Manual to home - Turn-Assist
|
The robot is in an unknown location and for some reason cannot move automatically to the home position.This document describes how to move the robot manually back to it’s home position. |
1. Use following tools
|
|
|

2. Procedure
2.1. Set the robot to manual mode
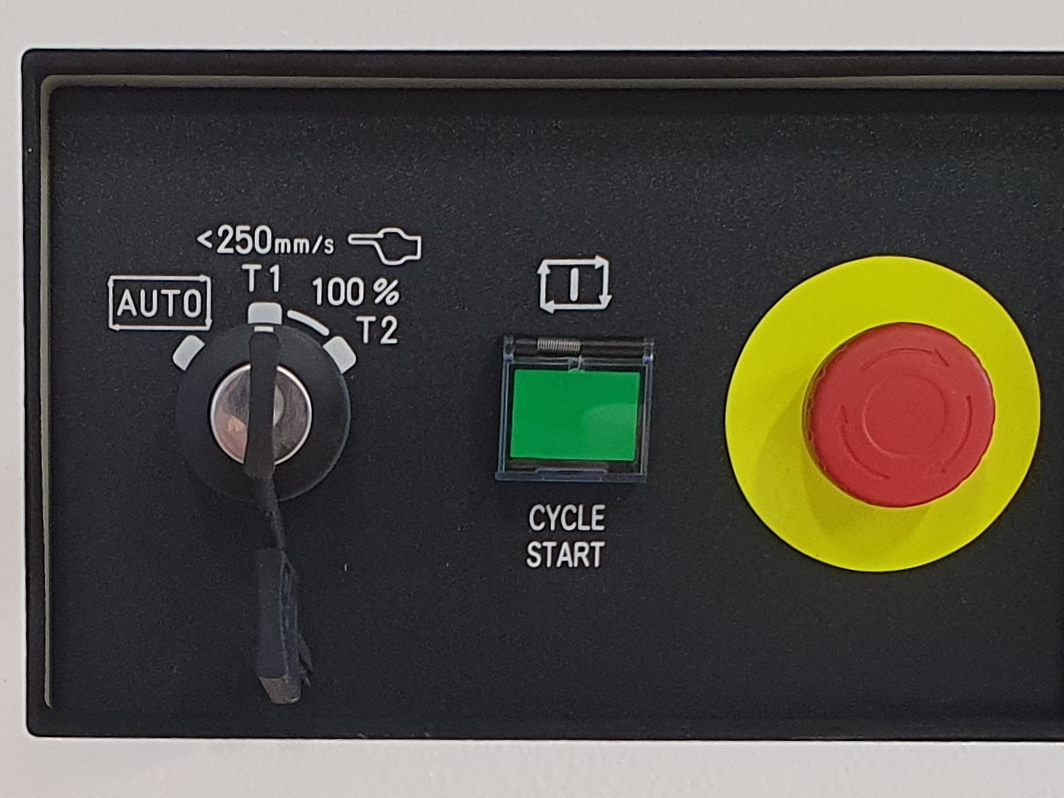
Put the three-position switch on the Robot Controller to T1.
Put the two-position switch on the Teach Pendant to On.

2.2. Enable manual movement by stopping the robot software
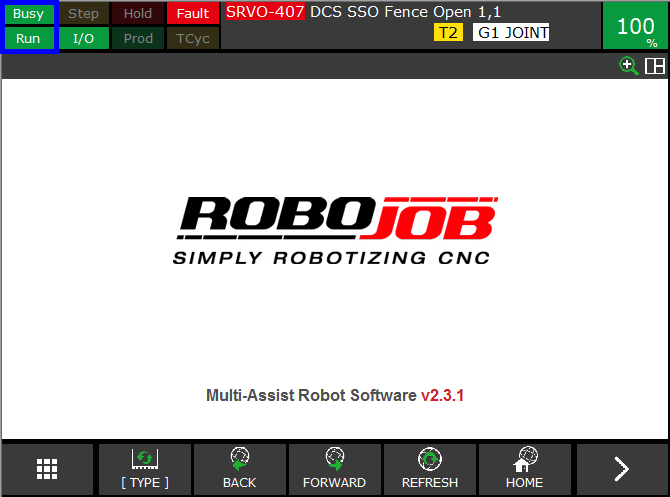
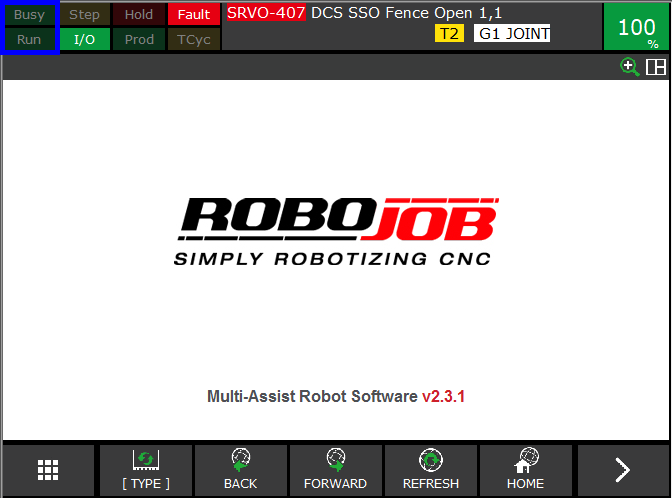
Notice the Busy and Run indicators on the top left of the teach pendant screen.At this moment they should be green, indicating that the robot software is running.
