Calibrate cabinet sensor (SRVO-406 DCS SSO SVOFF input 1,1)
|
When the robot gives the active alarm SRVO-406 DCS SSO SVOFF input 1,1.The side panel needs to be checked if the door is closed correctly, when this is the case the sensor in the electrical cabinet needs to be calibrated. |
1. Use following tools
|
|
|
|



2. Procedure
2.1. Open Safe I/O Status
-
Push the MENU-Button and go to 0 NEXT.
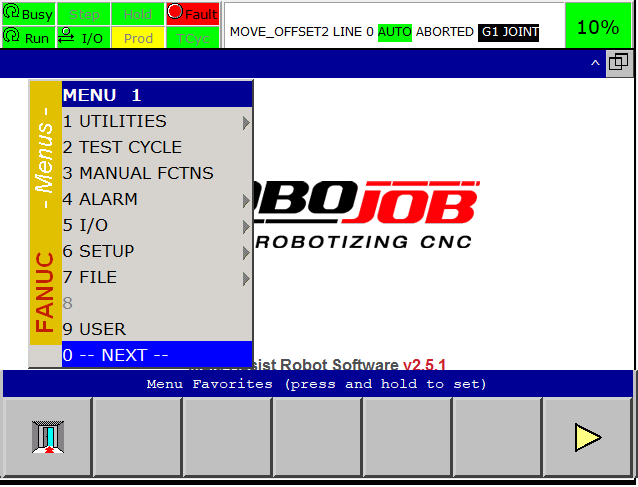
-
Go to 6 SYSTEM and then go to 7 DCS.
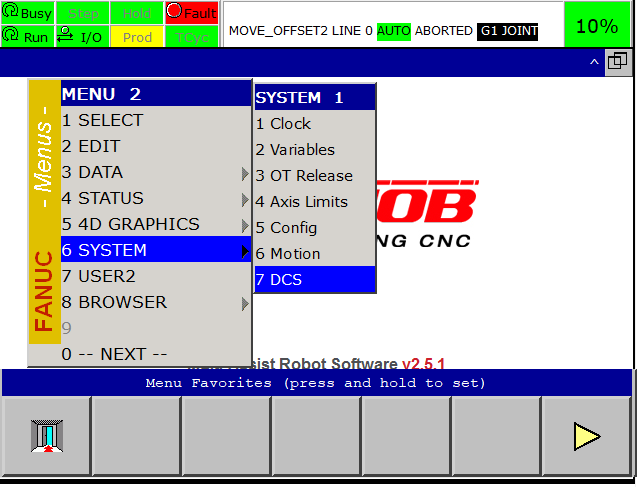
-
Go to 1 Safe I/O Status and press the DETAIL-button.
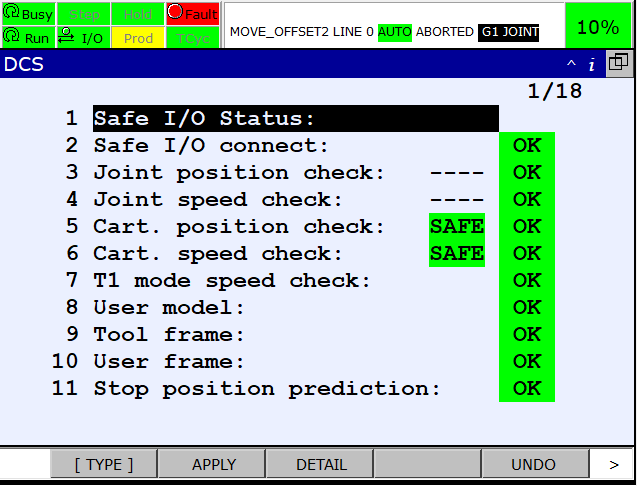
-
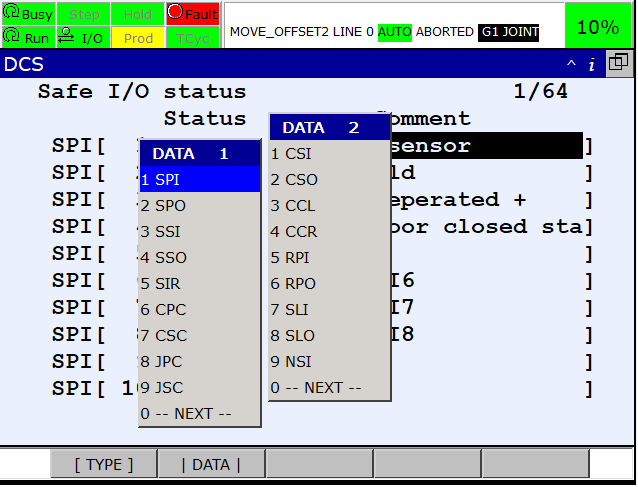
Make sure the SPI-tab is opened.
