Keine Antwort von Geräten Generation 2
|
In diesem Dokument werden die Schritte zur Fehlerbehebung erläutert, die zur Untersuchung von Verbindungsproblemen durchgeführt werden können.Diese Probleme werden normalerweise durch die folgenden Fehlermeldungen angezeigt: Keine Antwort von Gerät(en) oder Keine Verbindung zu Gerät(en). |
1. Verwenden Sie folgende Werkzeuge
|
|
|
|
|
|
|
|
|
|





2. Vorgehensweise
2.1. Alle Gerät neu starten
Starten Sie alle Geräte neu: Das integrierte RoboJob-System, Device Interface und Maschine. Bei einem getrennten System können der IPC, die Robotersteuerung und der Staplertisch separat neu gestartet werden.Die Software könnte sich in einem ungültigen Zustand befinden und kann durch einen Neustart des Geräts zurückgesetzt werden.
Vergewissern Sie sich nach dem Neustart der Software, dass alle Geräte eingeschaltet sind und funktionieren.Die Software auf dem IPC kann gestartet werden und sollte sich automatisch mit allen anderen Geräten verbinden. Wenn das Verbindungsproblem weiterhin besteht, schließen Sie die Software und fahren Sie mit dem nächsten Schritt fort.
2.2. Ping test
Mit einem Ping-Test kann überprüft werden, ob das Netzwerk korrekt konfiguriert ist.Ein erfolgreicher Ping-Test bedeutet, dass eine grundlegende Kommunikation mit dem Gerät möglich ist.Möglicherweise ist das Netzwerk aber immer noch unzuverlässig oder es liegt ein Problem mit der Software vor.
Öffnen Sie die Bildschirmtastatur auf dem IPC oder schließen Sie eine USB-Tastatur an.
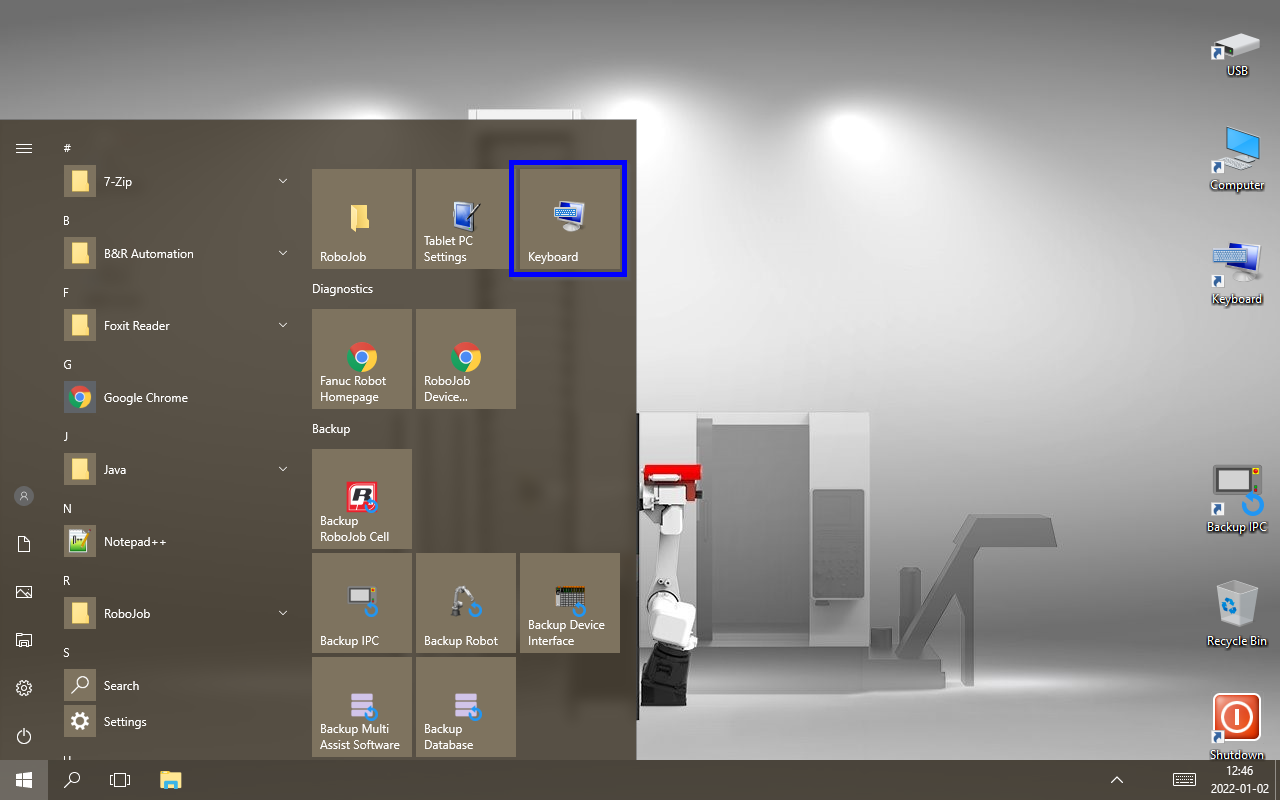
Öffnen Sie das Startmenü und geben Sie 'Run' ein … drücken Sie die Verknüpfung 'Run', um ein Ausführungsfenster zu öffnen.