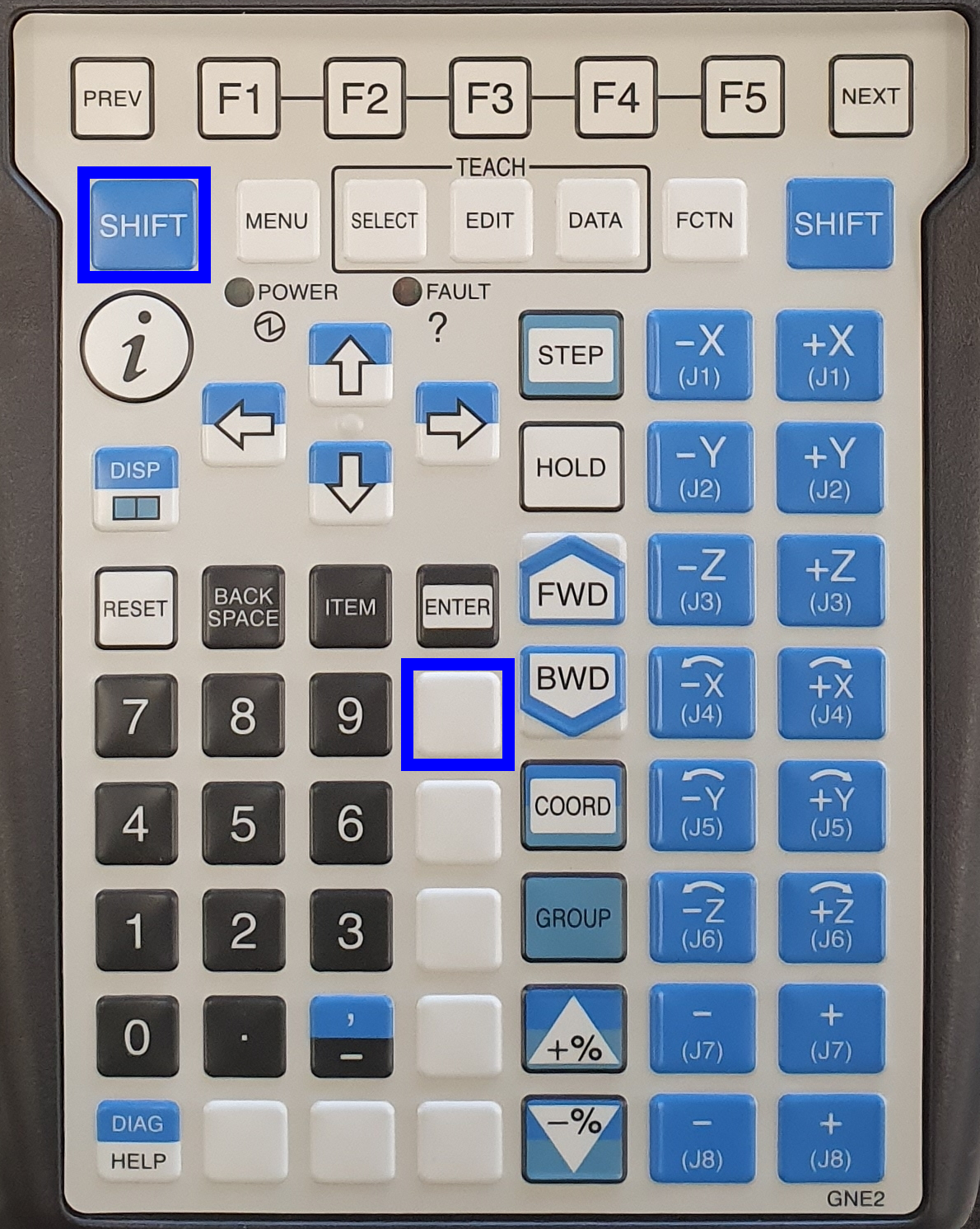
Press SHIFT + the blank button (tool 1) under ENTER to stop the robot software.
The Busy and Run indicators on the top of the teach pendant should become inactive.
2.3. Reset all Faults
To move the robot in a safe way, one deadman switch on the back of the Teach Pendant must be in the safe middle position.
Both deadman switches have 3 positions:
-
Not pressed
-
Safe middle position
-
Fully pressed
Try if you can feel the three positions.To be able to reset the error and move the robot, only one of the two deadman switches has to be in the safe middle position.So don’t push too hard or too soft!
