SRVO-038 Pulse mismatch
|
This document describes how to recover from a SRVO-038 Pulse mismatch alarm.The alarm is triggered when the encoder pulse count detected at power on is different from the one stored at power-off. This can happen when the stored pulsecoder value is changed, for example by loading a backup.The error can also be triggered when the robot is moved while it is turned off, this can happen when the holding brake is defective on one of the axis. |
1. Use following tools
|
|

2. Procedure
2.3. Set Master done to true
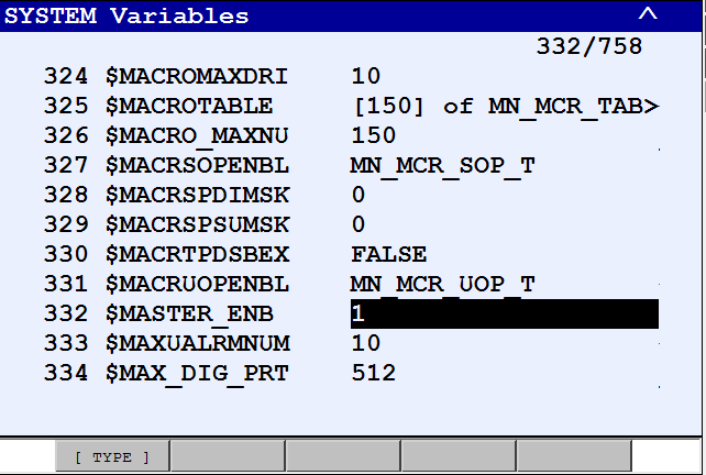
MENU > NEXT > SYSTEM > VARIABELE,$DMR_GRP[1].$MASTER_DONE = TRUE
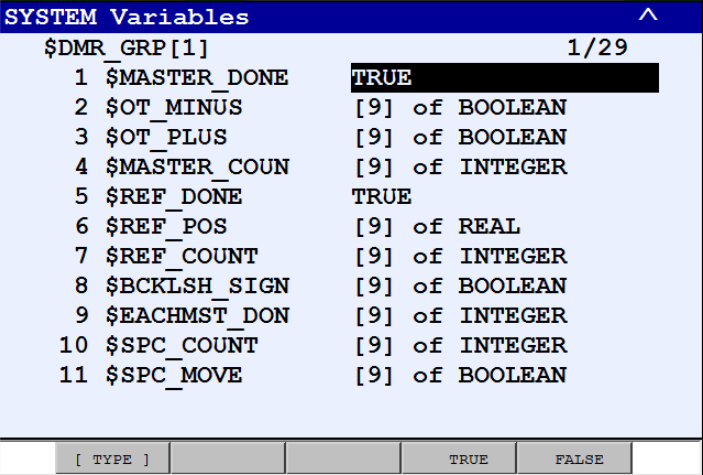
|
See if the variabel stays on TRUE, otherwise repeat RES_PCA |
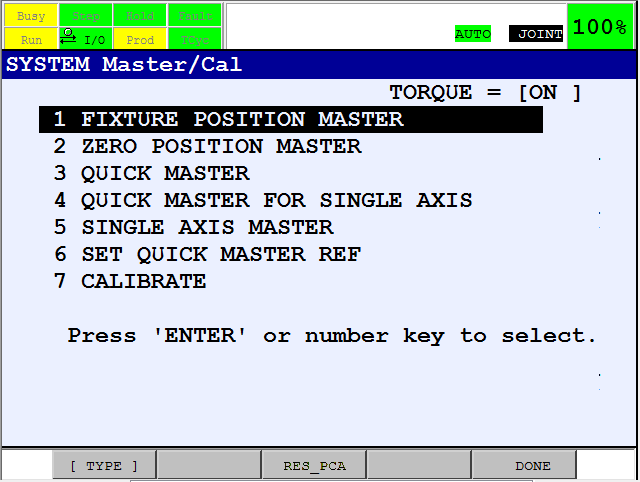
2.4. Calibrate the robot
MENU > NEXT > SYSTEM > MASTER/CALL, CALIBRATE
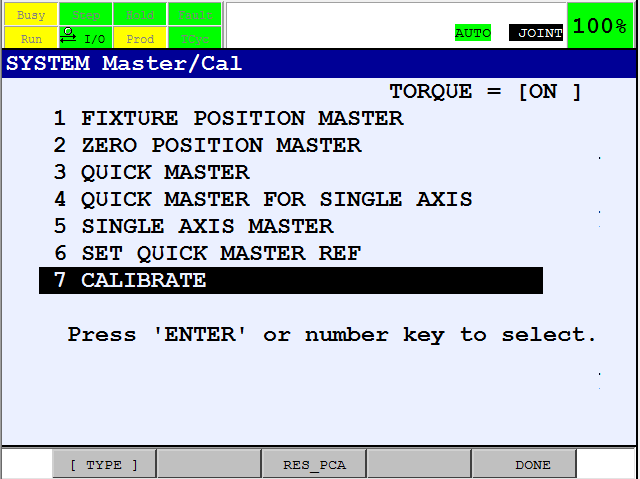
|
Confirm with YES and see if the display shows 'ROBOT CALIBRATED' |
3. How to get further help
Do not hesitate to contact us when you need additional support beyond the documents provided in the RoboJob Service Knowledge Base.
You may contact the RoboJob Service department using following means:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Phone: +32 15 70 89 70
We kindly ask you to provide us the following information:
-
Serial number xx-xx-xxx
-
Description of the fault or defective part
-
Exact error code or message
-
What did the robot do
-
What was the robot supposed to do
-
Pictures or videos
You can send this information to us via email.To send large files you may make use of a file transfer service like WeTransfer: robojob.wetransfer.com.
An automatic confirmation will be sent upon receipt of your mail.