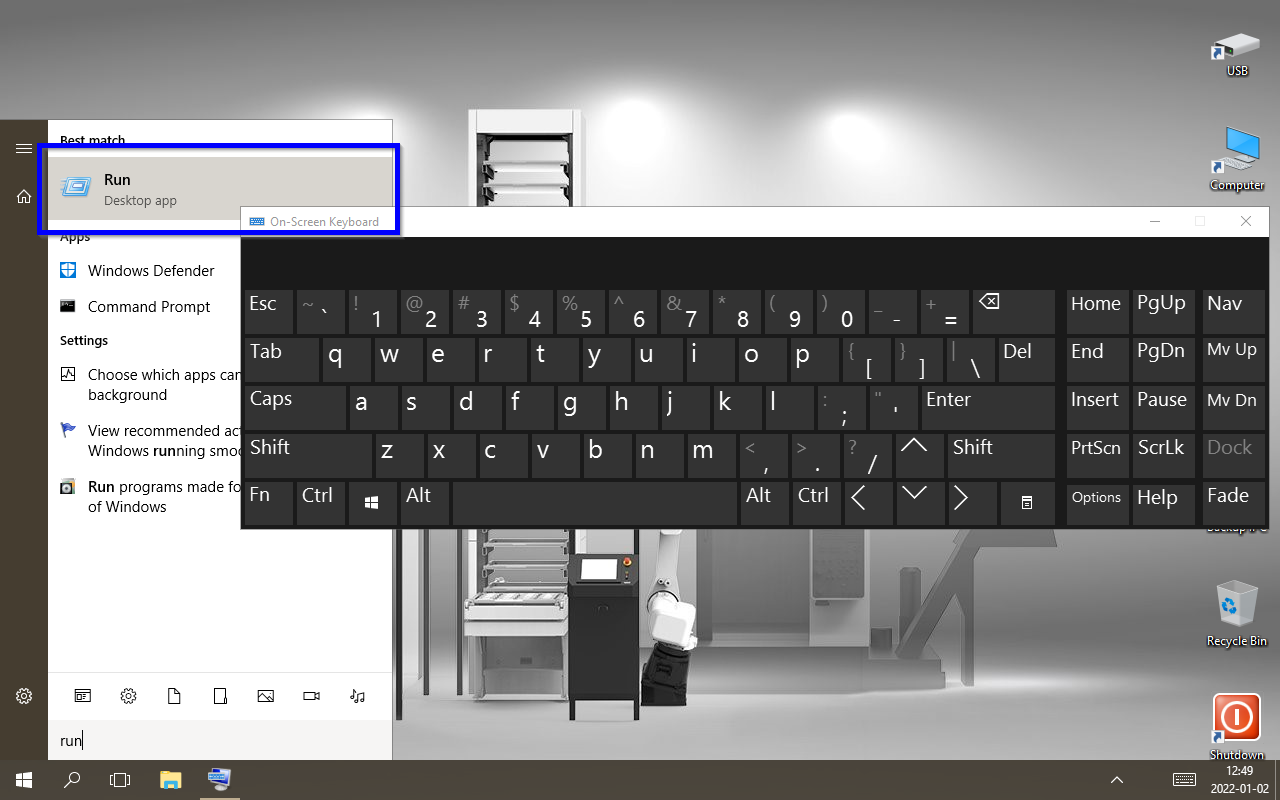
Geben Sie cmd.exe ein und drücken Sie die Eingabetaste, um eine Eingabeaufforderung zu öffnen(Command prompt).
