Manuell aus Startposition gehen - Multi-Assist
|
Der Roboter befindet sich an einer unbekannten Position und kann sich nicht automatisch auf die Startposition (Home) bewegen.Mit diesem Verfahren kann der Robot auf die Startposition (Home) gebracht werden. |
|
Zuerst versuchen, die normale Home-Funktion im Robotermenü zu verwenden.Dieser Vorgang darf nur in außergewöhnlichen Fällen genutzt werden, wenn der Roboter nicht in der Lage ist, die Startposition (Home) automatisch zu erreichen. |
- 1. Verwenden Sie folgende Werkzeuge
-
2. Vorgehensweise
- 2.1. Setzen Sie den Roboter in den manuellen Modus
- 2.2. Manuelle Bewegung - Manual Movement aktivieren
- 2.3. Alle Fehler zurücksetzen
- 2.4. Setzen Sie die Bewegungsgruppe auf 1
- 2.5. Manuelles Bewegen des Roboters
- 2.6. Mit 'Joint' die Startposition (Home) erreichen
- 2.7. Zurückschalten in den automatischen Modus
- 3. So erhalten Sie weitere Hilfe
1. Verwenden Sie folgende Werkzeuge
|
|
|
|


2. Vorgehensweise
2.1. Setzen Sie den Roboter in den manuellen Modus
Stellen Sie den Dreistellungsschalter am Robot Controller auf T1.
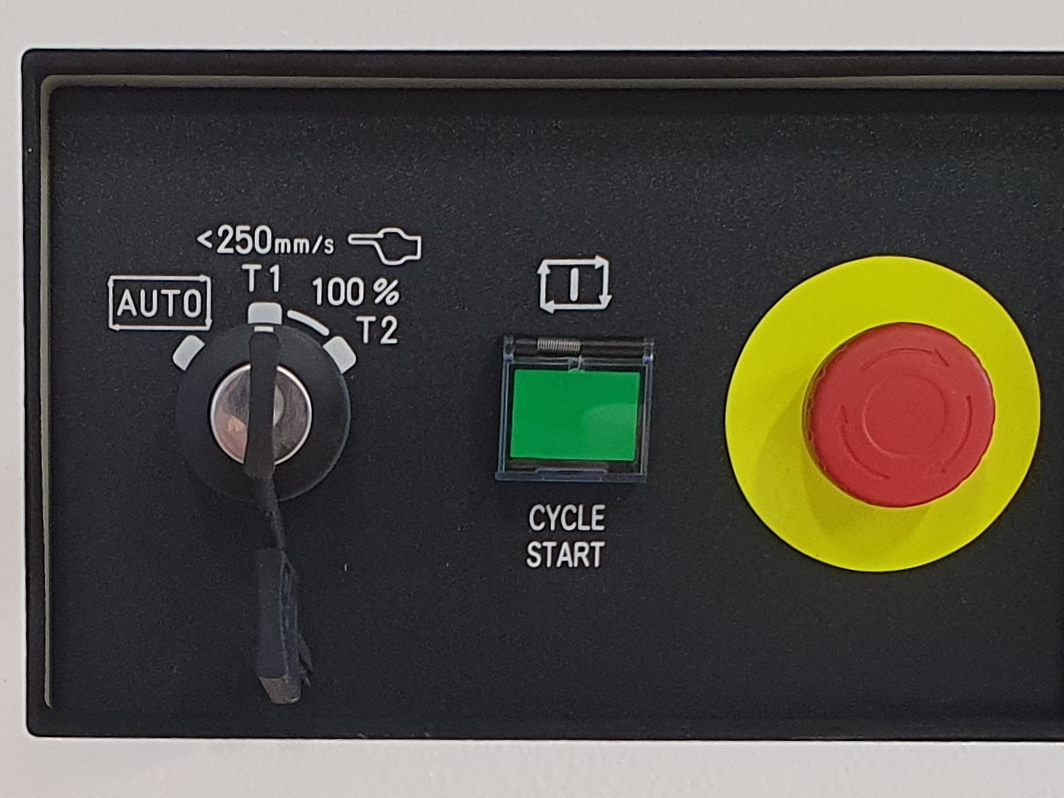
Stellen Sie den Zweipositionsschalter am Teach Pendant auf On.

