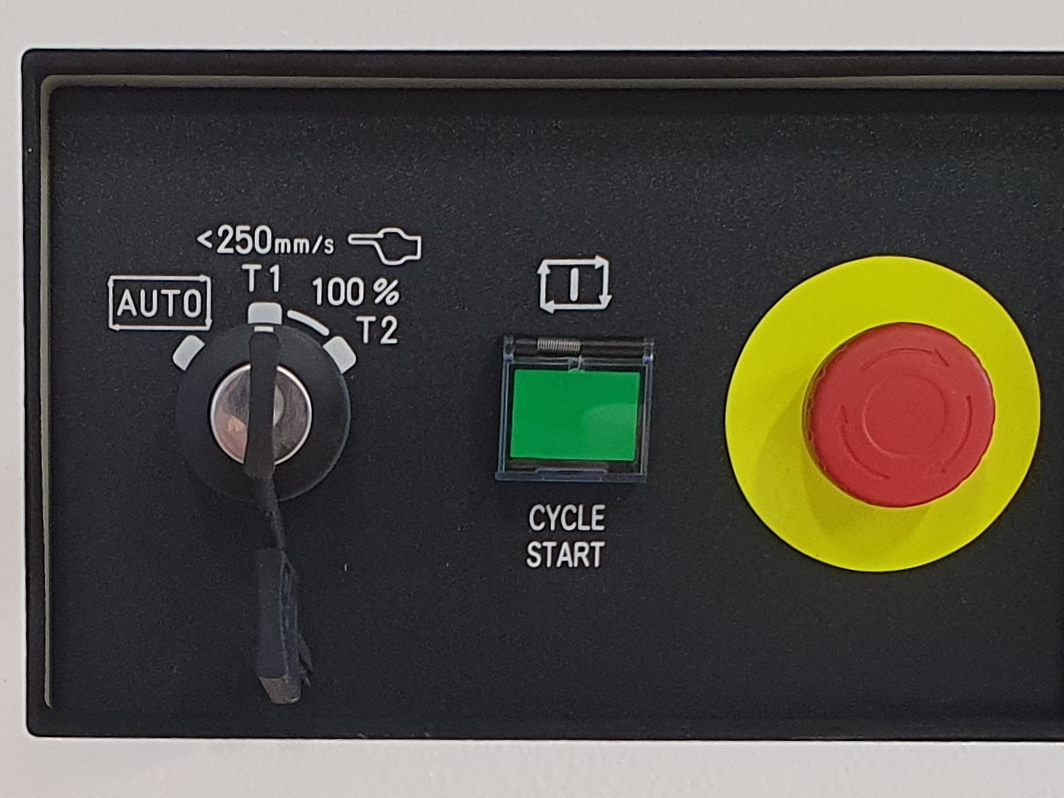
Amenez le commutateur à trois positions de l’unité de commande du robot sur la position T1-Mode.
Amenez le commutateur à deux positions du Teach Pendant sur la position On-Mode.

2.2. Abandon des programmes en cours d’exécution
Les programmes de communication RoboJob sont encore en cours d’exécution sur le robot.
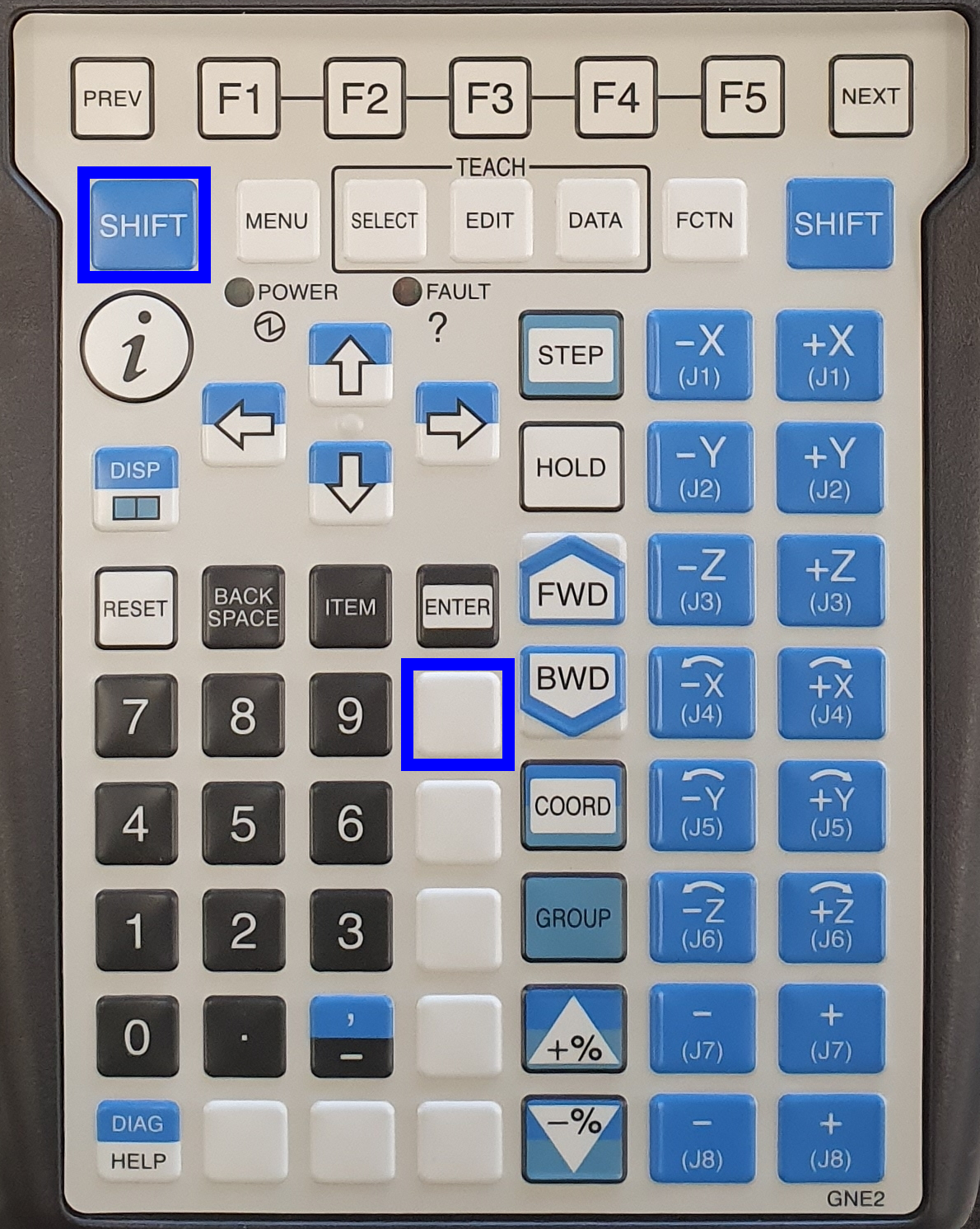
Abandonnez les programmes en cours d’exécution en appuyant sur les touches SHIFT + USER KEY 1 (MAJ. + TOUCHE UTILISATEUR 1).La touche USER KEY 1 (TOUCHE UTILISATEUR 1) se situe immédiatement sous la touche ENTER (ENTRÉE) ; on lui donne parfois le nom de Unmarked key 1 (Touche sans mention 1), Tool 1 (Outil 1) ou Unnamed 1 (Sans dénomination 1).Il s’agit de l’une des touches blanches et vierges du clavier de la console de commande Teach Pendant.
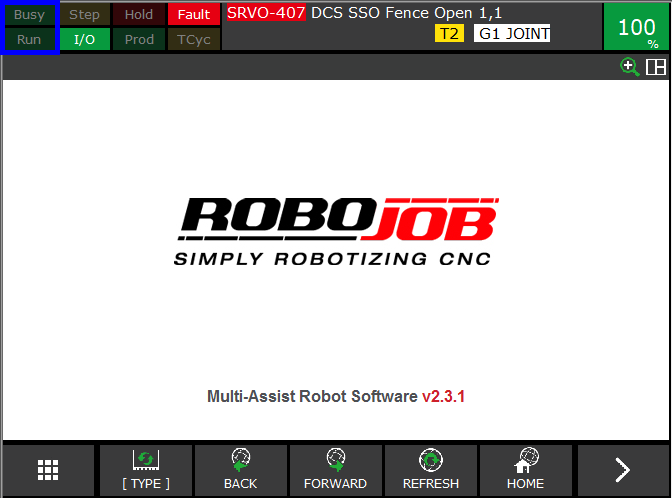
Assurez-vous de l’arrêt du logiciel.Les indicateurs Busy [Occupé] et Run [Exécution] qui s’affichent dans le coin supérieur gauche de l’écran doivent virer au vert foncé.Sur certaines versions plus anciennes, les indicateurs Busy [Occupé] et Run [Exécution] prendront une teinte jaune.