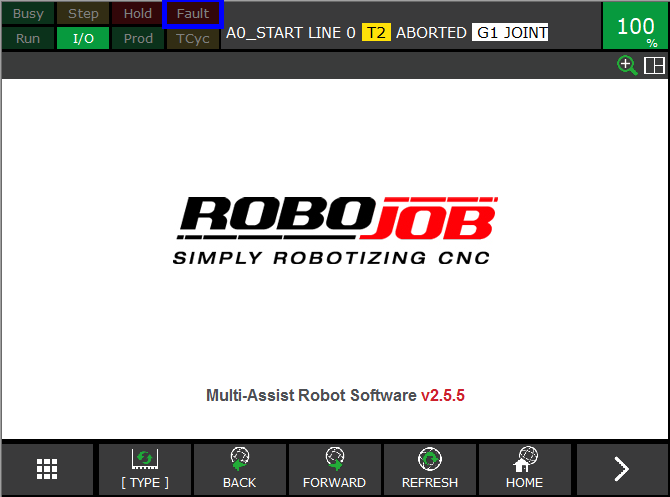
Press the SHIFT button together with the RESET button to clear all faults.
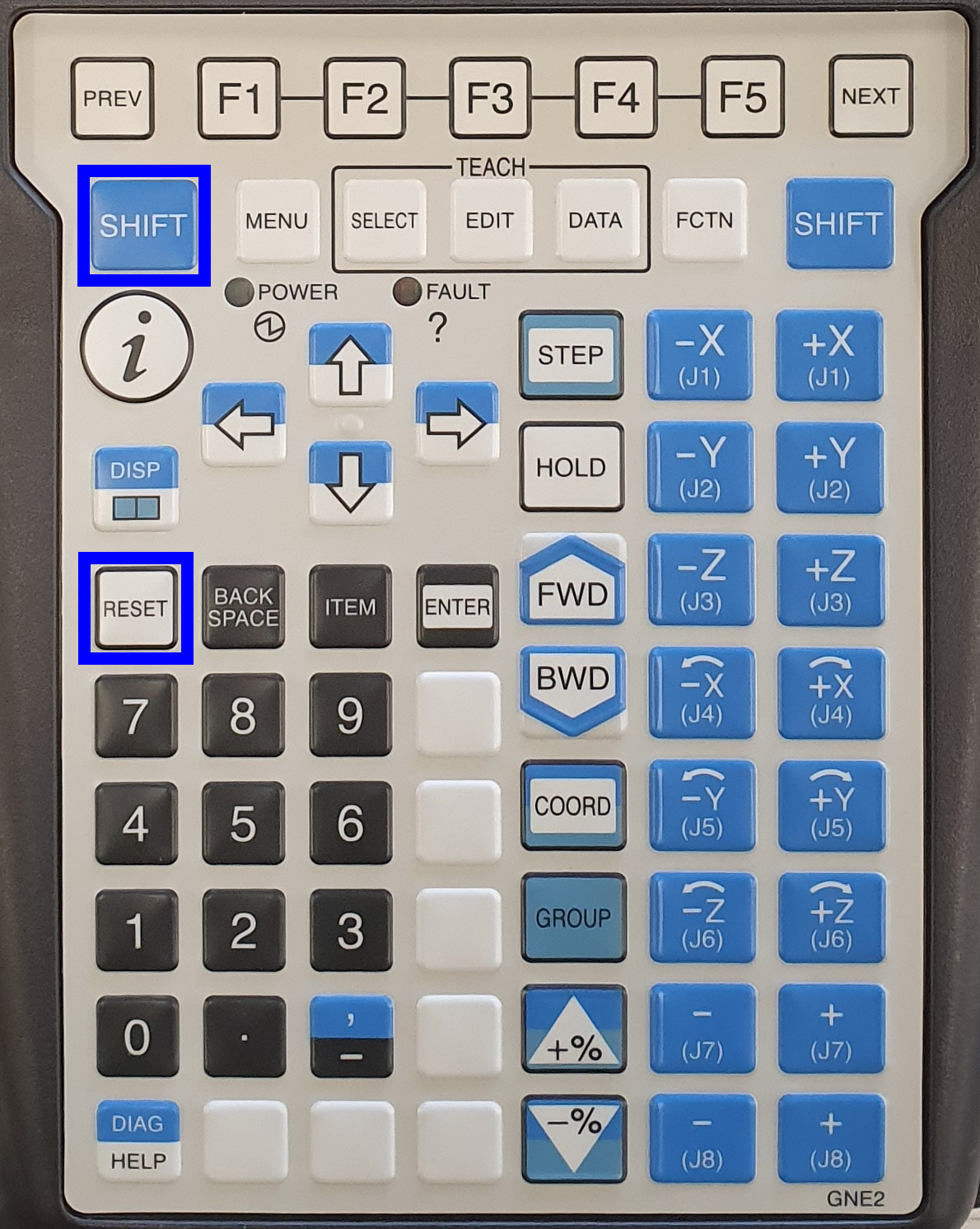
The fault indicator on the top of the teach pendant should become inactive.