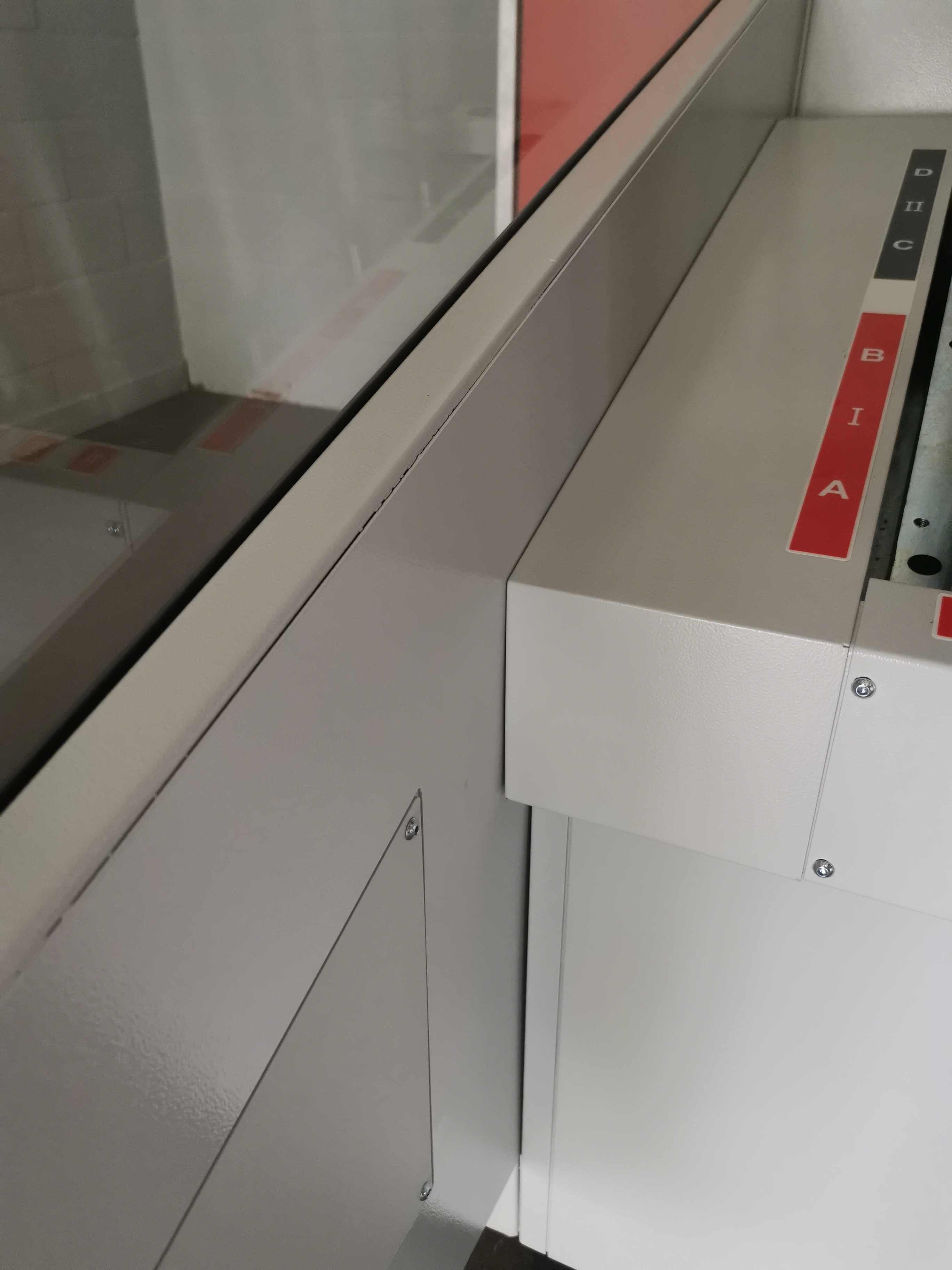
2.2. Check the side panel
-
Check that the side panel is properly closed (If this isn’t the case, close the door).