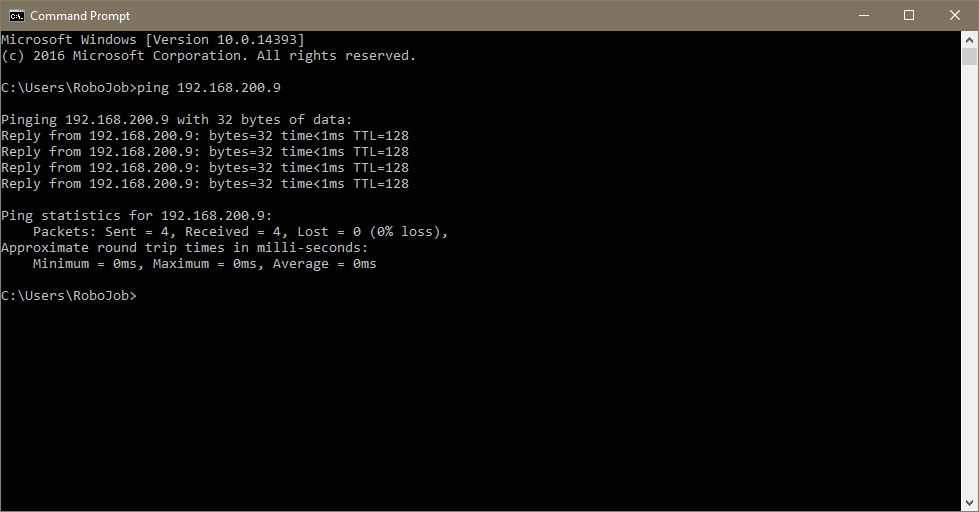
Geben Sie ping gefolgt von der IP-Adresse des Geräts ein, das Sie testen möchten, und drücken Sie die Eingabetaste, um es anzupingen.Geben Sie zum Beispiel 'ping 192.168.200.9' ein, um die Verbindung mit dem Roboter zu prüfen.
Standard IP-adresses:
| Device | Adress | Port |
|---|---|---|
|
IPC (software console) |
192.168.200.4 |
- |
|
Device Interface (Machine) |
192.168.200.6 |
2010 |
|
Robot Controller |
192.168.200.9 |
2001(instant comm) |
|
Robot Controller |
192.168.200.9 |
2003(status comm) |
|
Conveyor |
192.168.200.10 |
2020 |
|
Sick Flexisoft Master CPU* |
192.168.200.20 |
- |
|
Sick Scanner* |
192.168.200.21 |
- |
|
Sick Flexisoft 2nd CPU* |
192.168.200.22 |
- |
*Optional
Wenn das Gerät antwortet, werden in der Ausgabe die Testergebnisse angegeben: Bytecount, Round-Trip-Zeit, …Dies bedeutet, dass eine grundlegende Kommunikation möglich ist.Das Problem wird höchstwahrscheinlich durch ein Softwareproblem verursacht.
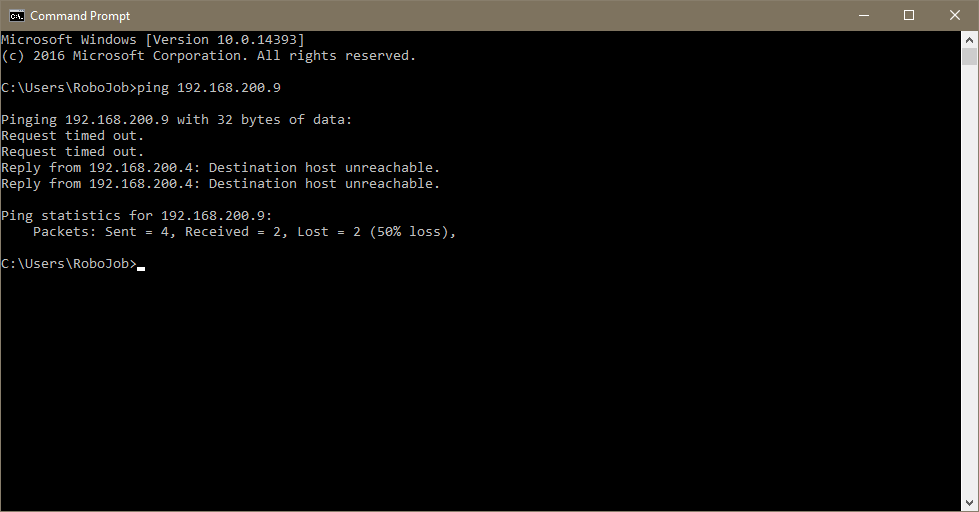
Wenn keine Antwort erfolgt, wird in der Ausgabe Destination host unreachable angezeigt.Dies bedeutet, dass selbst die einfachste Kommunikation nicht möglich ist.Das Problem ist höchstwahrscheinlich ein elektrisches: lose Verbindungen, beschädigte Kabel, …
2.3. Überprüfen der Softwarekonfiguration
Überprüfen Sie, ob die IP-Adressen und Portnummern in der Software korrekt konfiguriert sind.Diese Einstellungen können nur geändert werden, wenn Softwareänderungen vorgenommen werden.
