Manuell auf Startposition - Turn-Assist
|
Der Robot befindet sich an einer unbekannten Position und kann sich nicht automatisch auf Home bewegen.Mit diesem Verfahren kann der Robot auf die Startposition (Home) gebracht werden. |
- 1. Verwenden Sie folgende Werkzeuge
-
2. Vorgehensweise
- 2.1. Setzen Sie den Roboter in den manuellen Modus
- 2.2. Manuelle Bewegung durch Stoppen der Robotersoftware ermöglichen
- 2.3. Alle Fehler zurücksetzen
- 2.4. Manuelles Bewegen des Roboters
- 2.5. Schicken Sie den Roboter manuell in die Ausgangsposition
- 2.6. Zurückschalten in den automatischen Modus
- 2.7. Starten Sie die Robotersoftware neu
- 3. So erhalten Sie weitere Hilfe
1. Verwenden Sie folgende Werkzeuge
|
|
|

2. Vorgehensweise
2.1. Setzen Sie den Roboter in den manuellen Modus
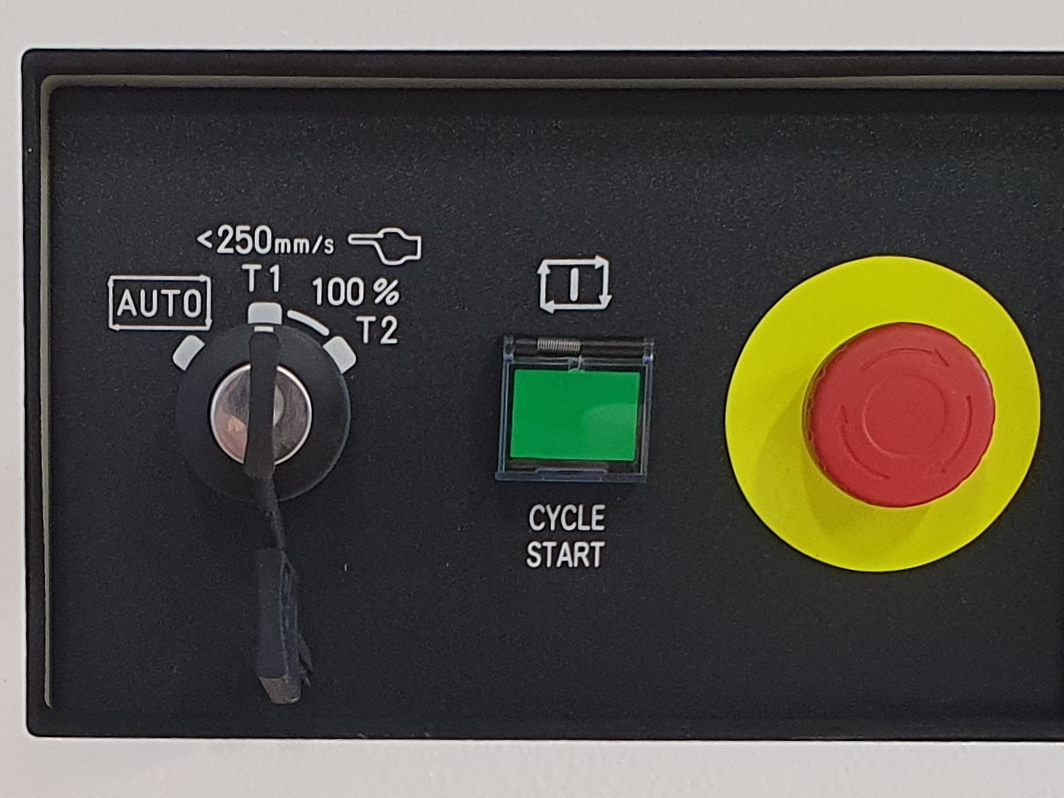
Stellen Sie den Dreistellungsschalter am Robot Controller auf T1.
Stellen Sie den Zweipositionsschalter am Teach Pendant auf On.

2.2. Manuelle Bewegung durch Stoppen der Robotersoftware ermöglichen
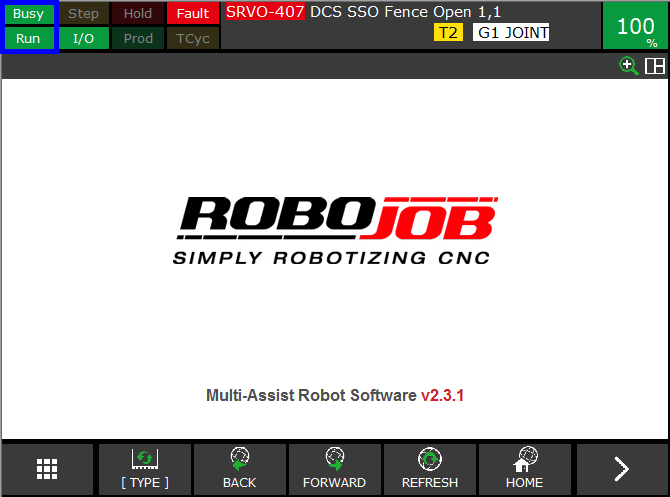
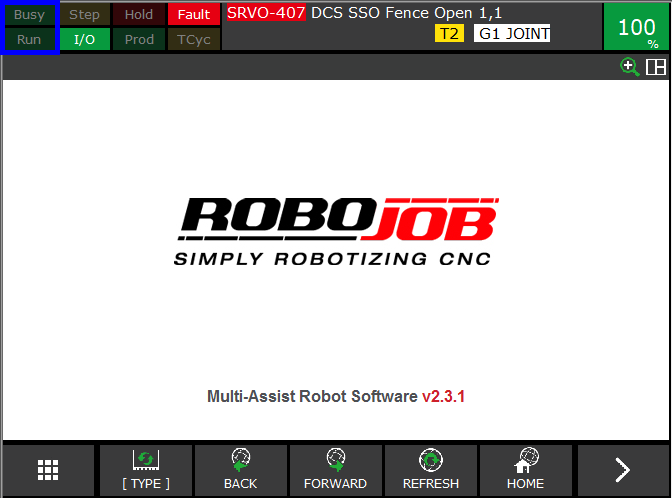
Beachten Sie die Anzeigen 'Busy' und 'Run' oben links auf dem Bildschirm des Teach Pendant.In diesem Moment sollten sie grün sein, was anzeigt, dass die Robotersoftware läuft.