2.3. Rétablissement de toutes les valeurs par défaut et déplacement manuel du robot jusqu’à une position voisine de sa position initiale.
Pour déplacer le robot en toute sécurité, il convient de ramener le commutateur homme mort monté au dos du Teach Pendant à sa position intermédiaire de sécurité.
Les deux commutateurs homme mort présentent trois positions :
-
Interrupteur non sollicité
-
Position intermédiaire de sécurité
-
Interrupteur enfoncé à fondActionnez ces contacteurs pour apprendre à percevoir ces trois positions.Pour rétablir les valeurs par défaut et déplacer le robot, vous ne devez ramener qu’un seul commutateur homme mort à sa position intermédiaire de sécurité.Par conséquent, abstenez-vous d’exercer une pression excessive ou insuffisante !
Appuyez sur la touche SHIFT [MAJ.] + RESET [RÉINITIALISER] pour lever toutes les anomalies.L’indicateur d’anomalie virera du rouge au rouge foncé.
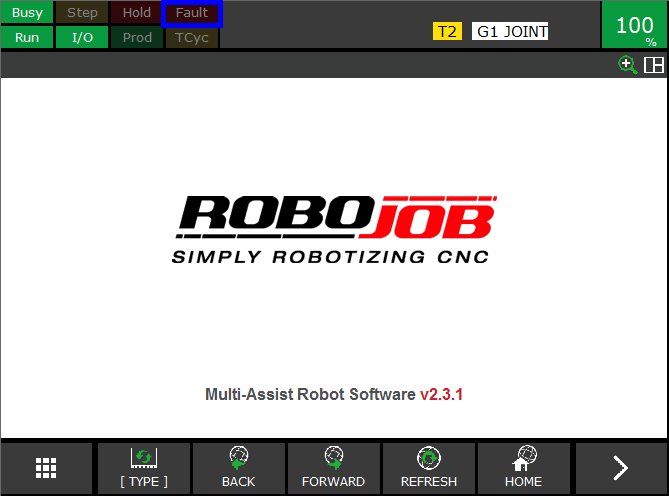
À présent, vous êtes à même de déplacer le robot.
| Rearque |
Veillez à ce que le robot ne heurte aucun obstacle pendant son déplacement.Soyez attentif aux autres personnes, aux machines environnantes, aux obstacles éventuels et au robot en tant que tel.Veillez à ne pas endommager les câbles montés autour du robot.