-
To close the door pull the side panel towards the stacker.
-
When the side panel is closed, use a hex key to lock the door.The bolt that needs to be tightened is located underneath the tabletop of the stacker.
-
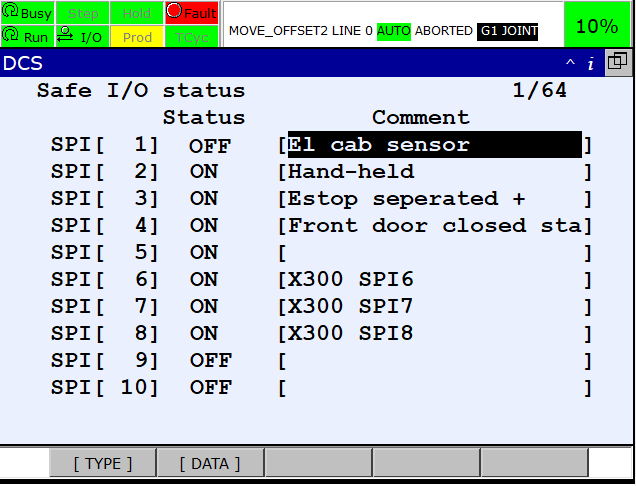
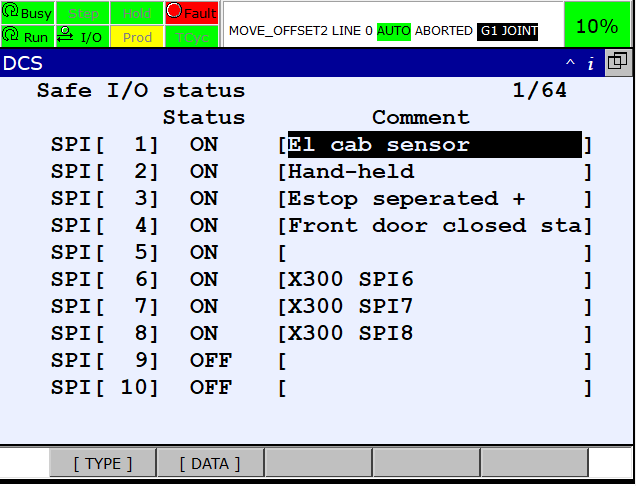
When the door is closed correctly, the status of parameter SPI[1] should be ON.If this isn’t the case (status is OFF) the sensor in the electrical cabinet needs to be calibrated.
If the status is ON some tests must be executed to check if the the sensor is accurately calibrated.
2.3. Calibrate the sensor
2.3.1. SPI[1] is OFF
If the status of parameter SPI[1] is OFF, the sensor needs to be calibrated.To do this the steps below must be performed.