2.4. Move the robot manually
|
Make sure that the robot doesn’t hit anything during the movement.Watch out for other people, surrounding machines, other objects and the robot itself.Make sure the dress out cables around the robot don’t get damaged. |
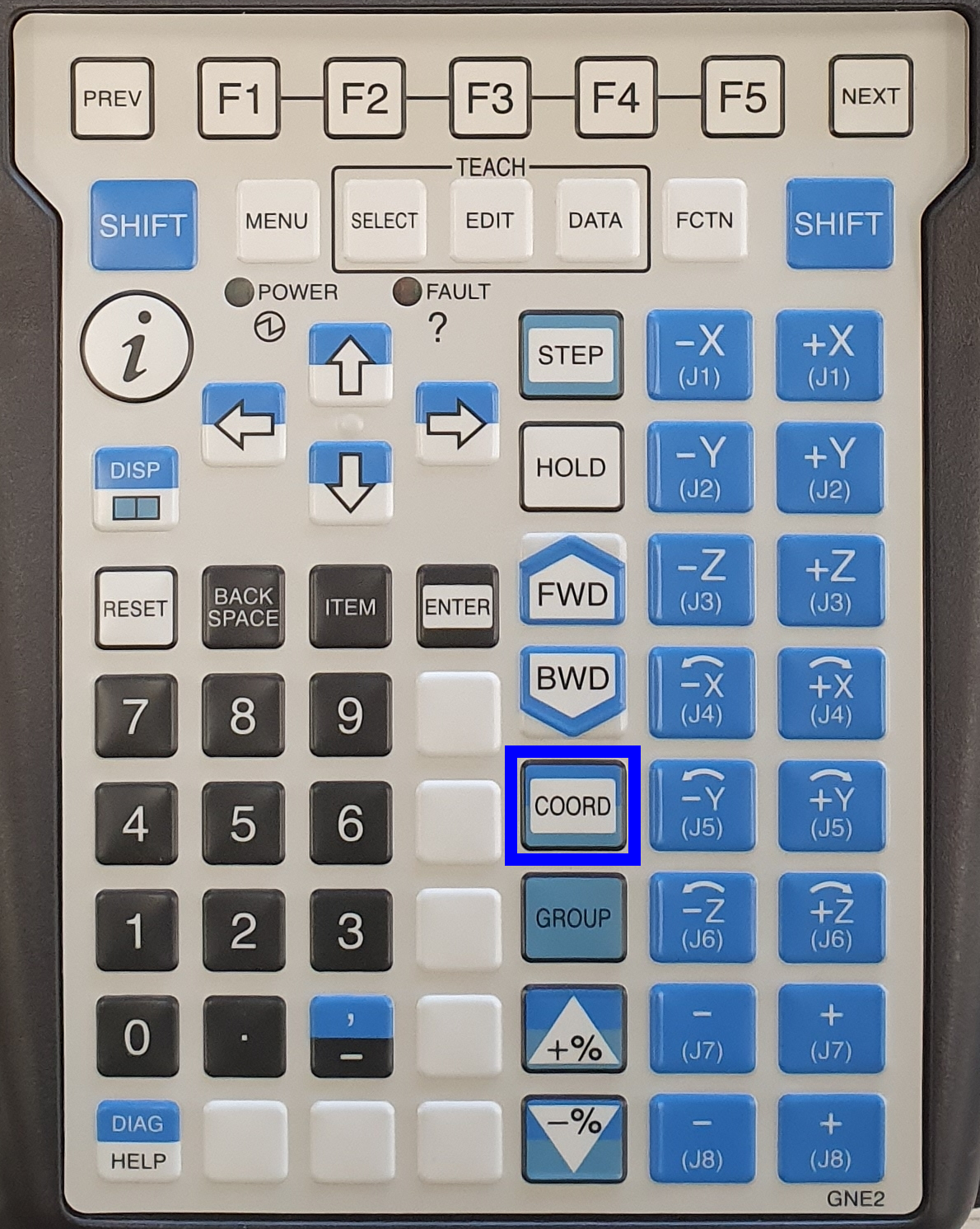
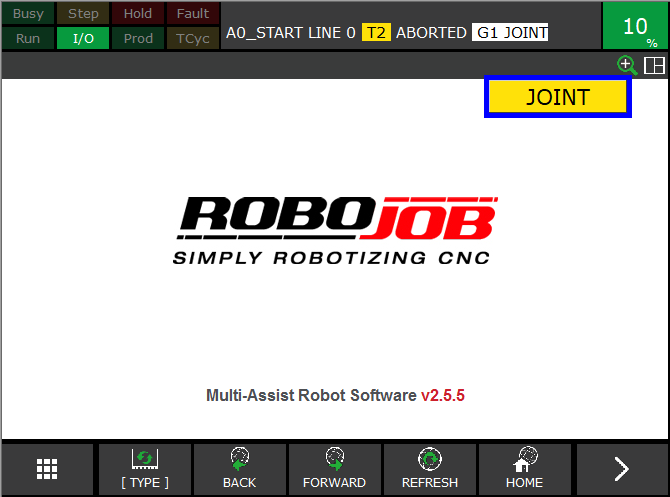
Press COORD to change the way of moving.Keep pressing until JOINT is selected.The JOINT movement mode is the easiest to work with.You can move the joints one by one.