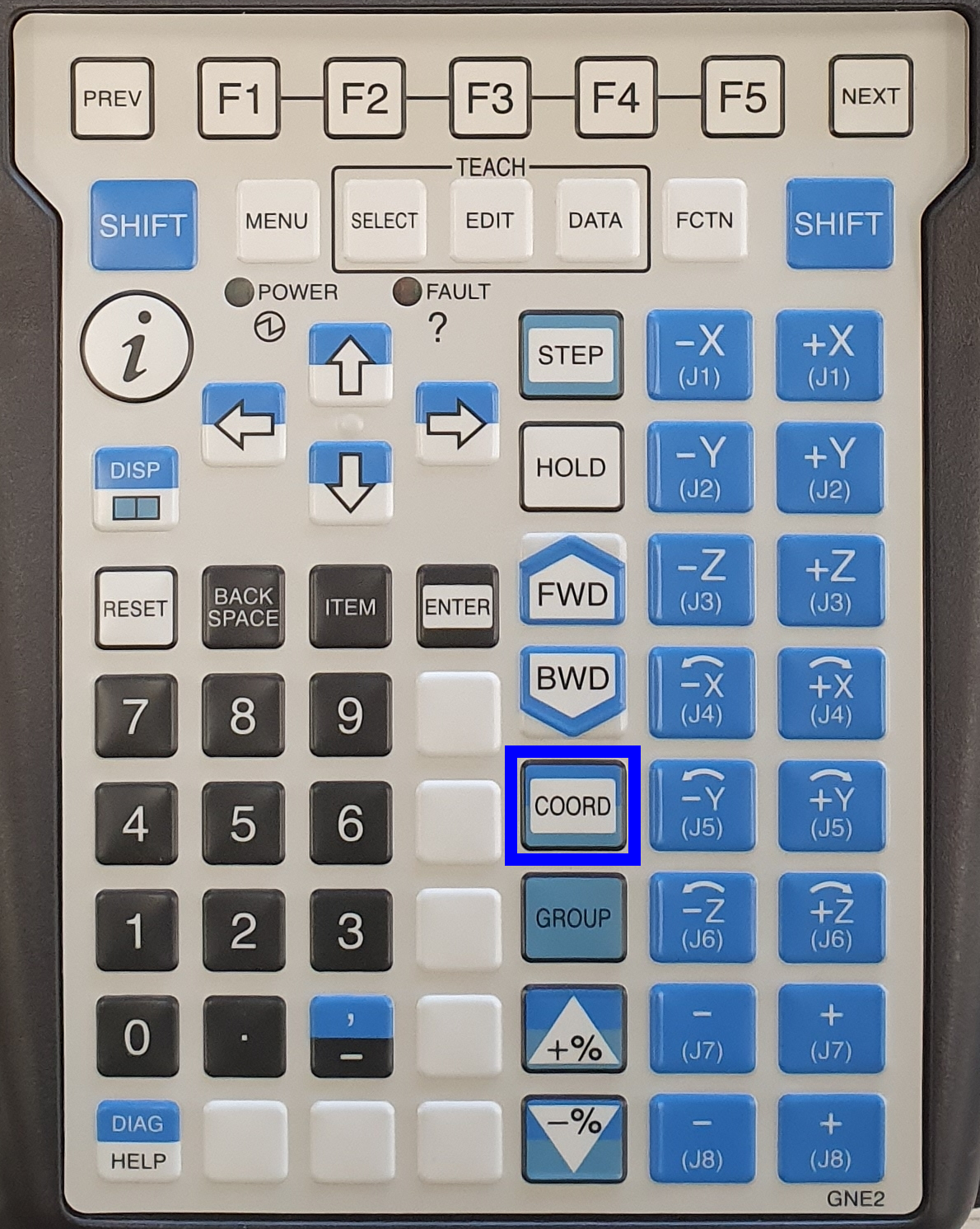
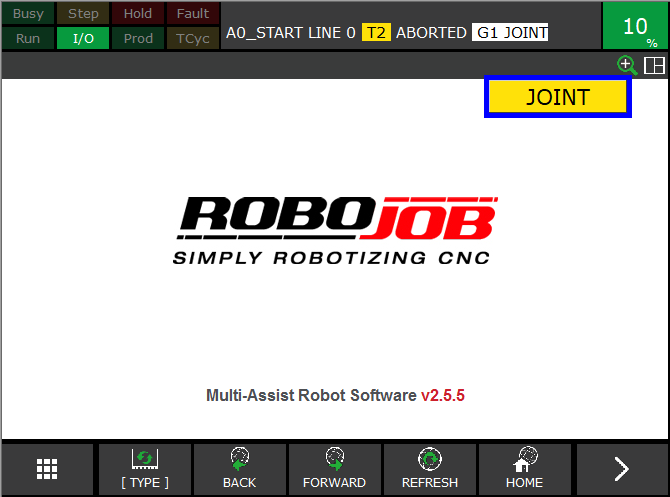
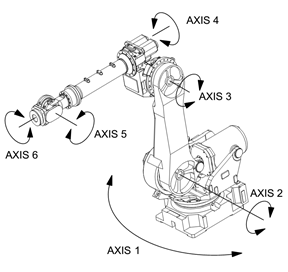
Appuyez sur la touche COORD pour modifier la direction de déplacement.Continuez à appuyer jusqu’à ce que l’option JOINT [ARTICULATION] soit sélectionnée.Le mode de déplacement JOINT [ARTICULATION] est le plus simple à utiliser.Il permet d’agir individuellement sur les articulations du robot.