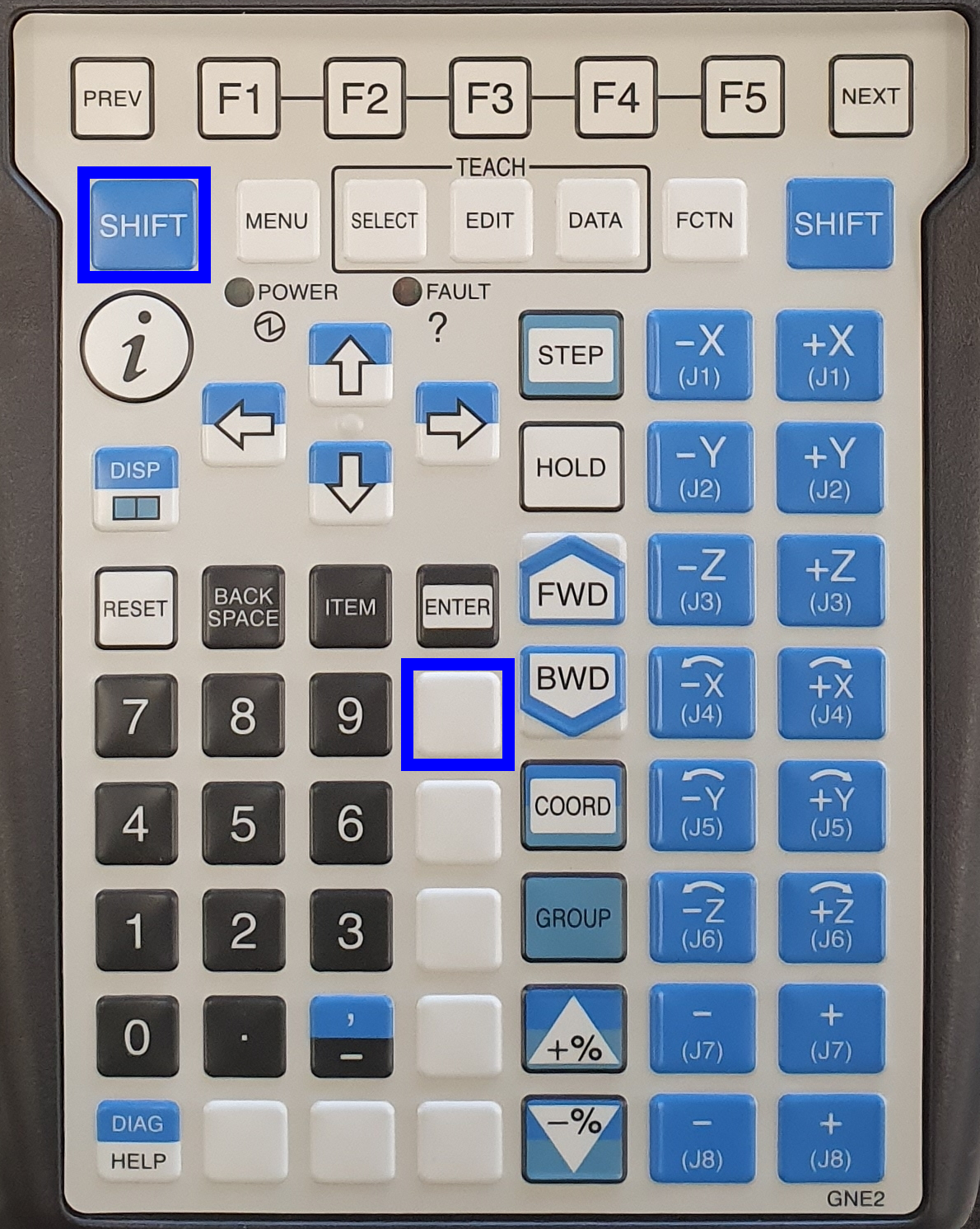
Drücken Sie SHIFT + die Leertaste (Tool 1) unter ENTER, um die Robotersoftware zu stoppen.
Die Anzeigen 'Busy' und 'Run' auf der Oberseite des Teach Pendant sollten inaktiv werden.
2.3. Alle Fehler zurücksetzen
Um den Roboter auf sichere Weise zu bewegen, muss sich ein Totmannschalter auf der Rückseite des Teach Pendant in der sicheren Mittelstellung befinden.
Beide Totmannschalter haben 3 Stellungen:
-
Nicht gedrückt
-
Sichere Mittelstellung
-
Vollständig gepresst
Versuchen Sie, ob Sie die drei Positionen fühlen können.Um den Fehler zurücksetzen und den Roboter bewegen zu können, muss sich nur einer der beiden Totmannschalter in der sicheren Mittelstellung befinden.Also drängen Sie nicht zu hart oder zu weich!
Drücken Sie die SHIFT-Taste zusammen mit der RESET-Taste, um alle Fehler zu löschen.