-
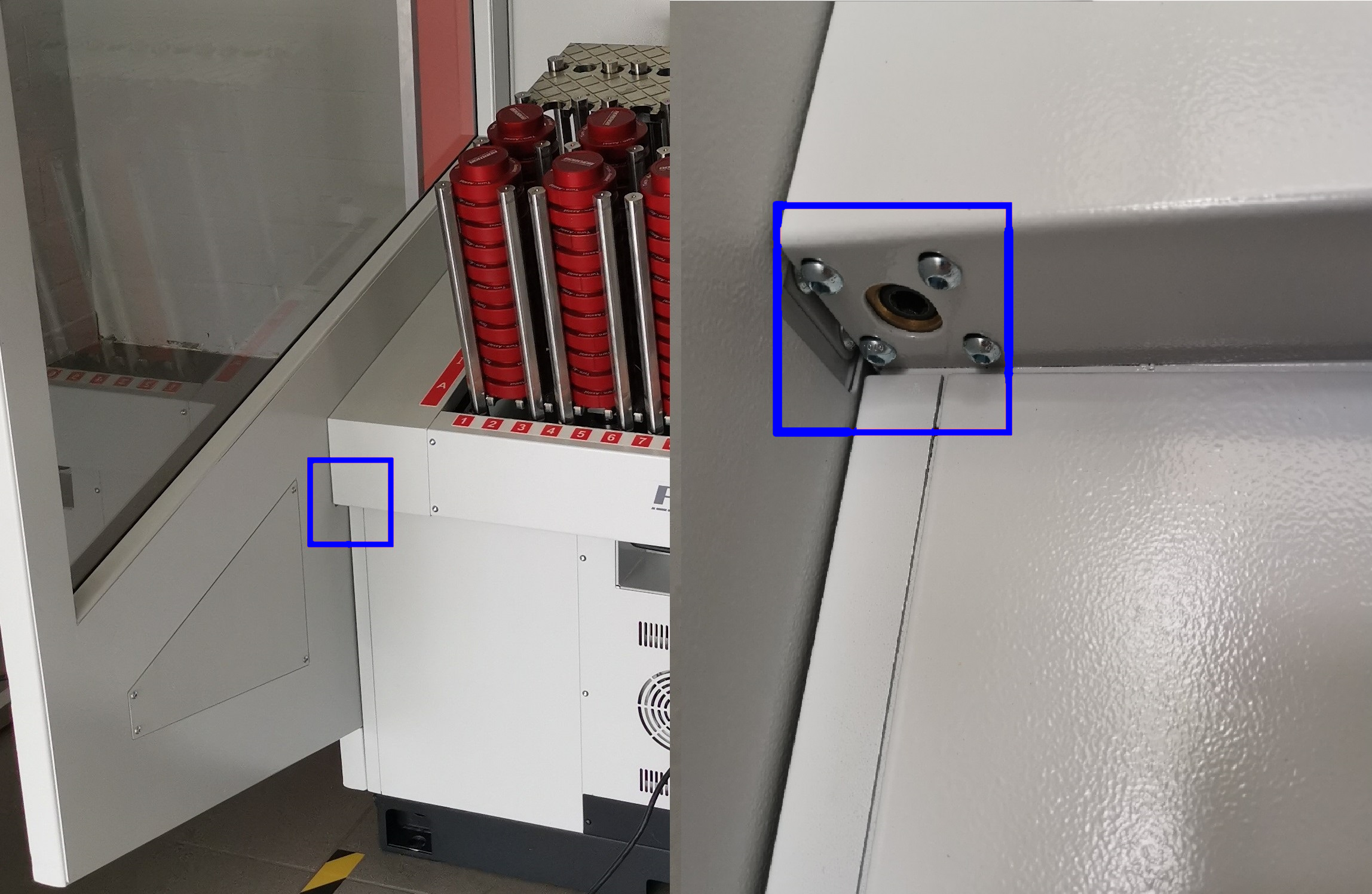
Open the door again by loosening the bolt and pull the side panel open.
-
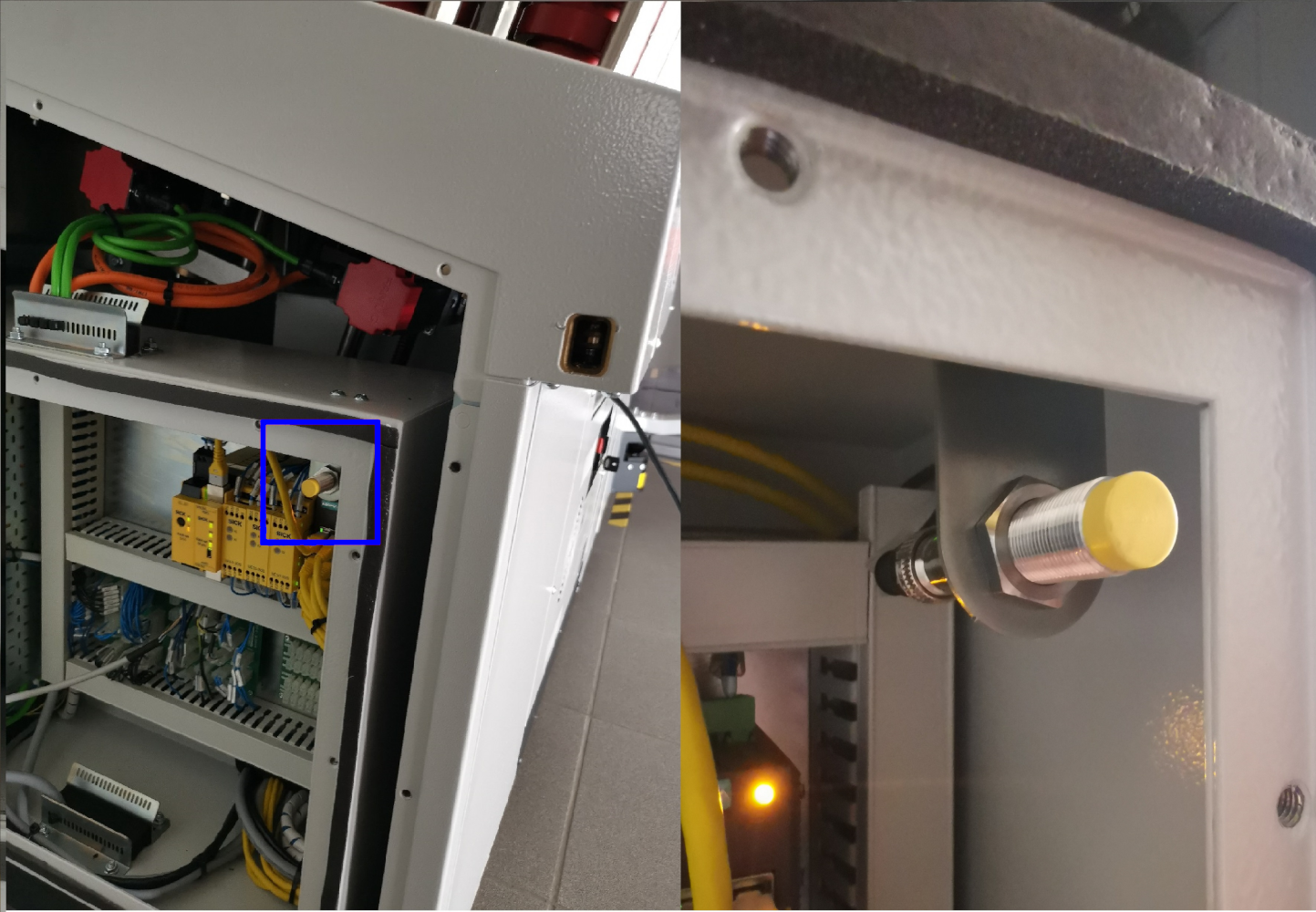
Move the sensor more to the outside.This is possible by loosening the nuts (1 in front and 1 behind the metal plate), then move the sensor and tighten the nuts again.
-
Close the door again and check if the sensor doesn’t hit the side panel when it is being closed.If this happens move the sensor a bit to the inside.
-
If the door is closed and locked, check the parameter again.If the status is still OFF move the sensor again to the outside.If the status is ON some tests must be executed to check if the sensor is accurately calibrated.
2.3.2. SPI[1] is ON
If the status of parameter SPI[1] if ON, some tests must be performed to check if the sensor is accurately calibrated.
-
Push against the edge of the side panel and check if the status stays ON.If this isn’t the case the sensor needs to be moved to the inside because the panel moves to close to the sensor.

-
Pull on the edge of the side panel and check if status stays ON.If this isn’t the case the sensor needs to be moved to the outside because the sensor moves to far from the panel.

|
If the sensor needs to be moved according to the tests just performed, these tests must be repeated again until the sensor doesn’t have to be moved again. |
3. How to get further help
Do not hesitate to contact us when you need additional support beyond the documents provided in the RoboJob Service Knowledge Base.
You may contact the RoboJob Service department using following means:
-
Help Center: service.robojob.eu
-
Email: service@robojob.eu
-
Phone: +32 15 70 89 70
We kindly ask you to provide us the following information:
-
Serial number xx-xx-xxx
-
Description of the fault or defective part
-
Exact error code or message
-
What did the robot do
-
What was the robot supposed to do
-
Pictures or videos
You can send this information to us via email.To send large files you may make use of a file transfer service like WeTransfer: robojob.wetransfer.com.
An automatic confirmation will be sent upon receipt of your mail.