|
|
|
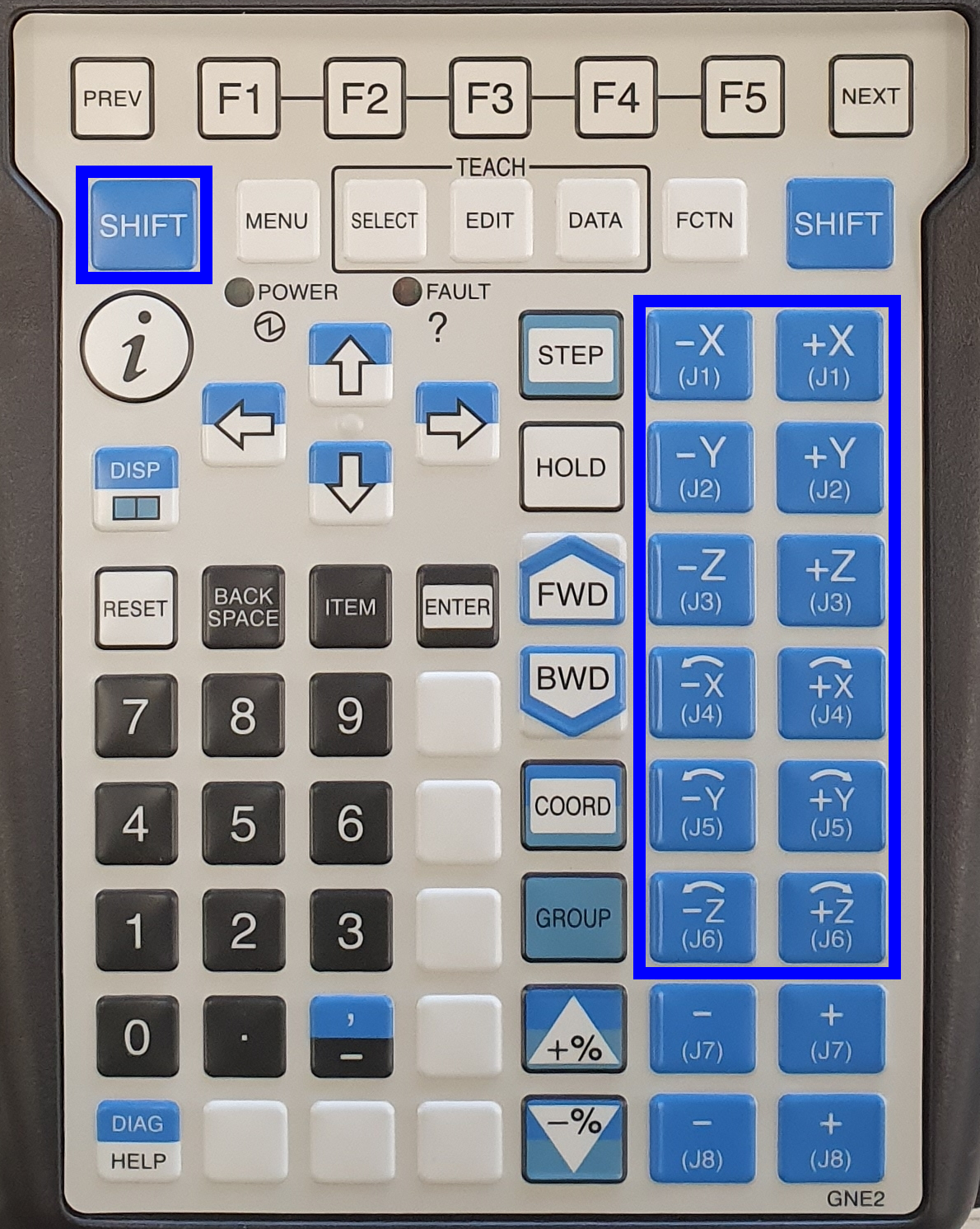
Appuyez sur les touches SHIFT [MAJ.] + ±J1-8 pour amener le robot à proximité de sa position initiale.