2.4. Ethernet-Kabel prüfen
Überprüfen Sie, ob alle Kabel angeschlossen sind.Stellen Sie sicher, dass keine Kabel unterbrochen, gebrochen oder in irgendeiner Weise beschädigt sind.
Alle Kabel sind mit einem zentralen Ethernet-Switch verbunden, der sich im Staplertisch befindet.
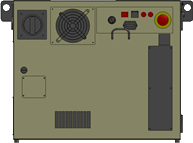
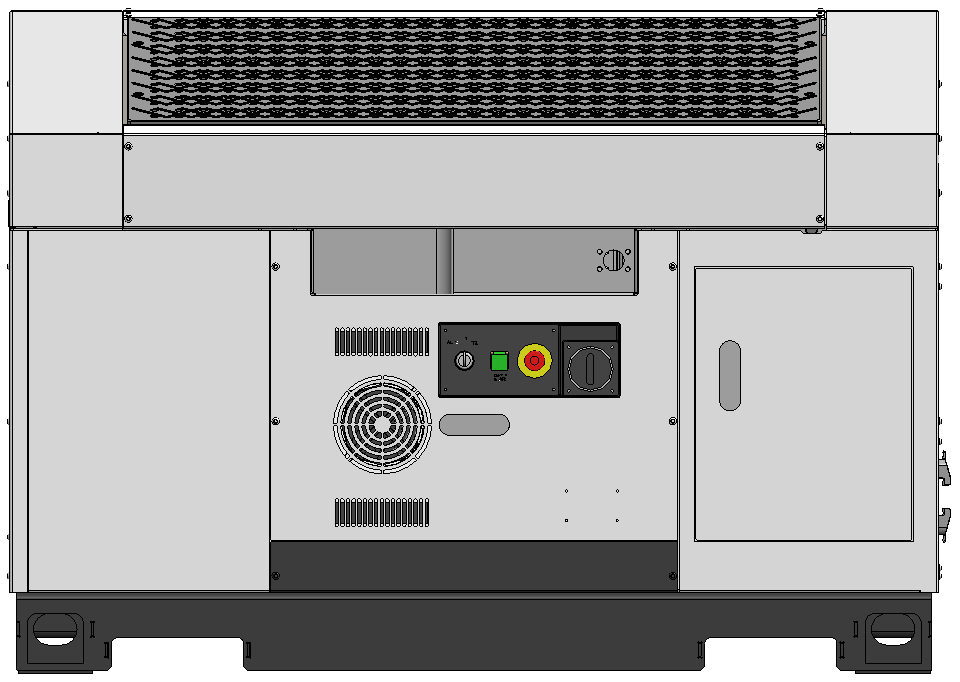
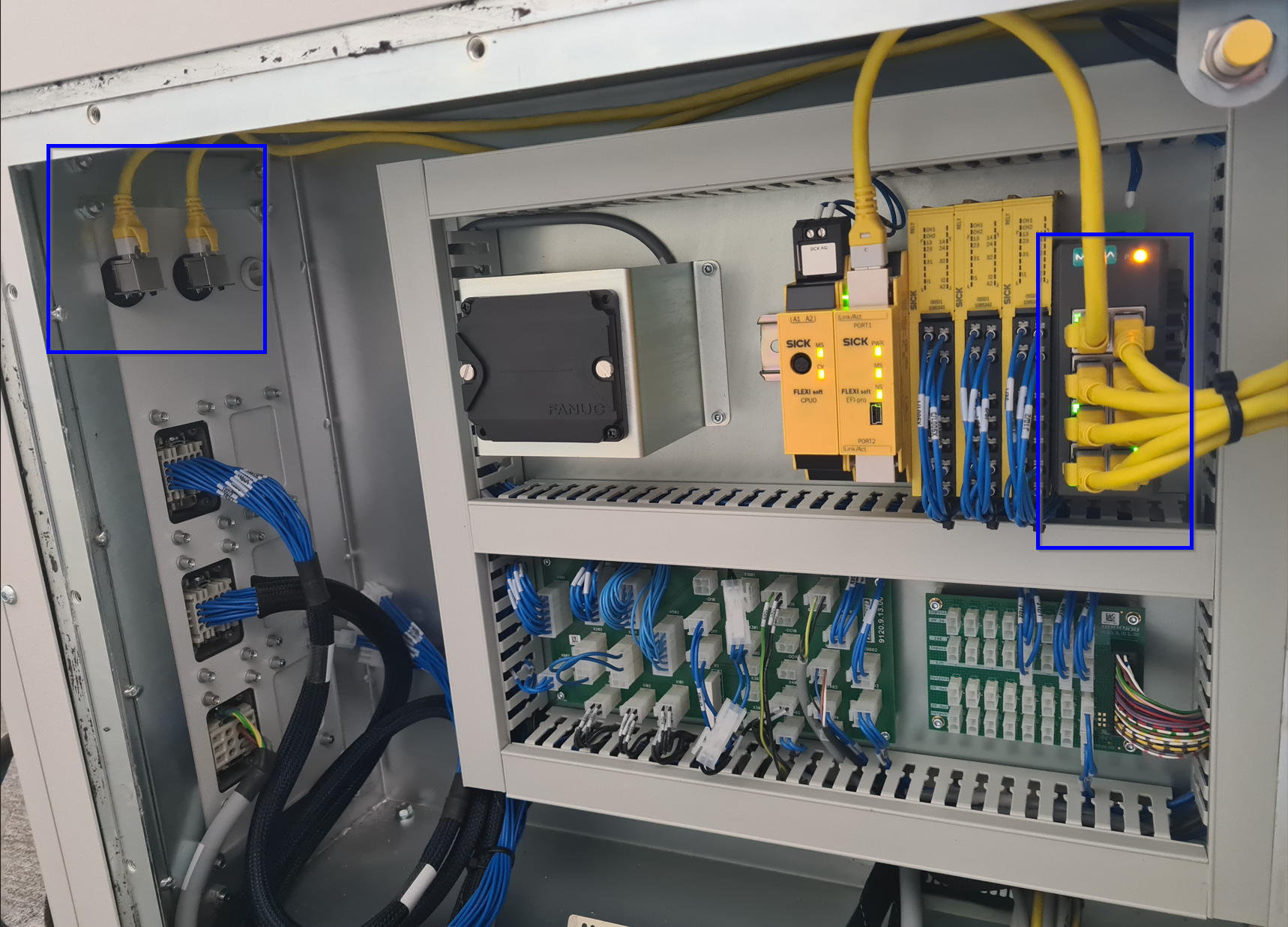
2.4.1. Staplertisch
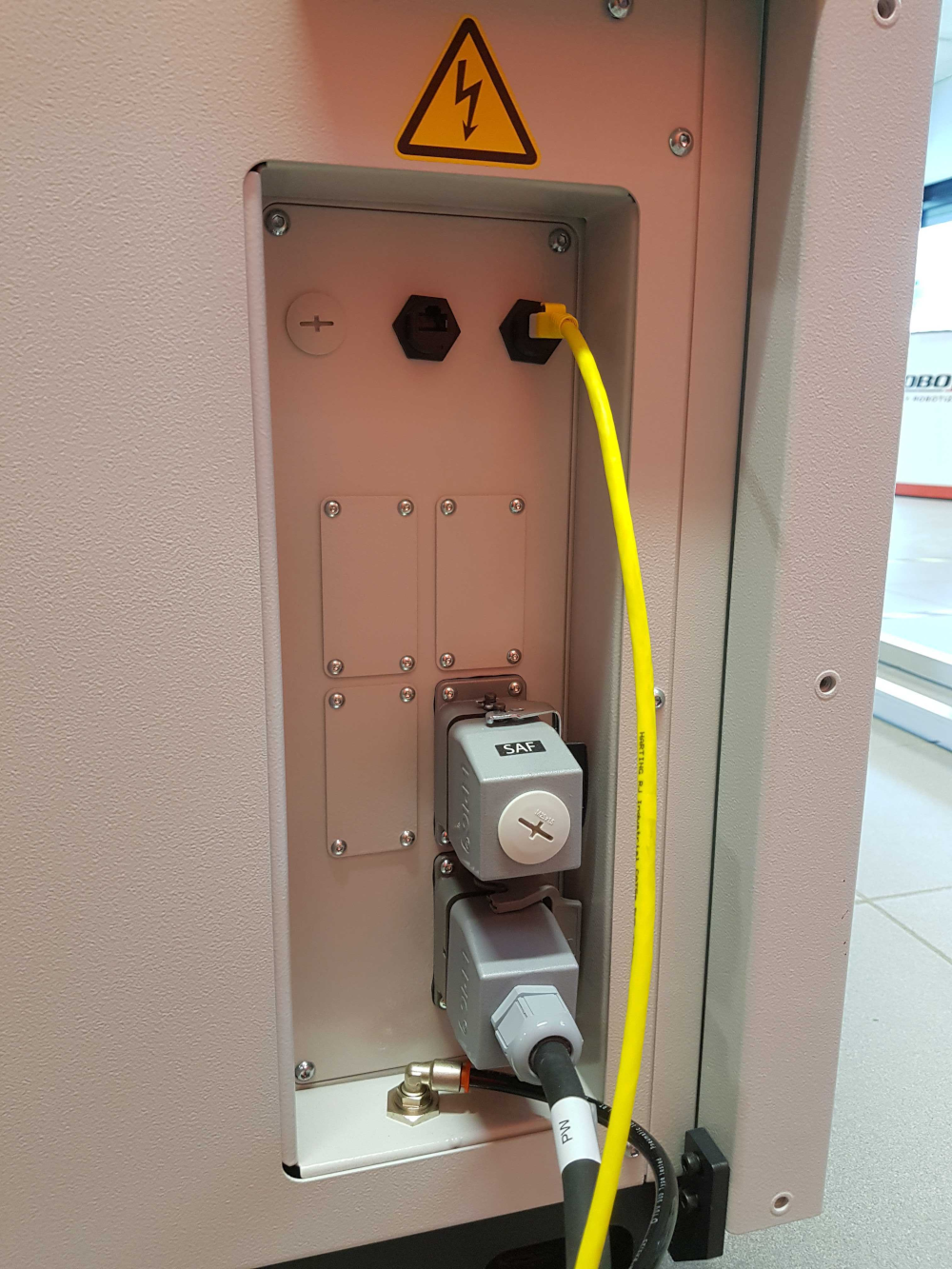
Überprüfen Sie die Ethernet-Anschlüsse an der Außenseite des Staplertisches.Je nach Einrichtung kann die Anzahl der Anschlüsse variieren.
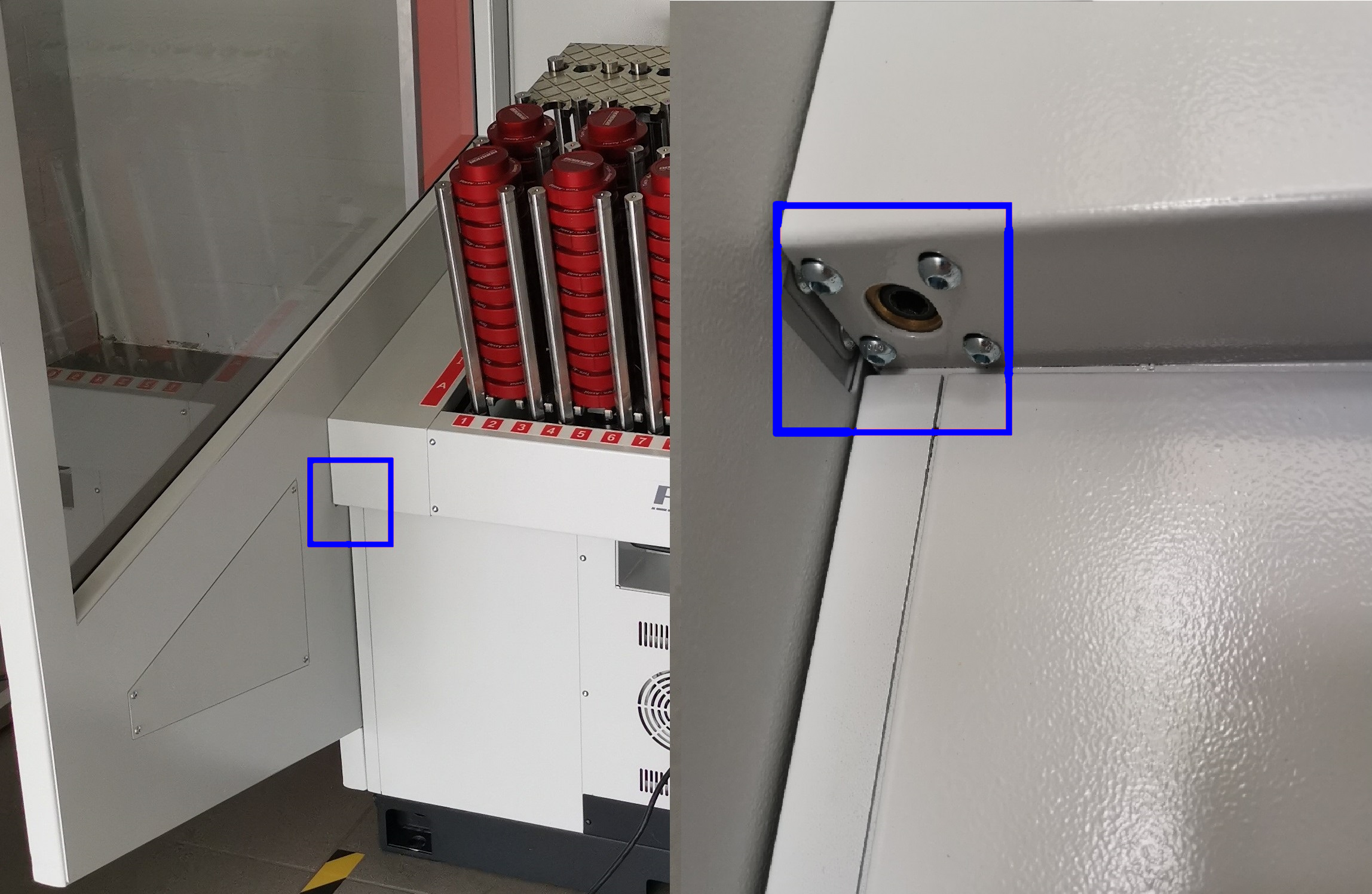
