SRVO-038 Puls-Fehler (Pulse mismatch)
|
In diesem Dokument wird beschrieben, wie Sie einen SRVO-038 Pulse mismatch alarm beheben.Der Alarm wird ausgelöst, wenn sich die beim Einschalten erkannte Geberimpulszahl von der beim Ausschalten gespeicherten unterscheidet. Dies kann passieren, wenn der gespeicherte Impulsgeberwert geändert wird, z. B. durch Laden eines Backups.Der Fehler kann auch ausgelöst werden, wenn der Roboter im ausgeschalteten Zustand bewegt wird. Dies kann passieren, wenn die Haltebremse an einer der Achsen defekt ist. |
1. Verwenden Sie folgende Werkzeuge
|
|

2. Vorgehensweise
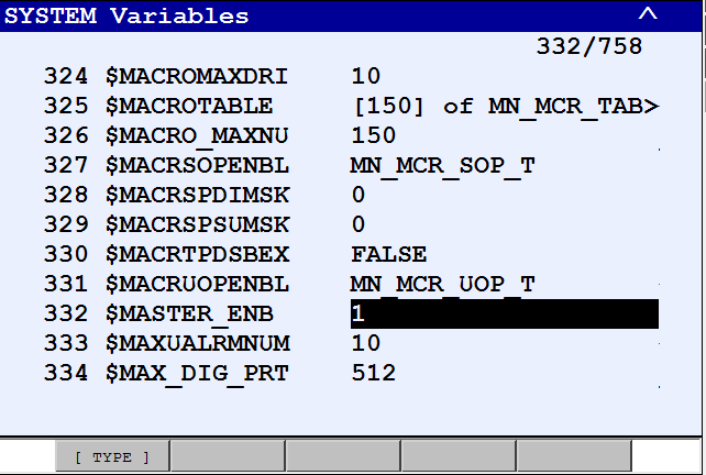
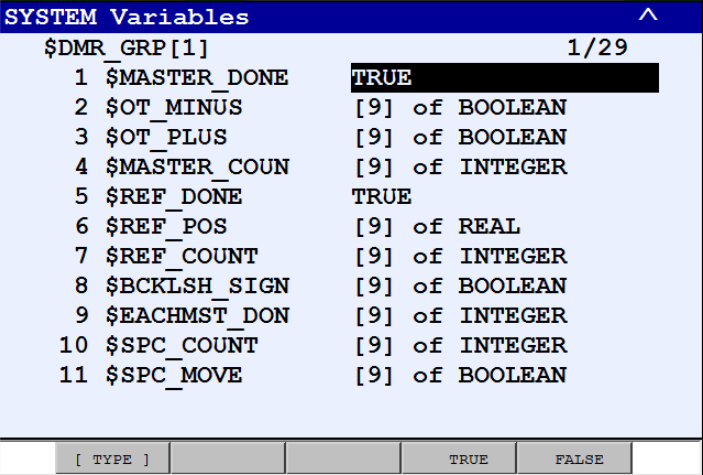
2.3. Setzen Sie den Parameter Master done auf true
MENU > NEXT > SYSTEM > VARIABELE,$DMR_GRP[1].$MASTER_DONE = TRUE
|
Überprüfen, dass die Variable auf TRUE bleibt, ansonsten muss RES_PCA wiederholt werden |
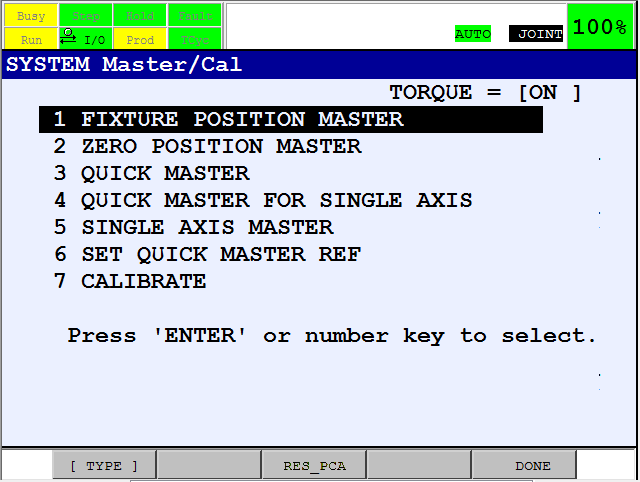
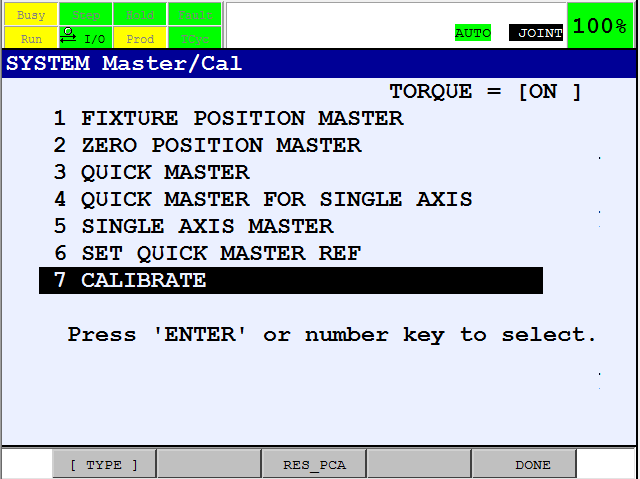
2.4. Kalibrieren Sie den Roboter
MENU > NEXT > SYSTEM > MASTER/CALL, CALIBRATE
|
Mit 'YES' bestätigen, und überprüfen, dass am Display 'ROBOT KALIBRIERT - ROBOT CALIBRATED' angezeigt wird |
3. So erhalten Sie weitere Hilfe
Zögern Sie nicht, uns zu kontaktieren, wenn Sie zusätzliche Unterstützung benötigen, die über die in der RoboJob Service Knowledge Base bereitgestellten Dokumente hinausgeht.
Sie können die RoboJob-Serviceabteilung auf folgende Weise kontaktieren:
-
Help Center: service.robojob.eu
-
E-Mail: service@robojob.eu
-
Telefon: +49 7134 9199 543
Wir bitten Sie, uns folgende Informationen zur Verfügung zu stellen:
-
Seriennummer xx-xx-xxx
-
Beschreibung des mangelhaften oder defekten Teils
-
Genauer Fehlercode oder Nachricht
-
Was hat der Roboter getan
-
Was sollte der Roboter tun
-
Bilder oder Videos
Sie können diese Informationen per E-Mail an uns senden.Um große Dateien zu senden, können Sie einen Dateiübertragungsdienst wie WeTransfer verwenden: robojob.wetransfer.com.
Eine automatische Bestätigung wird nach Erhalt Ihrer Mail gesendet.