|
|
|
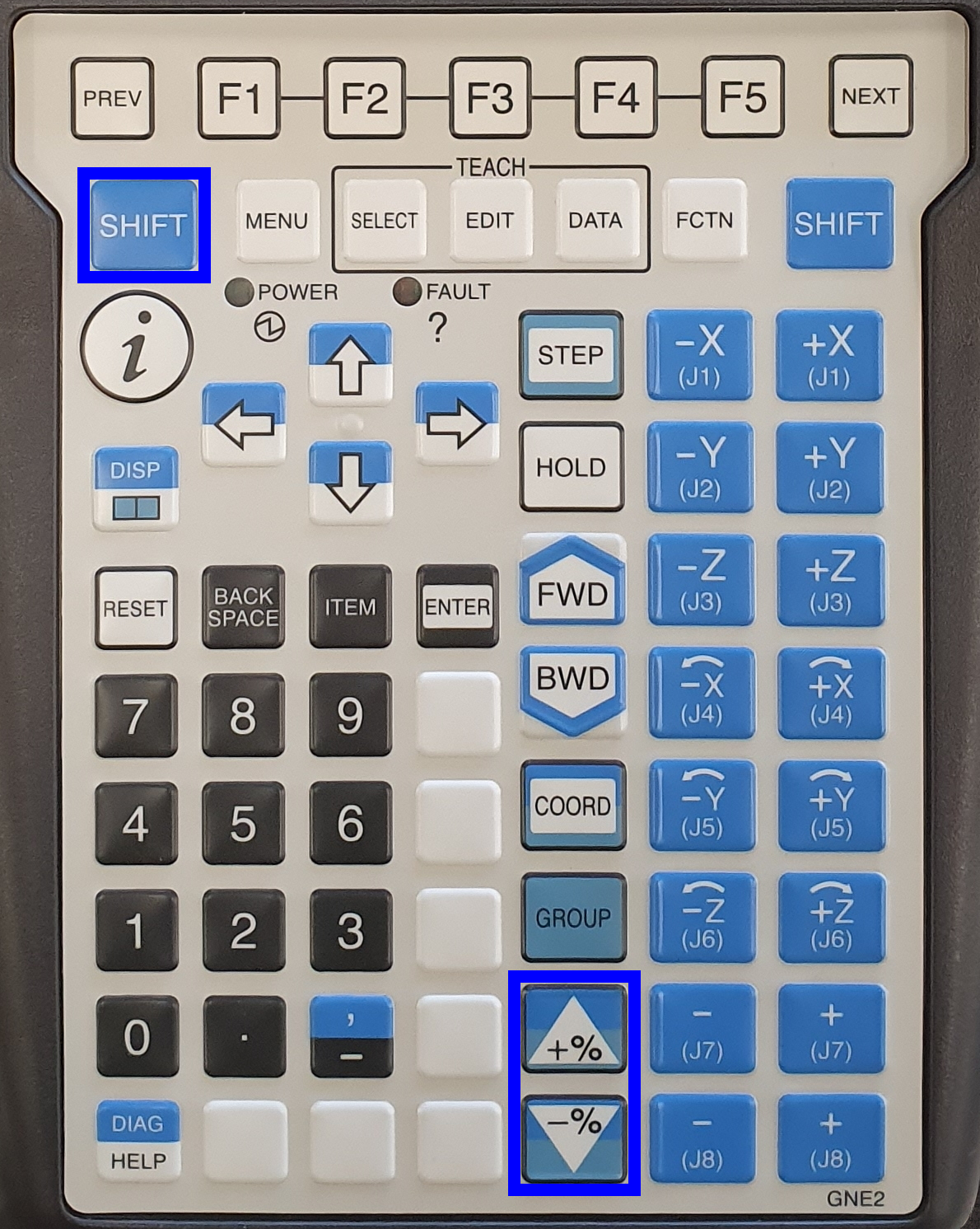
Appuyez sur les touches SHIFT [MAJ.] + +% ou -% pour régler la vitesse.
2.4. Retour en mode automatique et redémarrage du robot
Amenez le commutateur à trois positions de l’unité de commande du robot sur la position AUTO-Mode.

Amenez le commutateur à deux positions du Teach Pendant sur la position OFF-Mode (Mode-DÉSACTIVER).

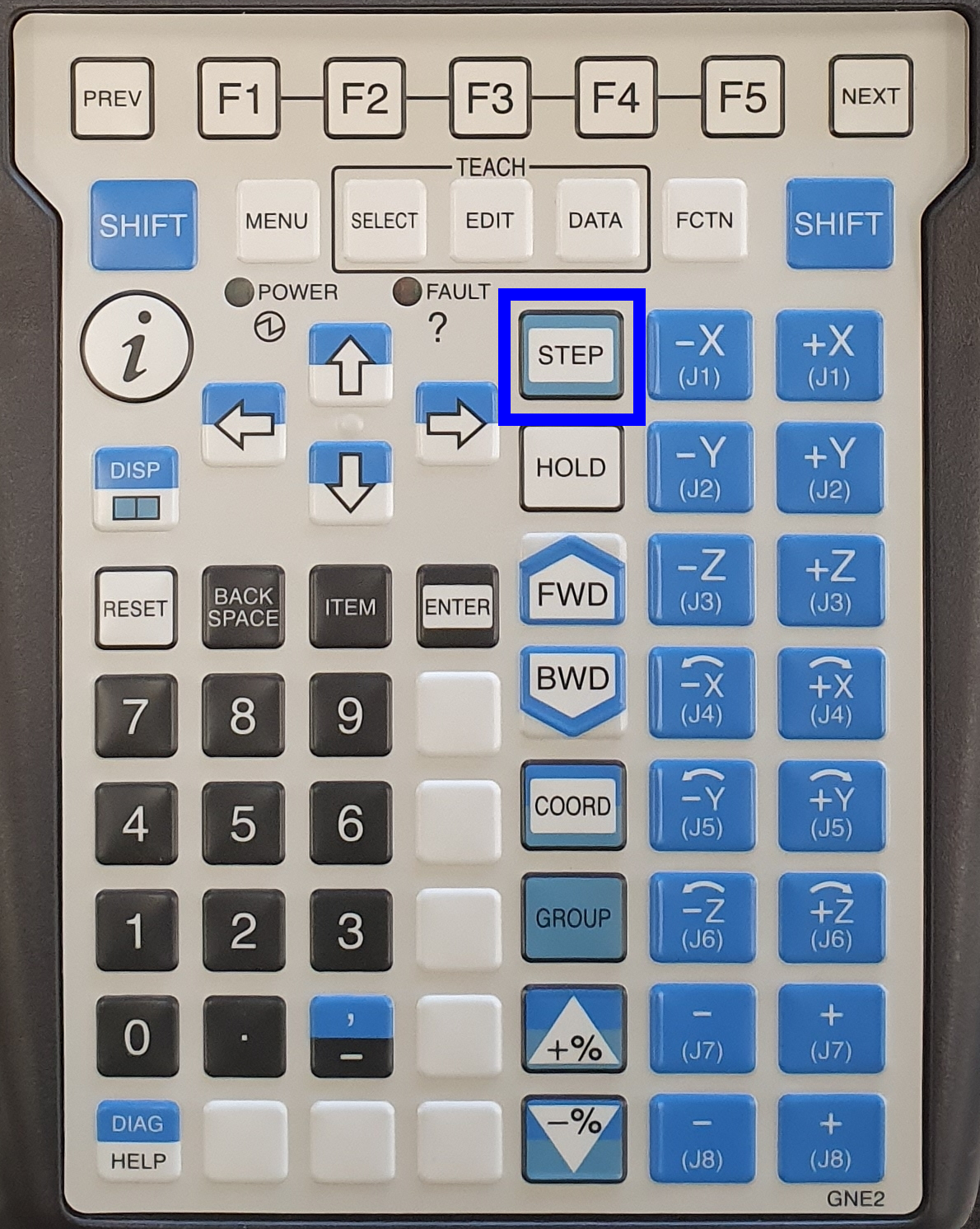
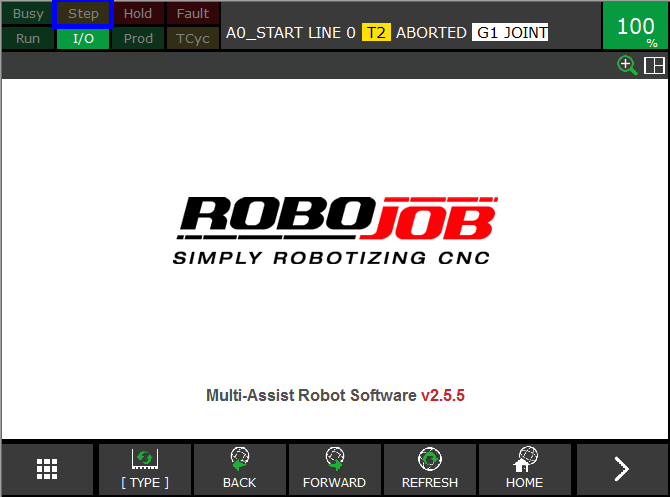