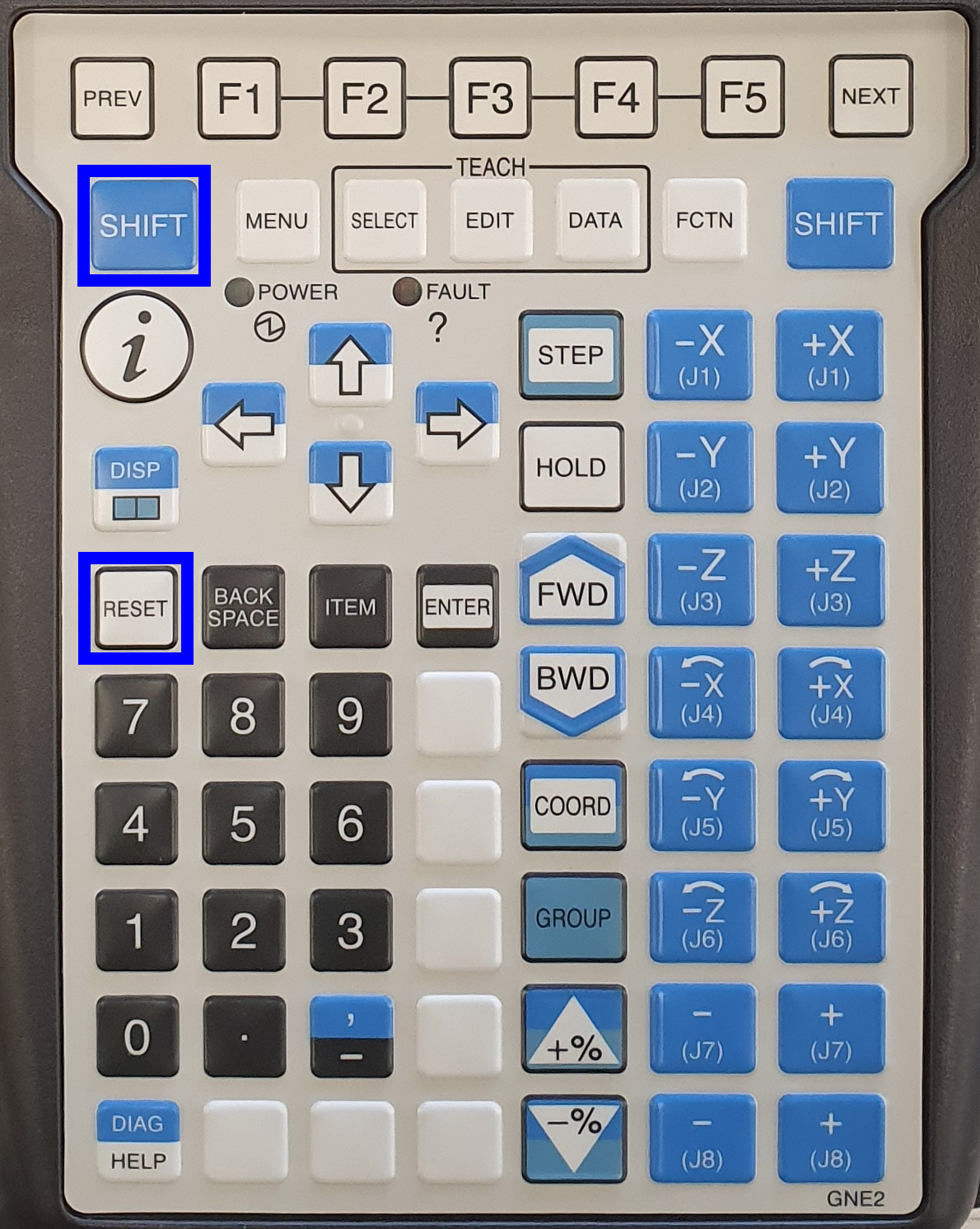
Die Fehleranzeige oben auf dem Teach Pendant sollte inaktiv werden.
