Set a gripper as fixed in the IPC-software - Mill-Assist
|
You do not want to teach the robot every time you restart. This can be done by indicating that the gripper is fixed. When vacuum grippers are used, the process has to be teached every time the software is started. Sometimes the grippers are not correctly configured so the software thinks it is necessary to teach every time. To avoid this, the grippers can be indicated as fixed gripper. With fixed grippers the robot will memorize the previous teached values so you do not have to teach again. Follow the next procedure. |
1. Use following tools
|
|

2. Procedure
2.1. Start the IPC
Power on the IPC and start the software.
2.2. Open the settings of the grippers
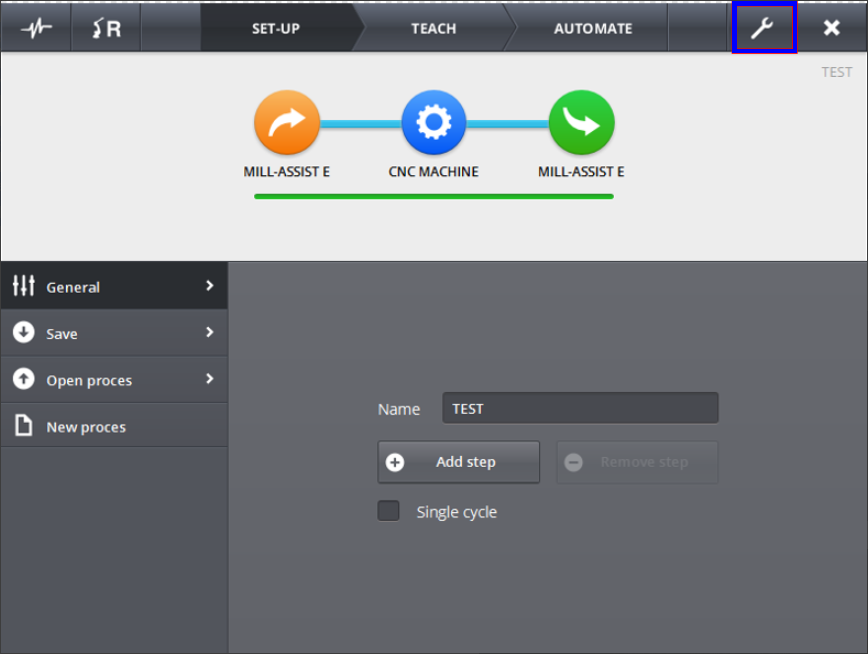
Open the settings of the grippers by clicking on the settings icon in the top right on the IPC.
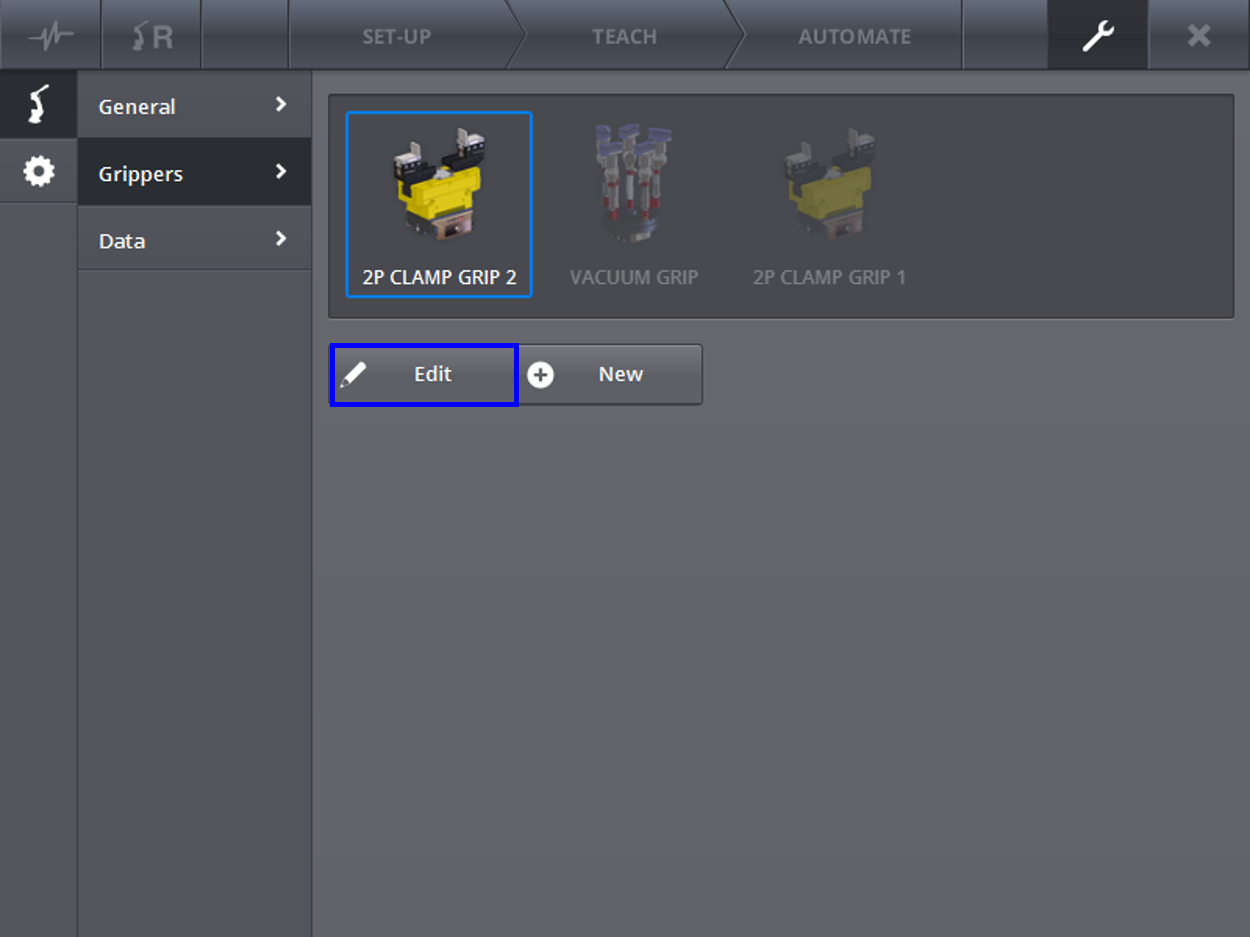
Click on the robot icon and then on 'Grippers'.