Öffnen Sie die Tür des Staplertisches und überprüfen Sie die Ethernet-Verbindungen im Inneren. Verwenden Sie zum Entriegeln der Tür einen 8-mm-Inbusschlüssel.
Prüfen Sie, ob die Kontrollleuchten leuchten oder blinken.
2.4.2. Geräteschnittstelle SPS
Überprüfen Sie das Ethernet-Kabel an der Geräteschnittstelle.Die Geräteschnittstelle ist eine SPS, die zur Kommunikation mit der Maschine verwendet wird.Sie ist normalerweise in die Maschine integriert oder befindet sich in einem separaten Schaltschrank in der Nähe der Maschine.

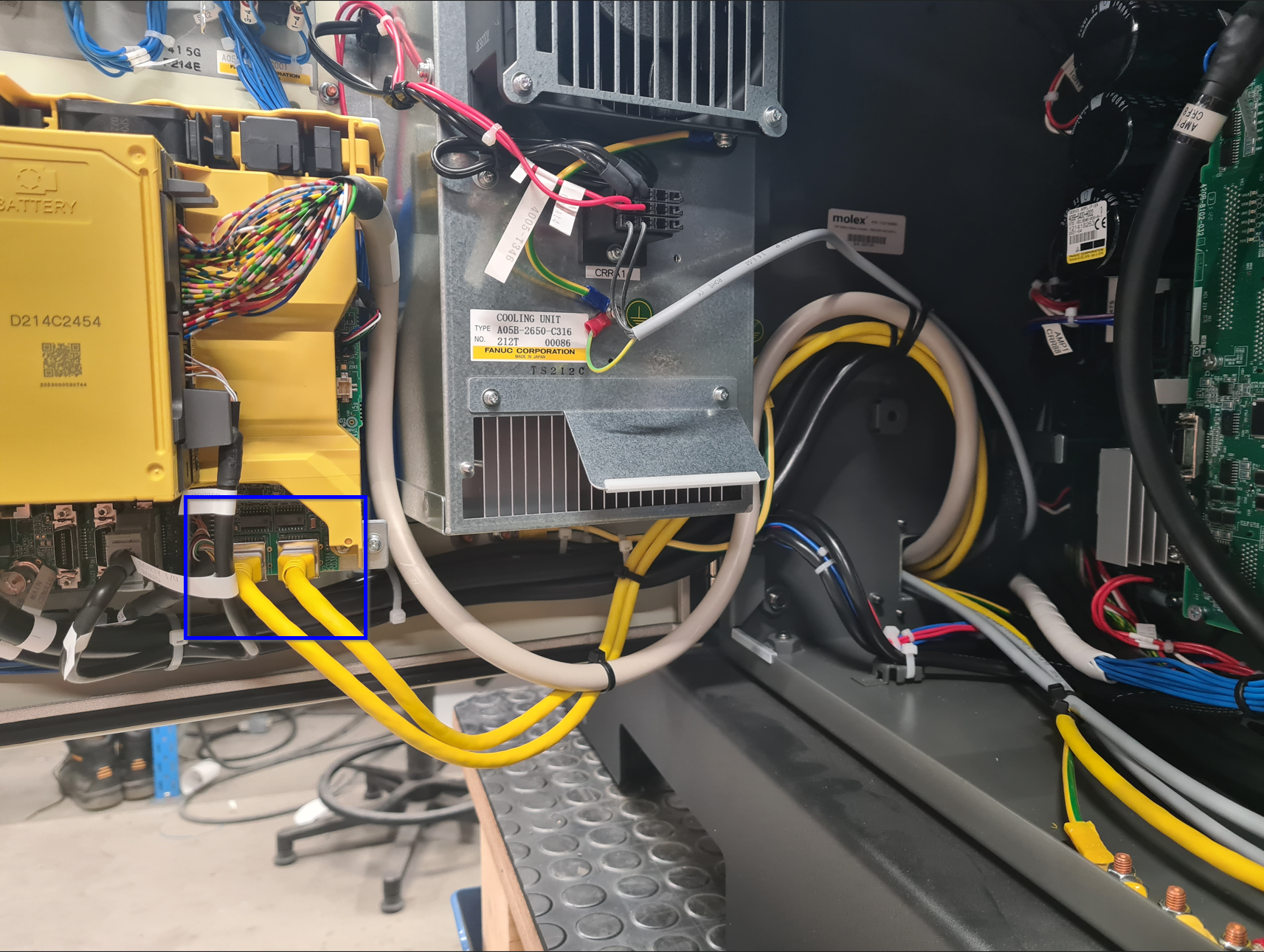
2.4.3. Roboter
Öffnen Sie die Tür der Robotersteuerung und überprüfen Sie alle Ethernet-Anschlüsse im Inneren.Vergewissern Sie sich, dass das Ethernet-Kabel mit dem richtigen Anschluss verbunden ist.