2.4. Manuelles Bewegen des Roboters
|
Stellen Sie sicher, dass der Roboter während der Bewegung nichts trifft.Achten Sie auf andere Personen, umgebende Maschinen, andere Gegenstände und den Roboter selbst.Achten Sie darauf, dass die Auskleidungskabel um den Roboter herum nicht beschädigt werden. |
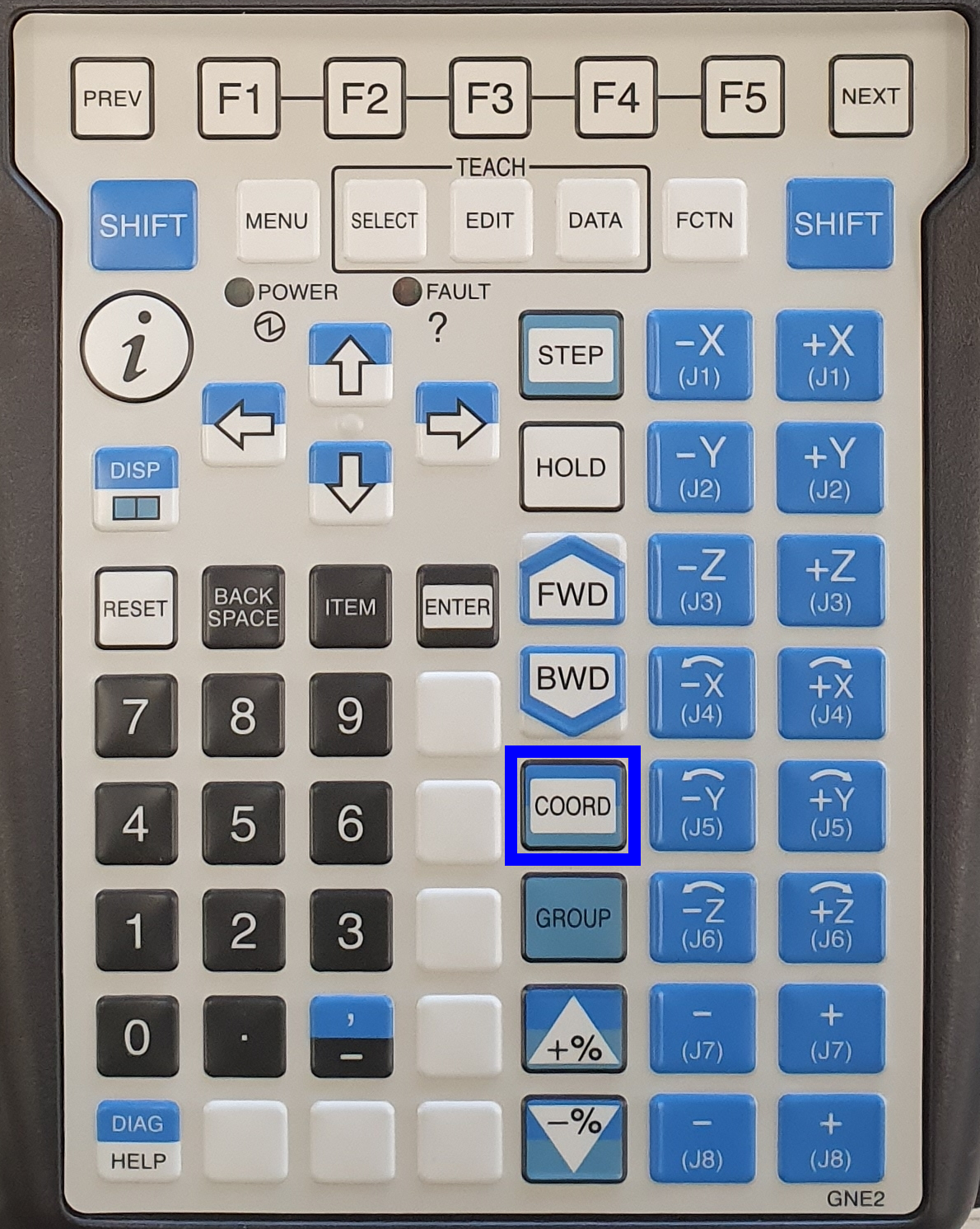
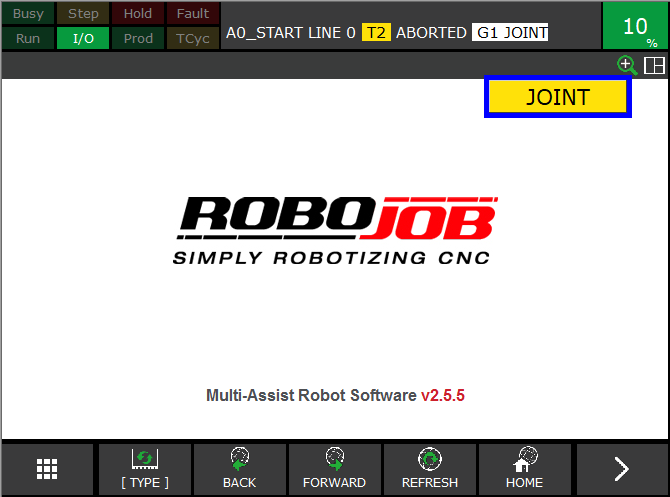