Avant de redémarrer, assurez-vous que l’indicateur Step a viré au jaune foncé.Servez-vous de la touche STEP pour passer d’un mode de marche à l’autre.
|
|
|
Exécutez un cycle de remise sous tension de l’unité de commande du robot pour relancer le logiciel de communication du robot.

2.5. Retour de l’articulation à la position initiale
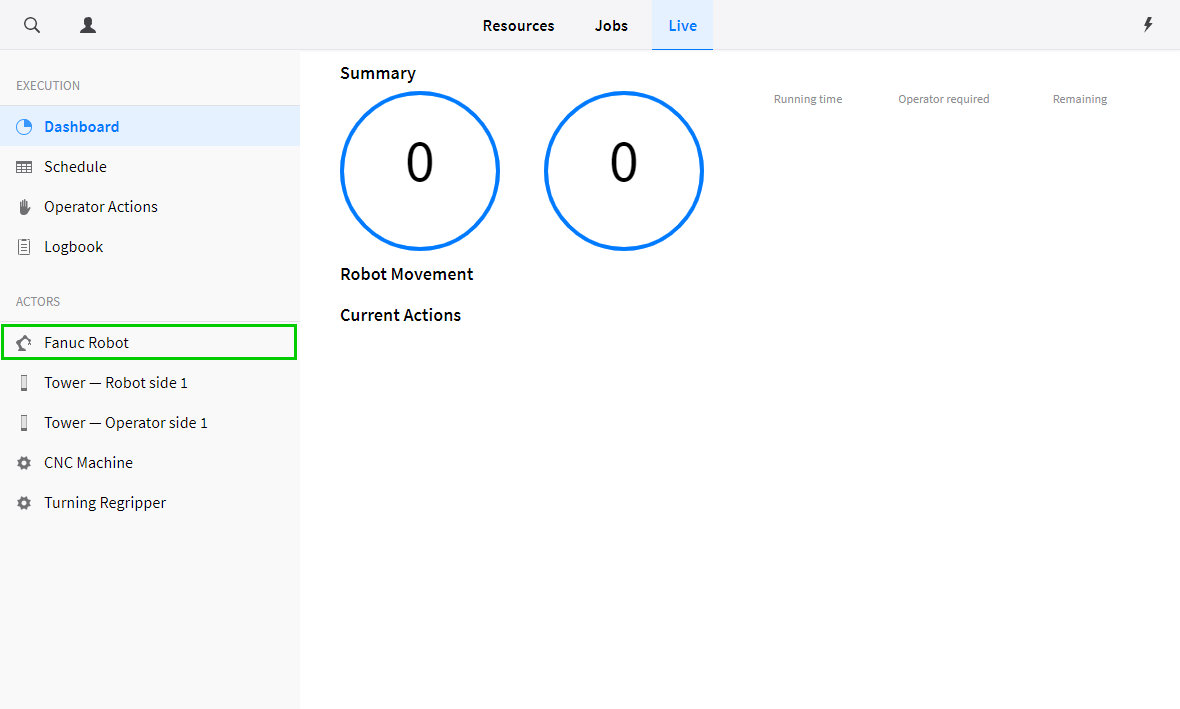
Revenez à l’IPC et cliquez sur le menu Robot que propose l’écran Live
Passez ensuite aux Interventions manuelles sur le robot.