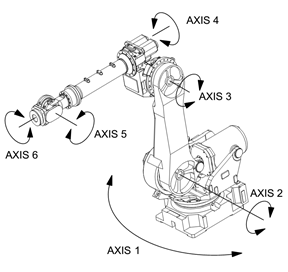
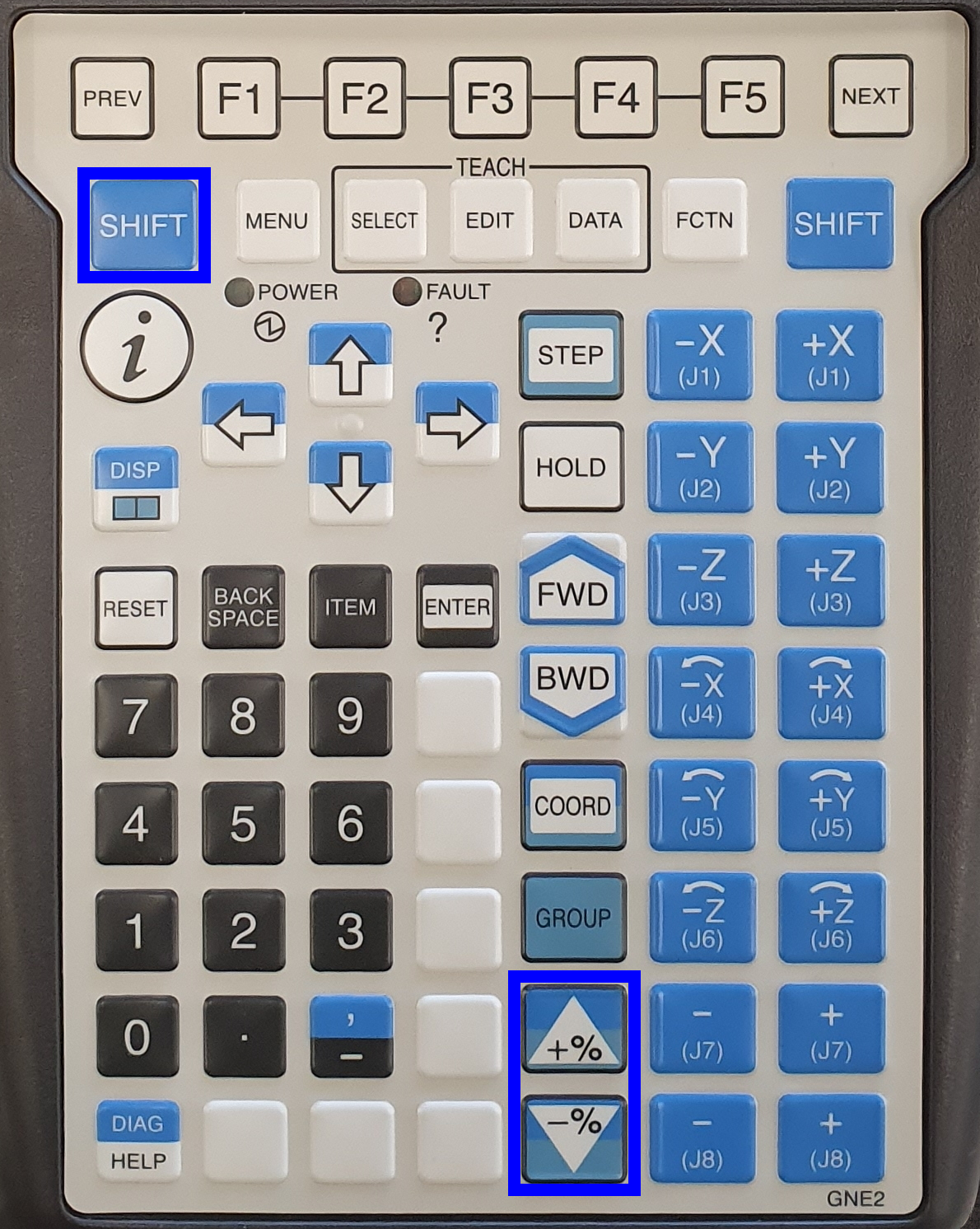
Press SHIFT + ±J1-8 to move the robot.