Drücken Sie COORD, um die Art der Bewegung zu ändern.Drücken Sie so lange, bis JOINT ausgewählt ist.Der Bewegungsmodus JOINT ist am einfachsten zu handhaben.Sie können die Gelenke einzeln verschieben.
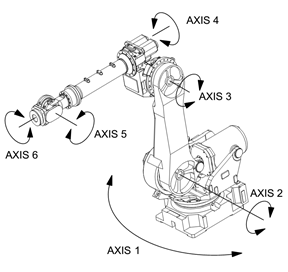
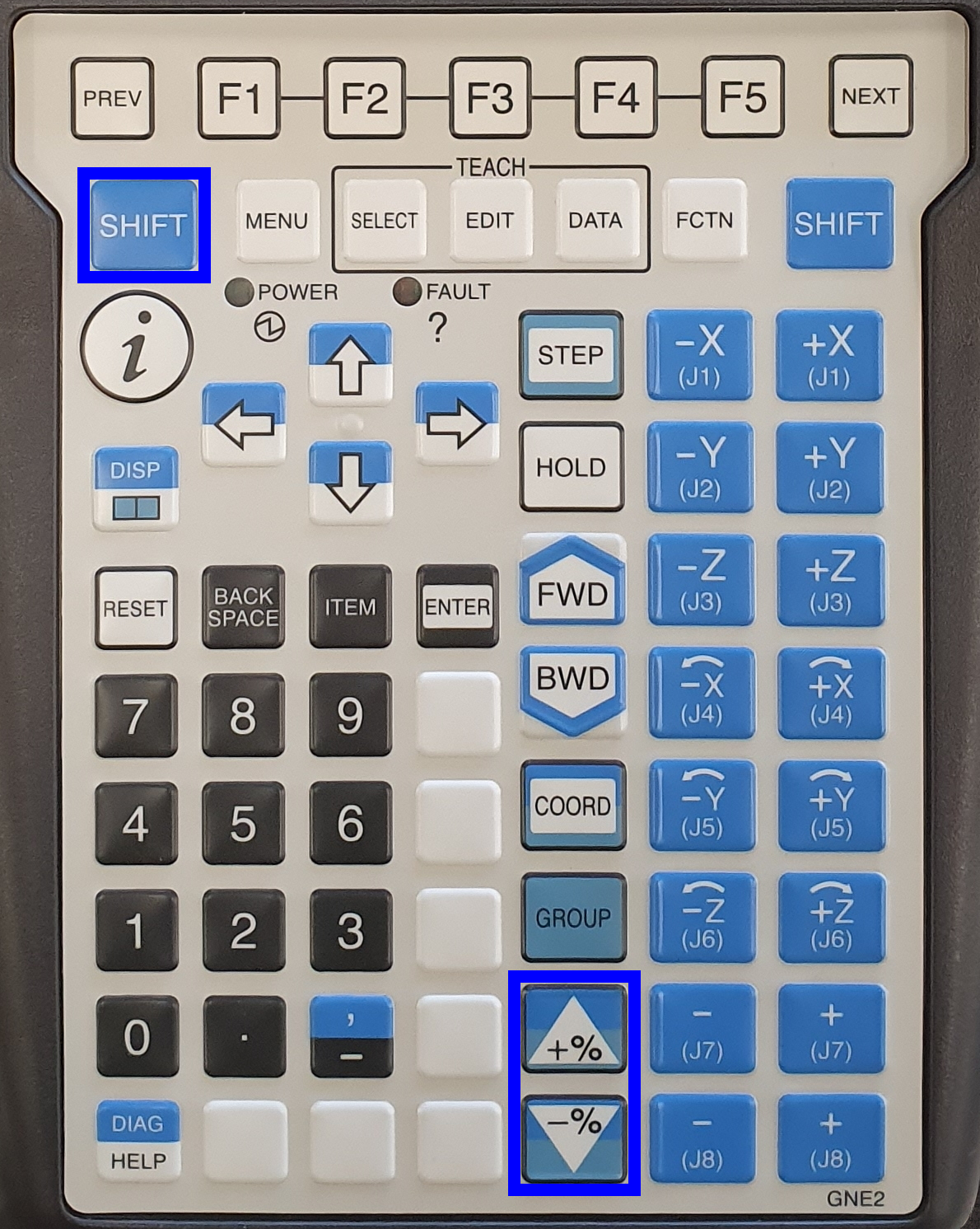
Drücken Sie SHIFT + ±J1-8, um den Roboter zu bewegen.
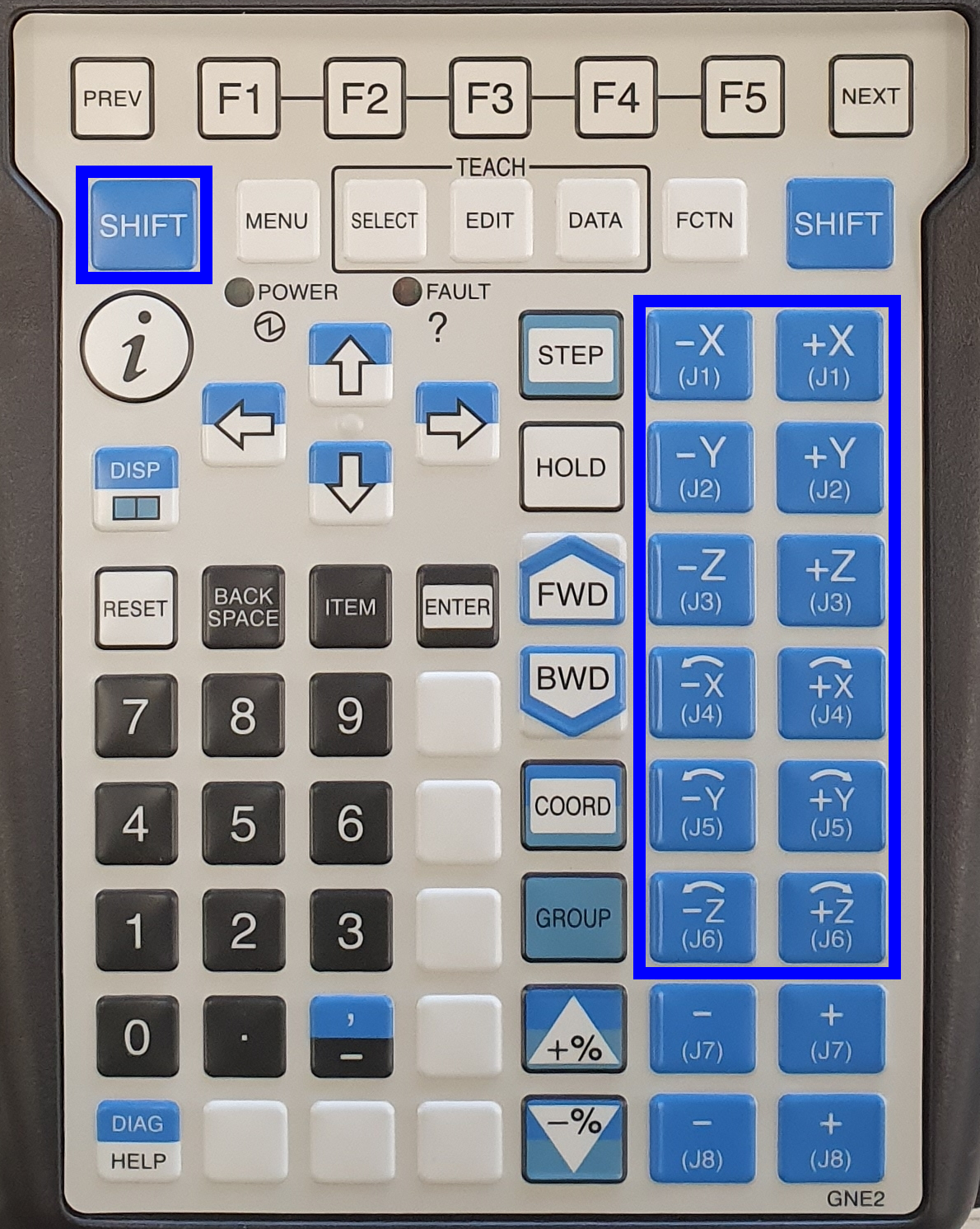
Drücken Sie SHIFT + +% oder -%, um die Geschwindigkeit anzupassen.