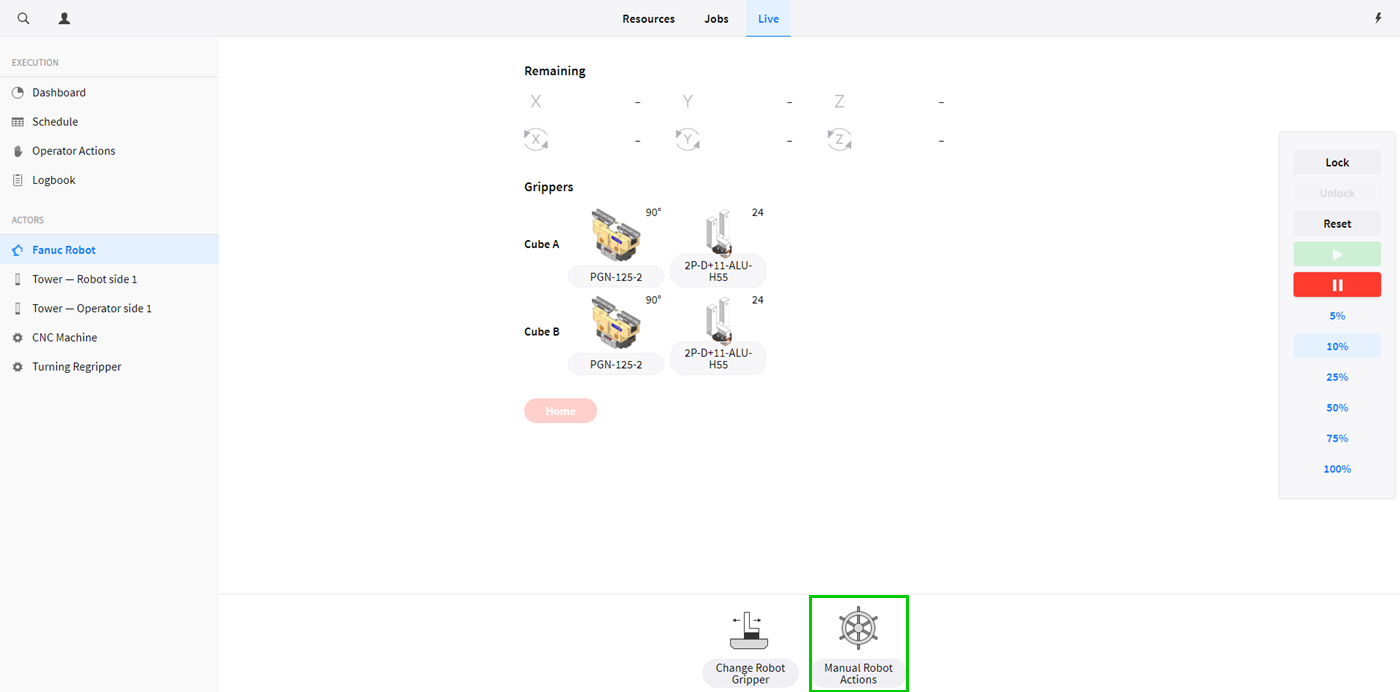
Verrouillez le robot, puis cliquez sur Continue [Continuer].

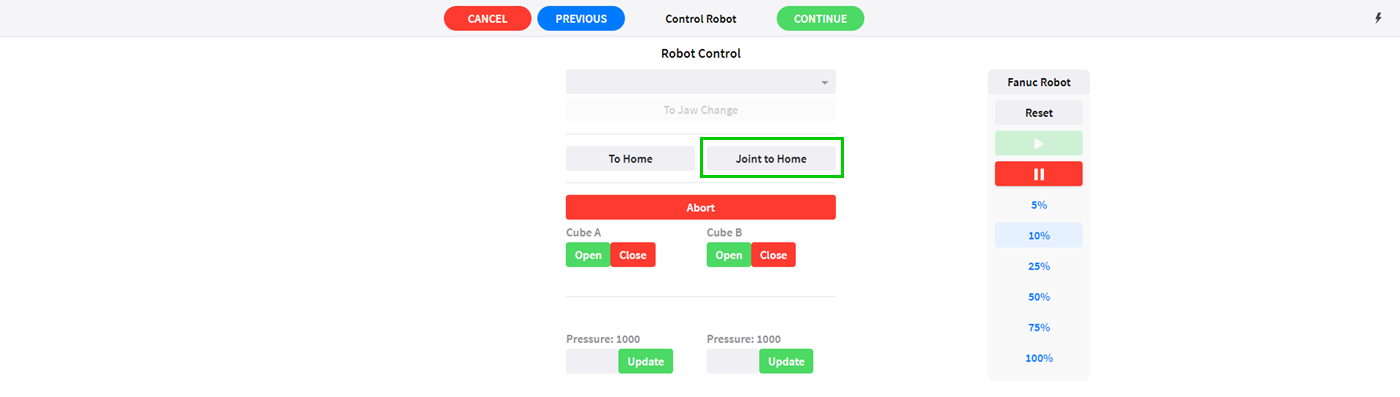
Cliquez ensuite sur « Joint To Home » [Retour de l’articulation à la position initiale].
