Wie man der Liftanlage manuell bewegt
|
Dieses Dokument beschreibt, wie Sie die Liftanlagen von dem Tower manuell bewegen können. |
|
Wenn Sie Probleme haben, die verhindern, dass sich der Liftanlagen automatisch bewegen, sollten Sie sich zuerst an RoboJob Serviceabteilung wenden, bevor Sie die in diesem Dokument beschriebene Vorgehensweise ausprobieren. |
1. Verwenden Sie folgende Werkzeuge
|
|
|
|

2. Vorgehensweise
2.1. Vorbereitung
Bevor Sie beginnen, stornieren Sie alle geplanten jobs in der Software.Auf diese Weise hat die Software keine Möglichkeit, Befehle an den Tower zu senden.
2.2. Gurtsensoren ausschalten
Wenn die Software den Fehler LX-07: Lift Alarm: Belt-Stop gibt, müssen Sie zuerst die Gurtsensoren ausschalten.Wenn der Fehler nicht auftritt, lassen Sie die Gurtsensoren eingeschaltet.
Um die Sensoren zu deaktivieren, gehen Sie zum Elektroschrank unter dem Tower.In den meisten Fällen befindet sich dieser unter der Liftanlage auf der Roboterseite.

Im Schaltschrank befindet sich neben der SPS ein Schalter.

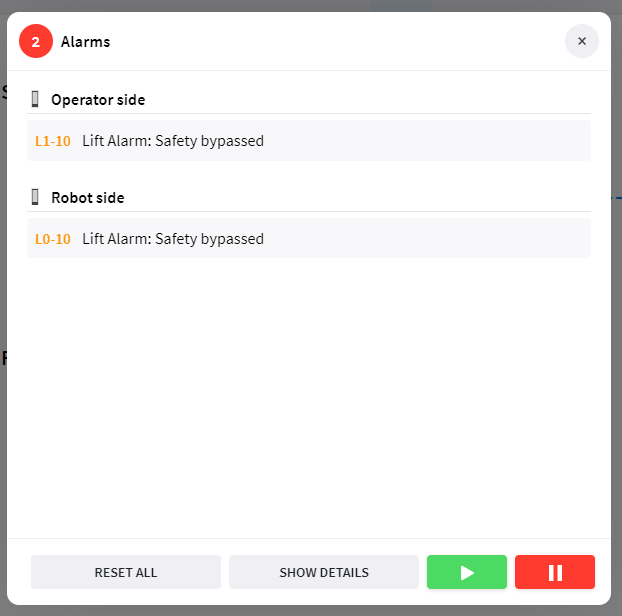
Nach der Deaktivierung des Gurtsensors wird ein Fehler LX-10 angezeigt, der besagt, dass die Sicherheit umgangen wurde.Wenn dieser Fehler angezeigt wird, bedeutet dies, dass Sie es richtig gemacht haben.
|
Safety Bypassed umfasst nur die Gurtsensoren. Lichtschranke oder Sicherheitsbarriere können den Aufzug immer noch an der Fahrt hindern. |
2.3. Die Liftanlage bewegen
2.3.1. Zurücksetzen aller Fehler
Bevor die Liftanlage bewegt werden können, müssen alle Fehler zurückgesetzt werden.Wenn Sie die Gurtsensoren deaktiviert haben, kann der Fehler *LX-10 nicht zurückgesetzt werden.Dieser Fehler verhindert nicht, dass sich die Liftanlage bewegen.
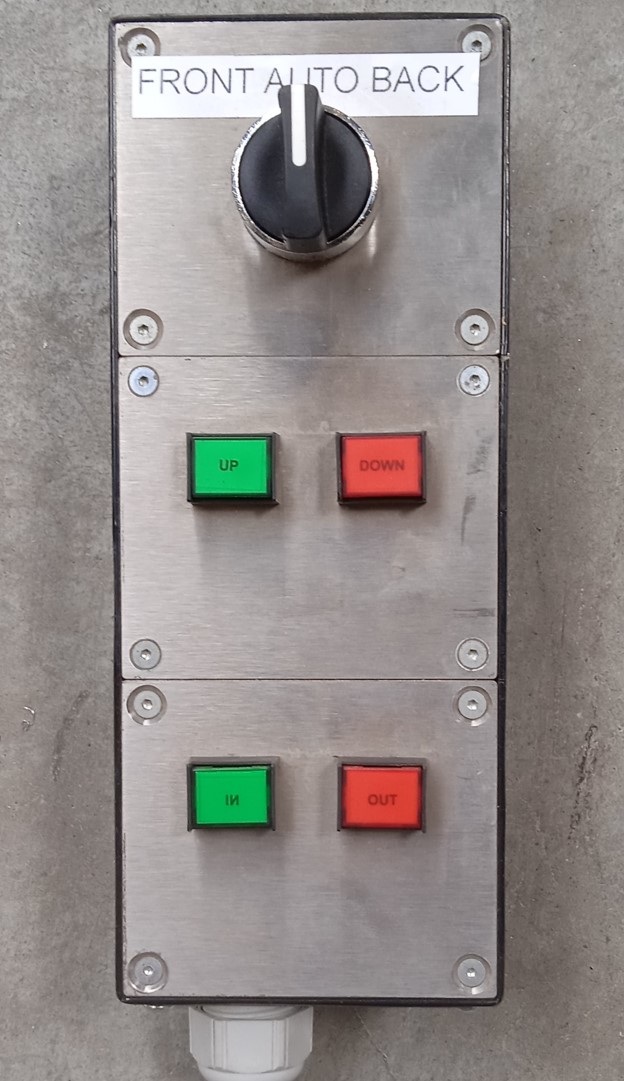
2.3.2. Verwendung die Handbedienung

Es gibt 3 Modi auf die Handbedienung.
-
FRONT:Mit Front können Sie die Liftanlage auf der *Roboterseite steuern.
-
AUTO:Auto lässt Sie nichts bewegen, sondern überlässt die Steuerung dem TowerPLC.
-
BACK:Mit Back können Sie die Liftanlage auf der Bedienerseite. Steuern.

Auf und ab steht für vertikale Bewegung.
Rein und raus ist für horizontale Bewegung.
|
Wenn die Liftanlage nicht bewegt, wenn Sie es erwarten, könnte es sein, dass ein Fehler vorliegt.Überprüfen Sie den Fehlerbildschirm auf Fehler und versuchen Sie, ihn zurückzusetzen. |
3. So erhalten Sie weitere Hilfe
Zögern Sie nicht, uns zu kontaktieren, wenn Sie zusätzliche Unterstützung benötigen, die über die in der RoboJob Service Knowledge Base bereitgestellten Dokumente hinausgeht.
Sie können die RoboJob-Serviceabteilung auf folgende Weise kontaktieren:
-
Help Center: service.robojob.eu
-
E-Mail: service@robojob.eu
-
Telefon: +49 7134 9199 543
Wir bitten Sie, uns folgende Informationen zur Verfügung zu stellen:
-
Seriennummer xx-xx-xxx
-
Beschreibung des mangelhaften oder defekten Teils
-
Genauer Fehlercode oder Nachricht
-
Was hat der Roboter getan
-
Was sollte der Roboter tun
-
Bilder oder Videos
Sie können diese Informationen per E-Mail an uns senden.Um große Dateien zu senden, können Sie einen Dateiübertragungsdienst wie WeTransfer verwenden: robojob.wetransfer.com.
Eine automatische Bestätigung wird nach Erhalt Ihrer Mail gesendet.