2.5. Schicken Sie den Roboter manuell in die Ausgangsposition
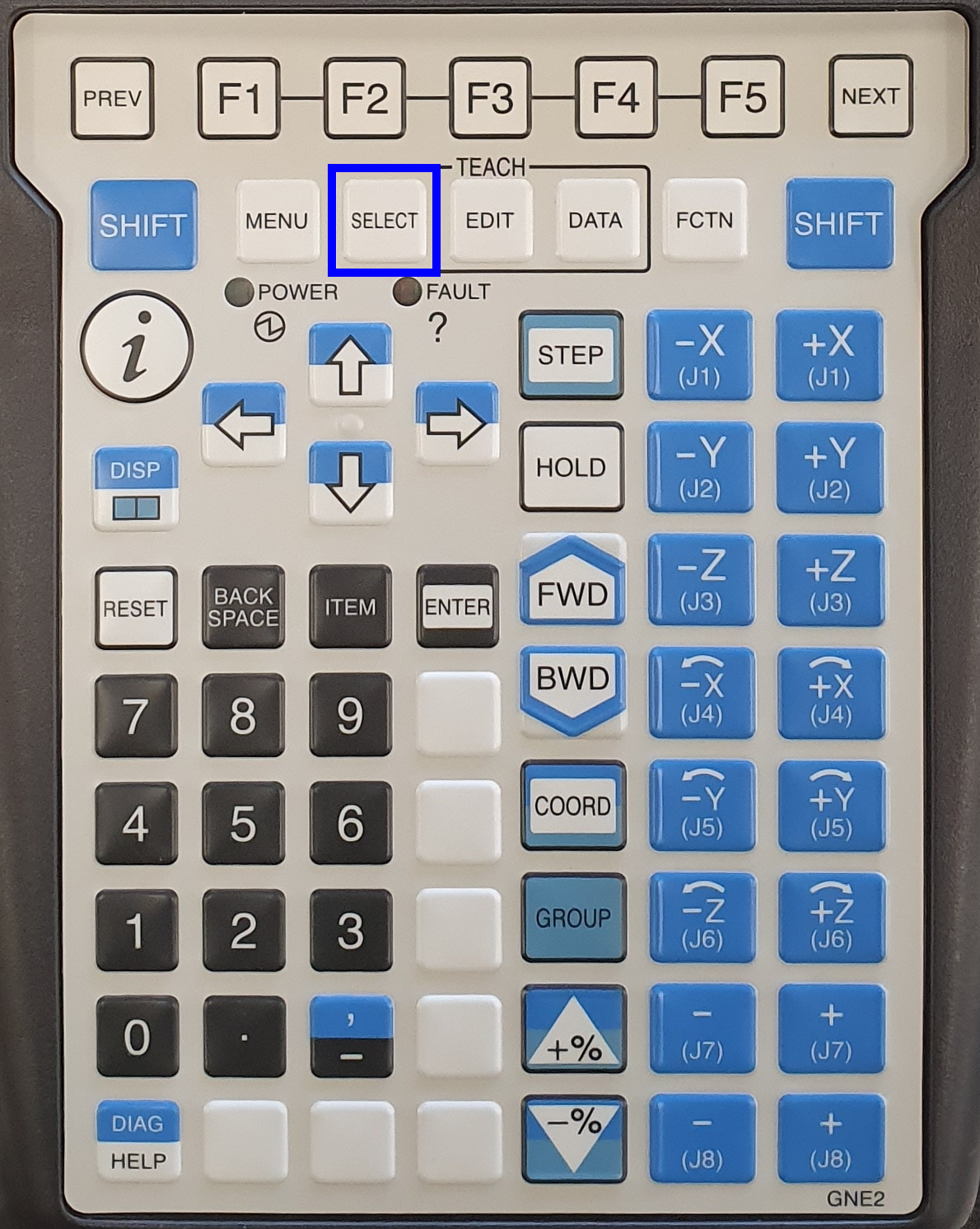
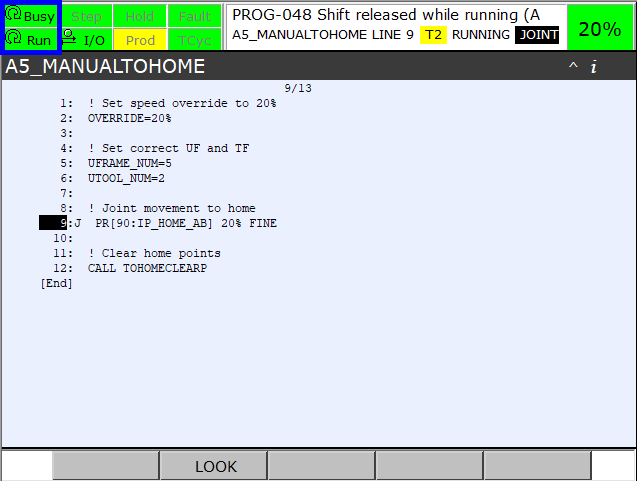
Mit SELECT wird die Programm-Auswahl geöffnet. Mit UP und DOWN kann A5_MANUALTOHOME ausgewählt werden.Mit SHIFT kann schneller gescrollt (gerollt) werden.