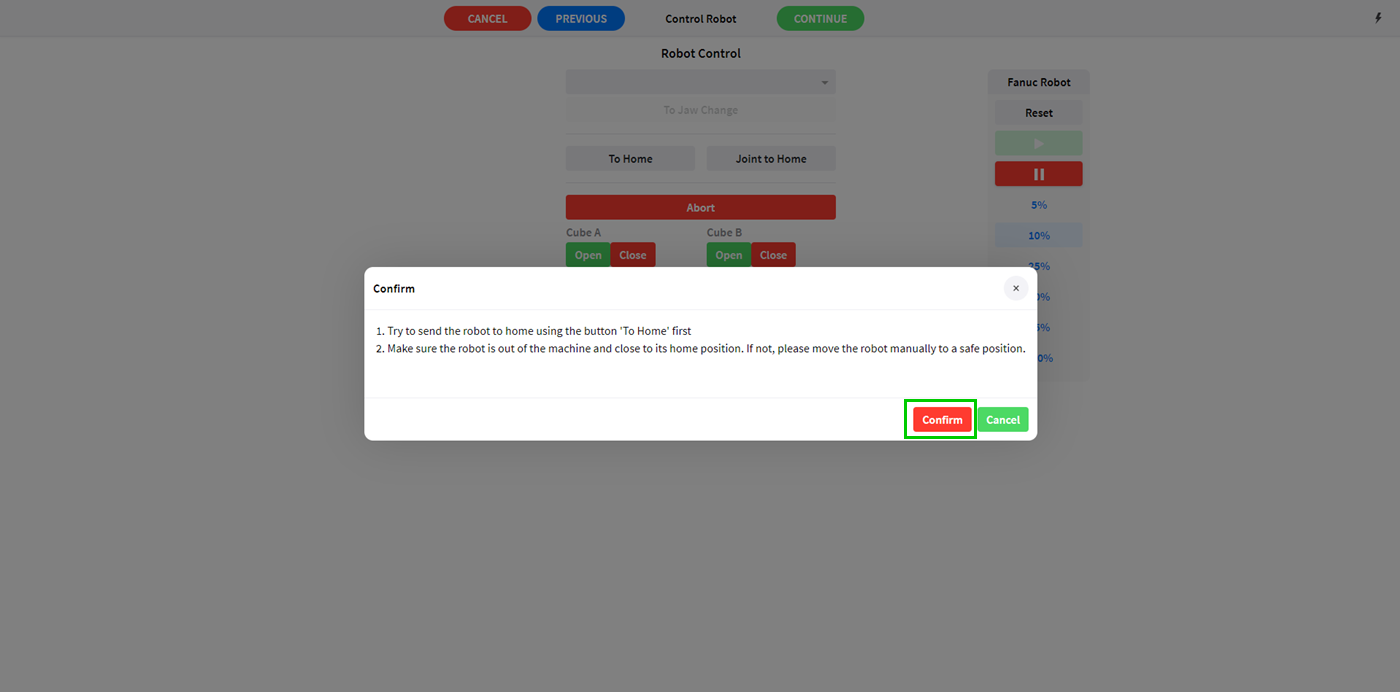
Le logiciel affiche une fenêtre contextuelle pour vous avertir que vous allez directement ramener le robot à sa position initiale. Cliquez sur Confirm [Confirmer] pour permettre au robot de revenir à sa position initiale.
| Remarque |
Veillez à ce que le robot ne heurte aucun obstacle pendant son déplacement.Soyez attentif aux autres personnes, aux machines environnantes, aux obstacles éventuels et au robot en tant que tel.Veillez à ne pas endommager les câbles montés autour du robot.
Après que vous aurez cliqué sur Confirm [Confirmer], le robot entamera son retour vers la position initiale. Patientez jusqu’au retour du robot à sa position initiale.
| Info |
Si vous constatez que le robot est sur le point de heurter un élément quelconque, vous pouvez cliquer sur le bouton Pause de teinte rouge qui s’affiche du côté droit de l’écran.Ce geste aura pour effet d’interrompre le déplacement du robot.Cliquez ensuite sur Abort [Abandonner] pour annuler ce déplacement.Revenez ensuite à l’Étape 1 proposée dans le présent document.
Après le retour du robot à sa position initiale, cliquez sur Continue [Continuer].Ensuite, déverrouillez le robot et cliquez à nouveau sur Continue.

3. Comment obtenir de l’aide supplémentaire
N’hésitez pas à nous contacter lorsque vous avez besoin d’une assistance supplémentaire au-delà des documents fournis dans la base de connaissances du service RoboJob.
Vous pouvez contacter le service RoboJob Service en utilisant les moyens suivants:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Téléphone: +32 15 70 89 70
Nous vous prions de bien vouloir nous fournir les informations suivantes:
-
Numèro de sèrie xx-xx-xxx
-
Description de l’erreur ou de la piëce dèfectueuse
-
Message ou code d’erreur exact
-
Qu’a fait le robot
-
Qu’Ètait-il supposè faire
-
Photos ou vidèos
Vous pouvez nous envoyer ces informations par e-mail.Pour envoyer des fichiers volumineux, vous pouvez utiliser un service de transfert de fichiers comme WeTransfer: robojob.wetransfer.com.
Une confirmation automatique vous sera envoyée dès réception de votre courrier.