Je nach Einrichtung kann sich in der Geräteschnittstelle ein Ethernet-Switch befinden.
2.4.4. IPC
Der IPC kann durch Entfernen der sechs Sechskantschrauben an den Seiten des Bildschirms demontiert werden.Überprüfen Sie, ob das Ethernet-Kabel an den richtigen Ethernet-Anschluss angeschlossen ist.Bitte beachten Sie, dass Sie das Ethernetkabel wieder in den IPC-Anschluss stecken müssen, in dem es ursprünglich installiert war.Die IPC-Ports sind getrennte NICs, sie sind nicht geschaltet!

2.4.5. Verwenden Sie einen Kabeltester
Verwenden Sie einen LAN-Kabeltester, um alle Ethernet-Kabel zu überprüfen.Anweisungen zur Verwendung des Kabeltesters finden Sie im Handbuch des Geräts.Mit diesem Test wird geprüft, ob die Ethernet-Kabel selbst richtig verkabelt sind.
2.4.6. Kabel austauschen
Ersetzen Sie alle Kabel, die einen der oben genannten Tests nicht bestehen.
Wenn die obigen Tests erfolgreich waren, aber immer noch intermittierende Probleme mit der Verbindung auftreten, versuchen Sie, das Kabel durch ein provisorisches Kabel zu ersetzen, das garantiert richtig funktioniert.Dieses provisorische Kabel kann zu Testzwecken um das Gerät herum verlegt werden.Wenn die Verbindungsprobleme immer noch auftreten, liegt es mit Sicherheit nicht am Kabel.
3. So erhalten Sie weitere Hilfe
Zögern Sie nicht, uns zu kontaktieren, wenn Sie zusätzliche Unterstützung benötigen, die über die in der RoboJob Service Knowledge Base bereitgestellten Dokumente hinausgeht.
Sie können die RoboJob-Serviceabteilung auf folgende Weise kontaktieren:
-
Help Center: service.robojob.eu
-
E-Mail: service@robojob.eu
-
Telefon: +49 7134 9199 543
Wir bitten Sie, uns folgende Informationen zur Verfügung zu stellen:
-
Seriennummer xx-xx-xxx
-
Beschreibung des mangelhaften oder defekten Teils
-
Genauer Fehlercode oder Nachricht
-
Was hat der Roboter getan
-
Was sollte der Roboter tun
-
Bilder oder Videos
Sie können diese Informationen per E-Mail an uns senden.Um große Dateien zu senden, können Sie einen Dateiübertragungsdienst wie WeTransfer verwenden: robojob.wetransfer.com.
Eine automatische Bestätigung wird nach Erhalt Ihrer Mail gesendet.