2.3. Set the proper gripper
Select the gripper you want to fix configure as fixed and click on 'Edit' to change the settings.
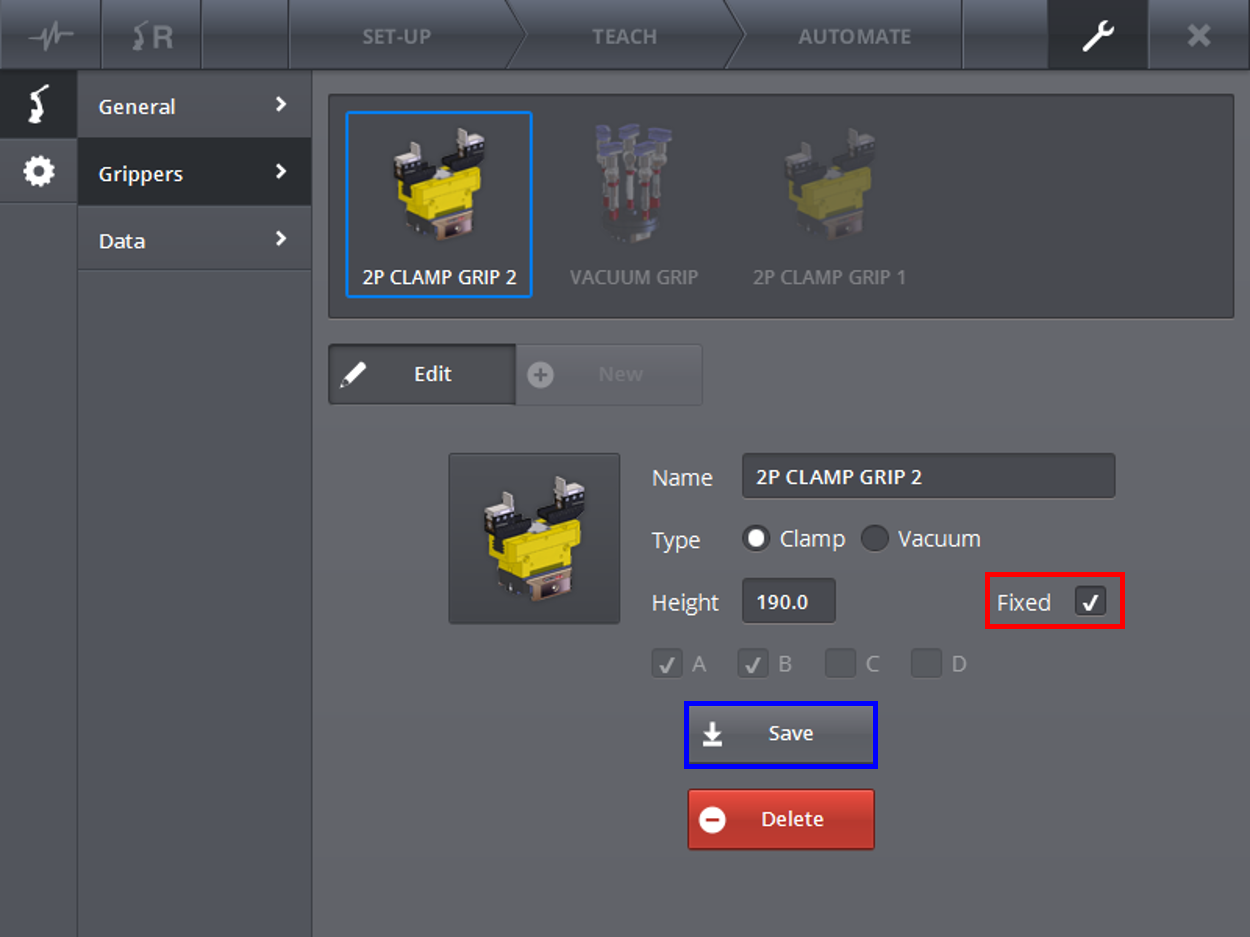
Check the box next to 'Fixed' to set the gripper as fixed.
Save the settings.
Repeat this procedure for all grippers.
3. How to get further help
Do not hesitate to contact us when you need additional support beyond the documents provided in the RoboJob Service Knowledge Base.
You may contact the RoboJob Service department using following means:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Phone: +32 15 70 89 70
We kindly ask you to provide us the following information:
-
Serial number xx-xx-xxx
-
Description of the fault or defective part
-
Exact error code or message
-
What did the robot do
-
What was the robot supposed to do
-
Pictures or videos
You can send this information to us via email.To send large files you may make use of a file transfer service like WeTransfer: robojob.wetransfer.com.
An automatic confirmation will be sent upon receipt of your mail.