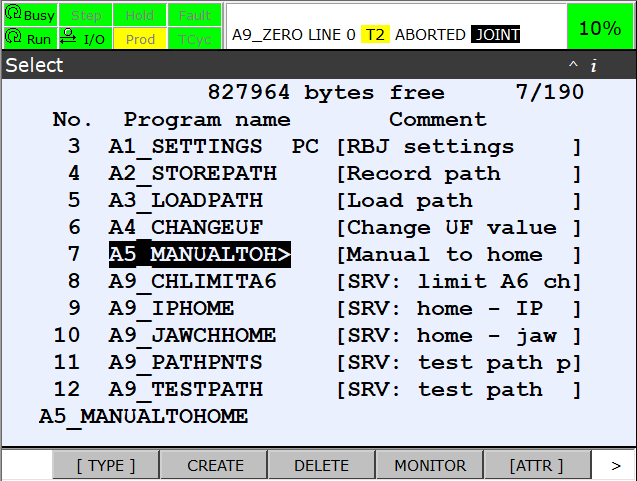
Wenn A5_MANUALTOHOME ausgewählt wurde, kann das Programm mit ENTER geöffnet werden.
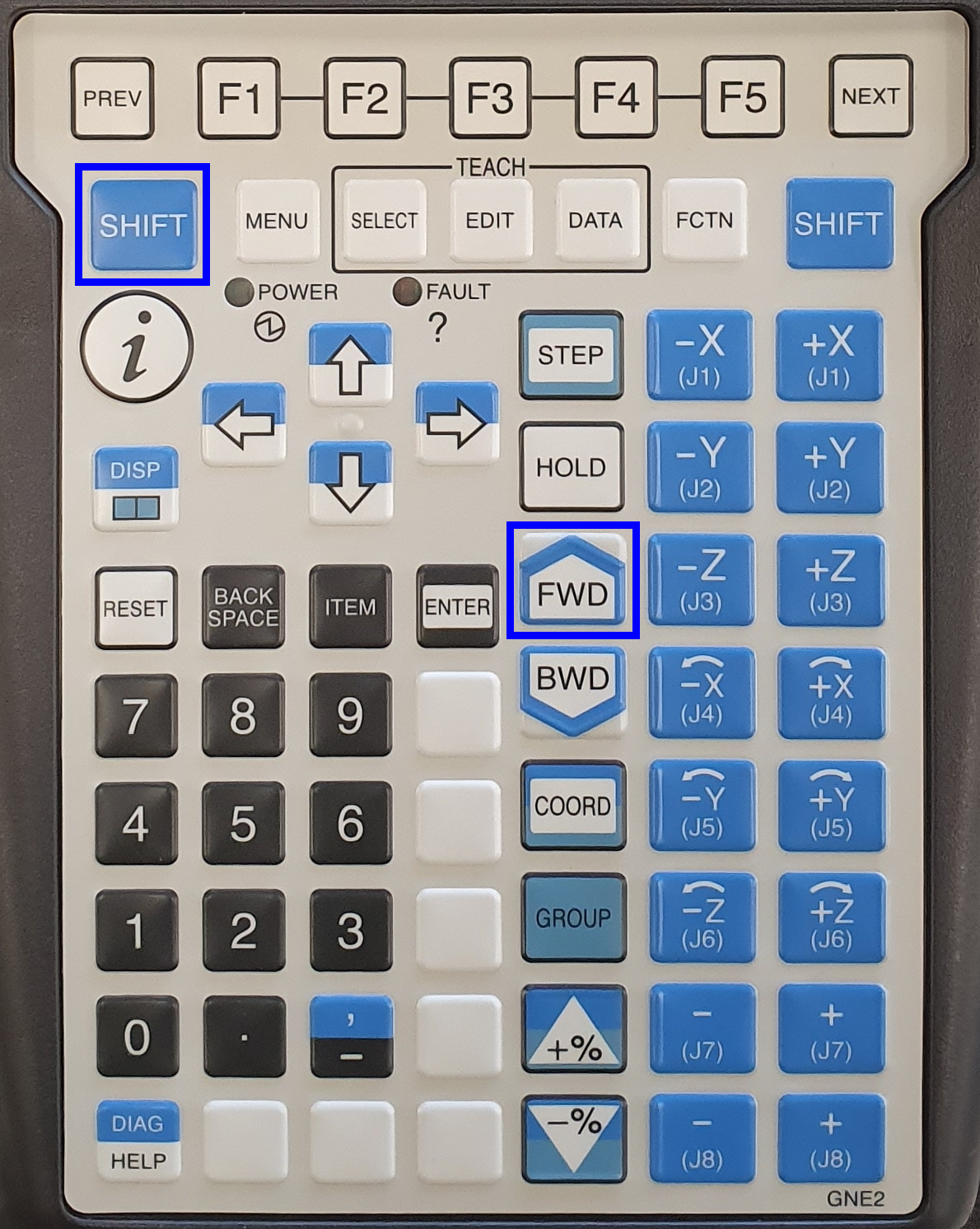
Das Programm wird durch Betätigen von SHIFT + FWD ausgeführt.Der Robot wird dann genau zur Startposition (Home) bewegt.