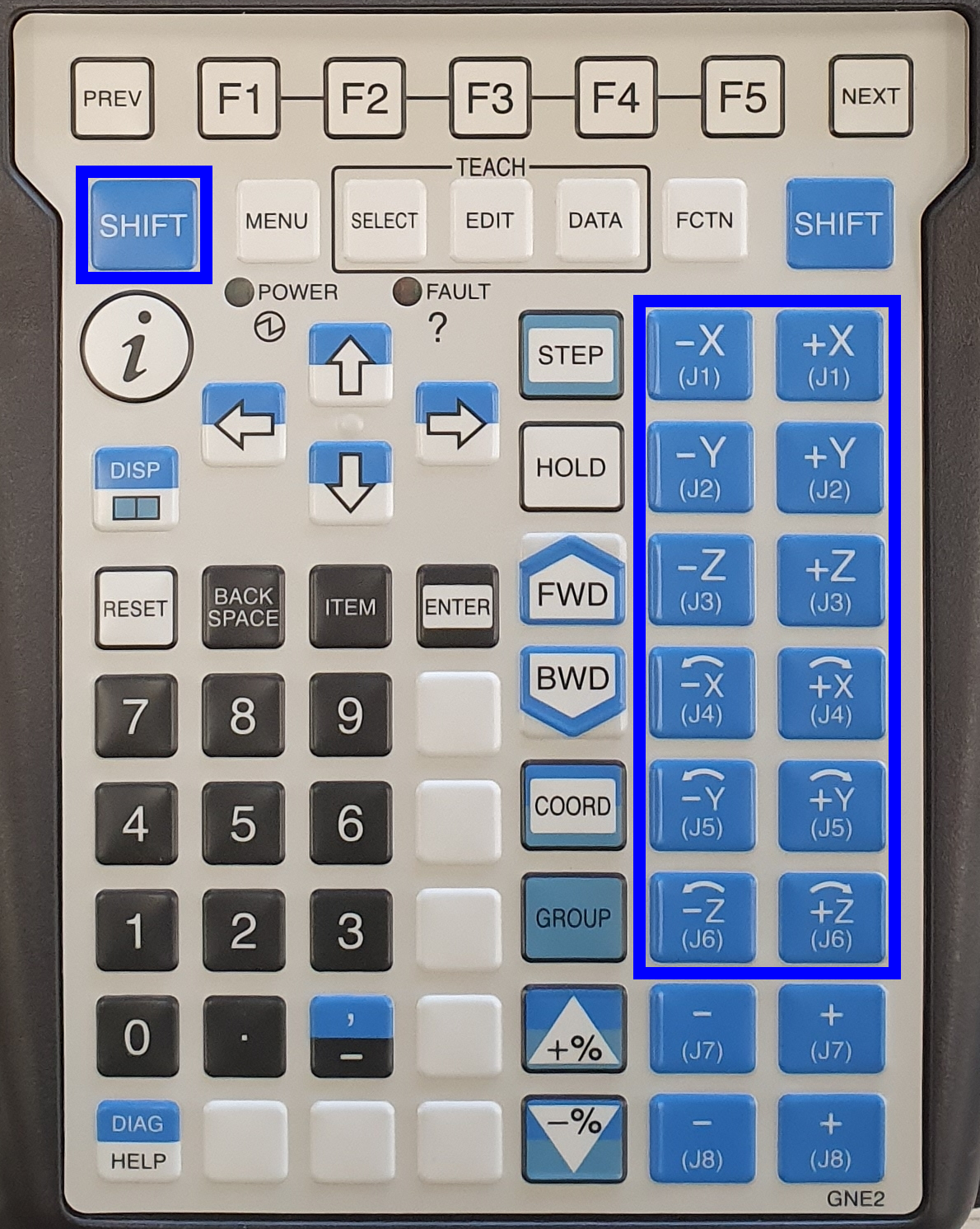
Press SHIFT + +% or -% to adjust the speed.
2.5. Manually send the robot to it’s home position
The robot program A5_MANUALTOHOME is designed to send the robot to it’s exact home position.
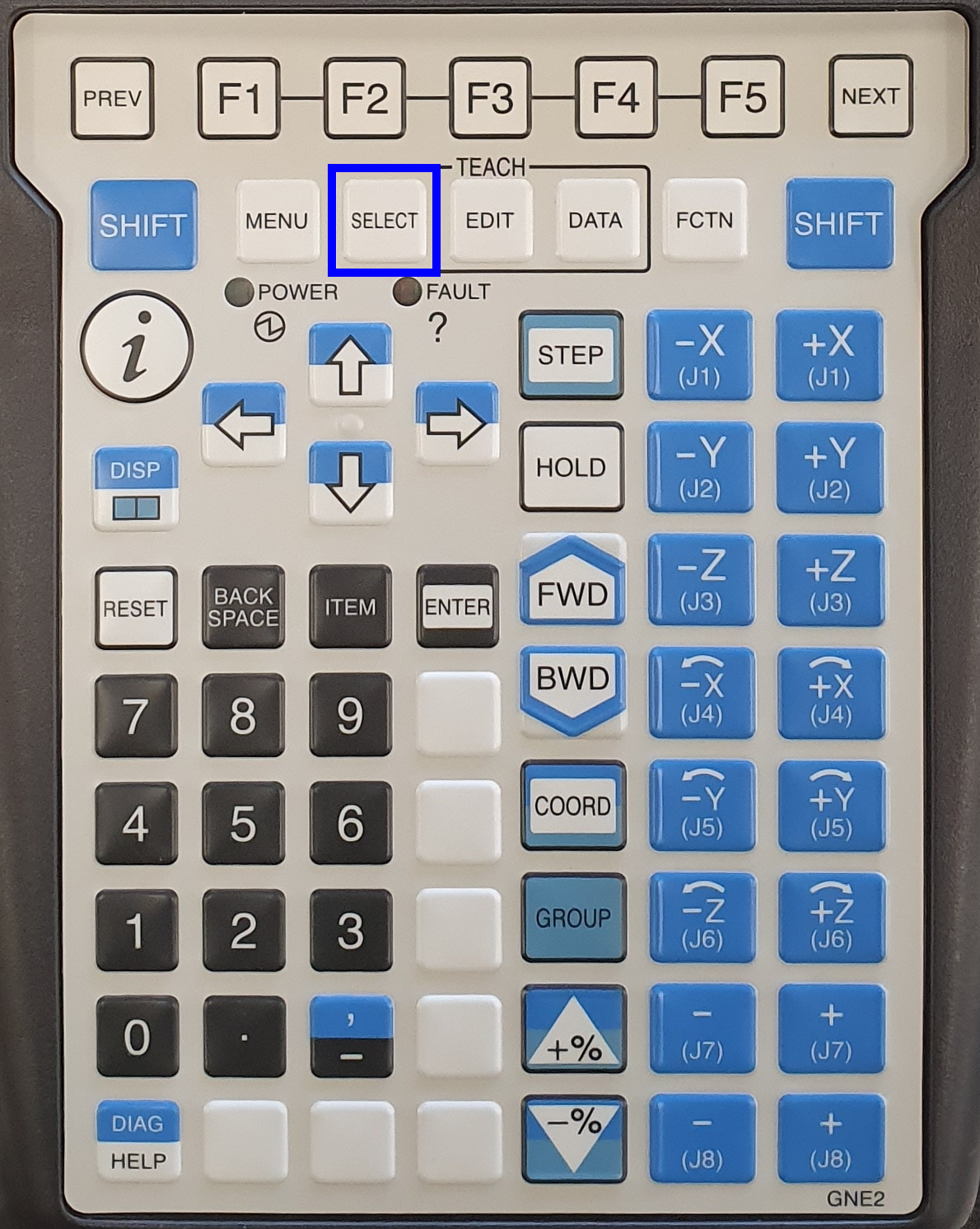
Press select on the Teach Pendent to open the list with available programs and select A5_MANUALTOHOME using the up- and down buttons.
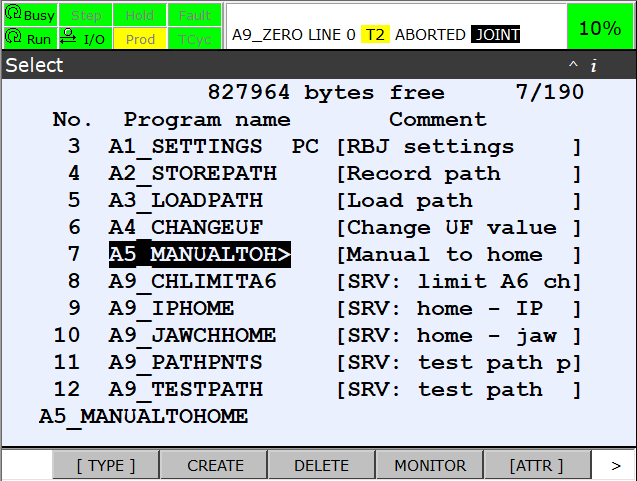
When A5_MANUALTOHOME is selected, press ENTER to open it.
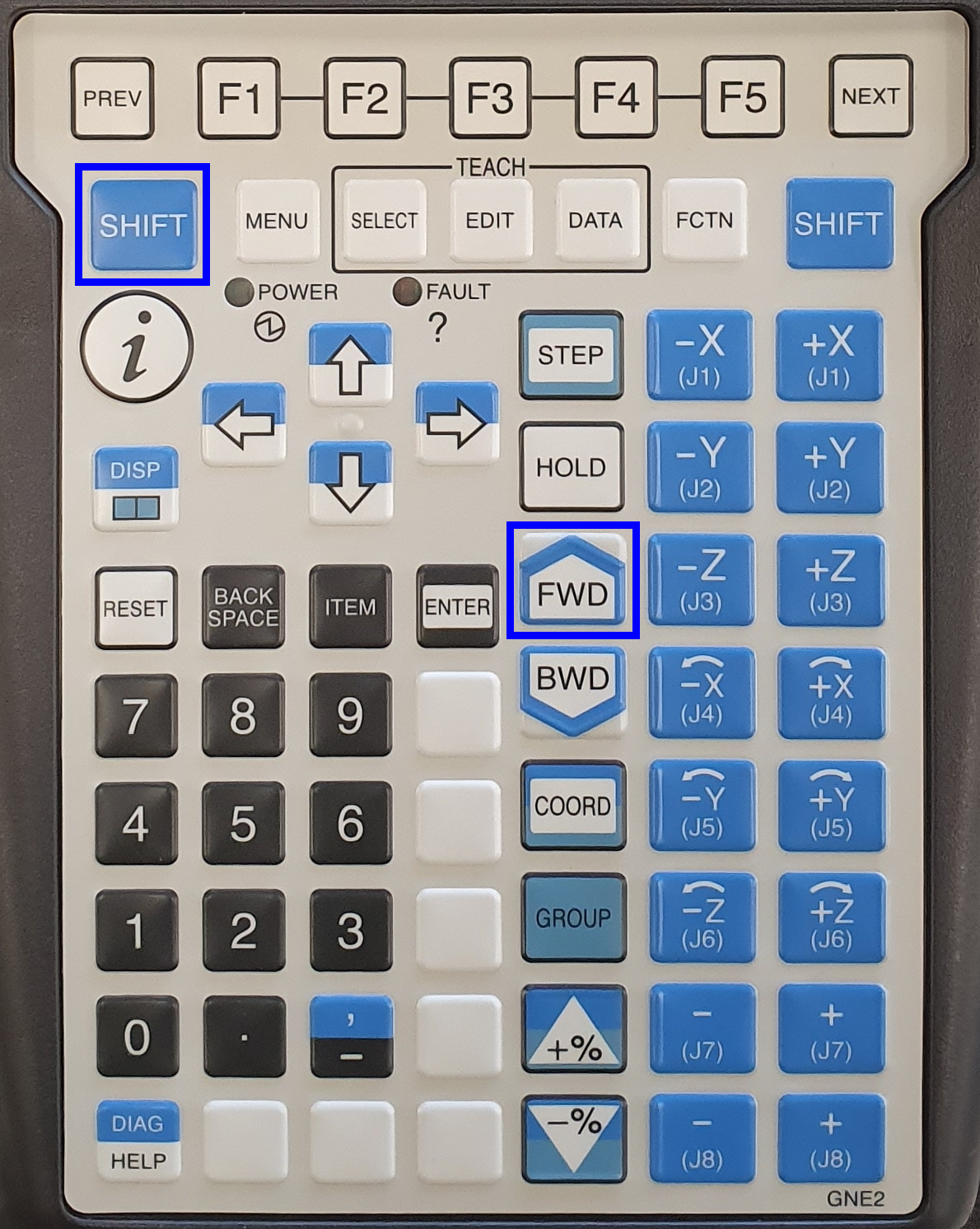
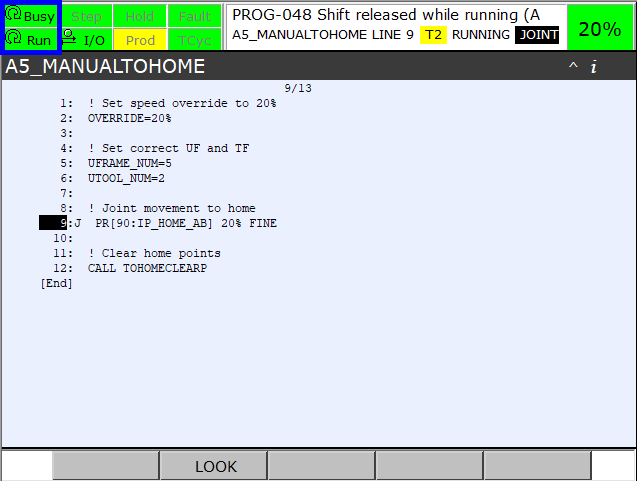
With A5_MANUALTOHOME opened, activate the deadman switch and press SHIFT + FWD to execute the program.
The robot will start moving to the exact home position.Release the SHIFT button or the deadman switch to stop the movement when needed.
|