Bei Bedarf dann die Taste SHIFT oder den Totmann-Schalter loslassen, um die Bewegung zu stoppen.
|
ACHTUNG! Der Robot darf beim Bewegen nichts berühren.Immer auf umstehende Personen, Maschinen im Bereich, andere Objekte und den Robot selbst achten.Die aus dem Robot herausgeführten Kabel dürfen nicht beschädigt werden. |
Die Anzeigen 'Busy' und 'Run' leuchten während der Bewegung grün.Die Taste SHIFT und einen der Totmann-Schalter gedrückt halten, bis der Robot die Startposition (Home) erreicht hat.
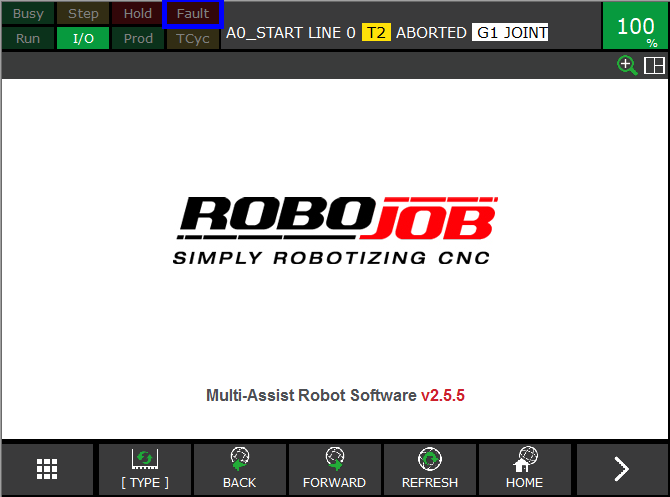
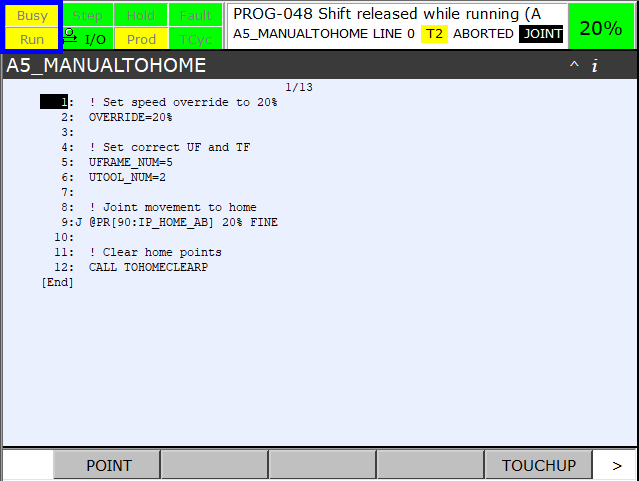
Wenn der Robot die Startposition (Home) erreicht hat, schalten die Anzeigen 'Busy' und 'Run' wieder auf Gelb um, und die erste Zeile des Programms wird ausgewählt.
2.6. Zurückschalten in den automatischen Modus
Stellen Sie den Dreistellungsschalter am Robot Controller auf AUTO.

Stellen Sie den Zwei-Positionen-Schalter am Teach Pendant auf Off.

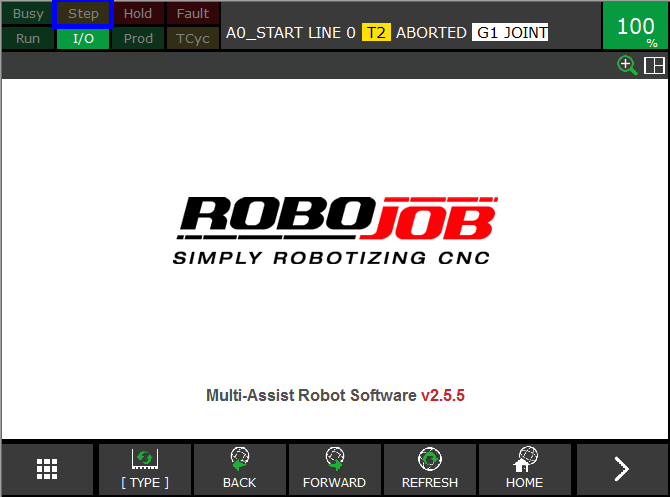
Stellen Sie sicher, dass der Step-Modus inaktiv ist. Verwenden Sie die STEP-Taste, um den Step-Modus umzuschalten.
2.7. Starten Sie die Robotersoftware neu
Um die Kommunikation mit der IPC wiederherzustellen, muss die Robotersoftware neu gestartet werden.Der einfachste Weg, dies zu erreichen, ist ein Neustart der Robotersteuerung und des IPC durch Aus/Ein Schalten der Stromversorgung.
3. So erhalten Sie weitere Hilfe
Zögern Sie nicht, uns zu kontaktieren, wenn Sie zusätzliche Unterstützung benötigen, die über die in der RoboJob Service Knowledge Base bereitgestellten Dokumente hinausgeht.
Sie können die RoboJob-Serviceabteilung auf folgende Weise kontaktieren:
-
Help Center: service.robojob.eu
-
E-Mail: service@robojob.eu
-
Telefon: +49 7134 9199 543
Wir bitten Sie, uns folgende Informationen zur Verfügung zu stellen:
-
Seriennummer xx-xx-xxx
-
Beschreibung des mangelhaften oder defekten Teils
-
Genauer Fehlercode oder Nachricht
-
Was hat der Roboter getan
-
Was sollte der Roboter tun
-
Bilder oder Videos
Sie können diese Informationen per E-Mail an uns senden.Um große Dateien zu senden, können Sie einen Dateiübertragungsdienst wie WeTransfer verwenden: robojob.wetransfer.com.
Eine automatische Bestätigung wird nach Erhalt Ihrer Mail gesendet.