Make sure that the robot doesn’t hit anything during the movement.Watch out for other people, surrounding machines, other objects and the robot itself.Make sure the dress out cables around the robot don’t get damaged. |
During the movement, the Busy and Run indicators will become green.
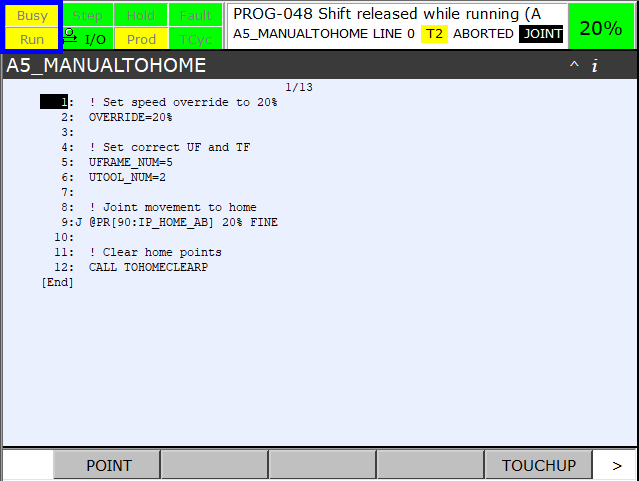
When the robot has reached the home position, the indicators Busy and Run will become yellow again and the first line of the program will be selected.
2.6. Switch back to auto mode
Put the three-position switch on the Robot Controller to AUTO.

Put the two-position switch on the Teach Pendant to Off.

Make sure that Step mode is inactive. Use the STEP button to toggle step mode.
2.7. Restart the robot software
To restore the communication with the IPC, the robot software must be started again.The easiest way to accomplish this is to reboot the robot controller and IPC by cycling power.
3. How to get further help
Do not hesitate to contact us when you need additional support beyond the documents provided in the RoboJob Service Knowledge Base.
You may contact the RoboJob Service department using following means:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Phone: +32 15 70 89 70
We kindly ask you to provide us the following information:
-
Serial number xx-xx-xxx
-
Description of the fault or defective part
-
Exact error code or message
-
What did the robot do
-
What was the robot supposed to do
-
Pictures or videos
You can send this information to us via email.To send large files you may make use of a file transfer service like WeTransfer: robojob.wetransfer.com.
An automatic confirmation will be sent upon receipt of your mail.