2.2. Manuelle Bewegung - Manual Movement aktivieren
Am IPC die Software starten und Einstellungen (Settings) aufrufen.
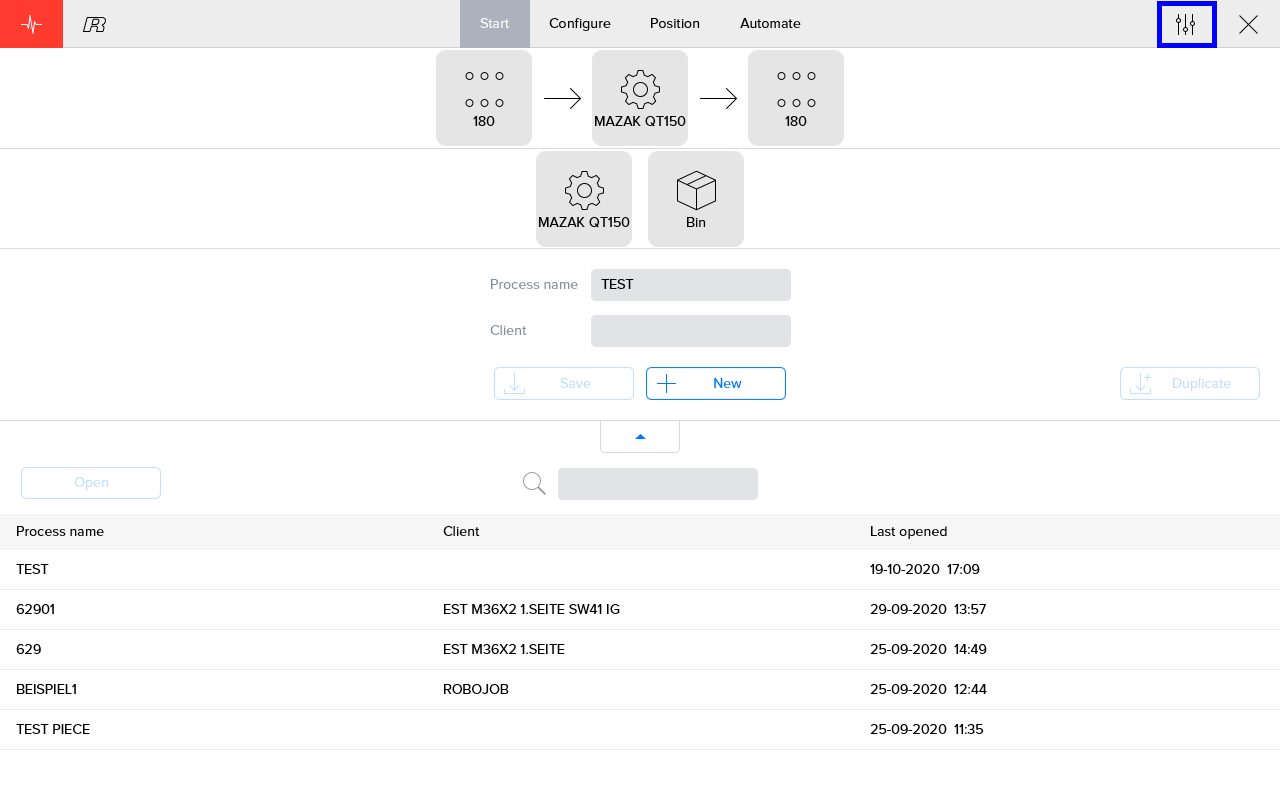
Einstellungen (Settings) des Robots öffnen

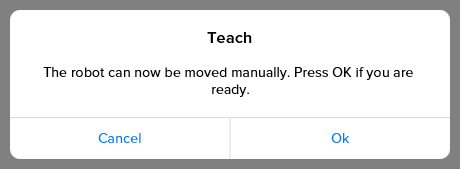
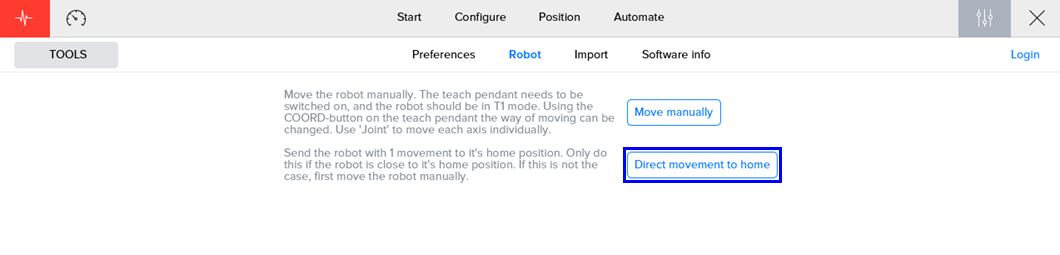
Auf die Taste klicken, um den Robot manuell zu bewegen.
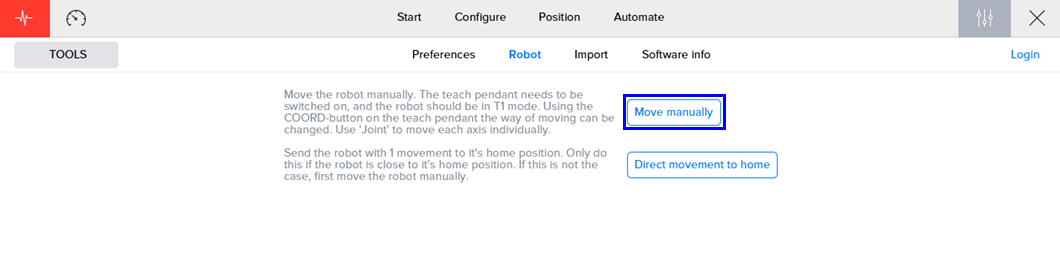
Der Robot kann manuell bewegt werden, solange diese Popup-Fenster geöffnet ist.
2.3. Alle Fehler zurücksetzen
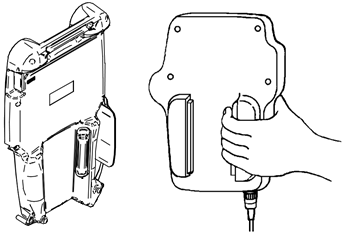
Um den Roboter auf sichere Weise zu bewegen, muss sich ein Totmannschalter auf der Rückseite des Teach Pendant in der sicheren Mittelstellung befinden.
Beide Totmannschalter haben 3 Stellungen:
-
Nicht gedrückt
-
Sichere Mittelstellung
-
Vollständig gepresst
Versuchen Sie, ob Sie die drei Positionen fühlen können.Um den Fehler zurücksetzen und den Roboter bewegen zu können, muss sich nur einer der beiden Totmannschalter in der sicheren Mittelstellung befinden.Also drängen Sie nicht zu hart oder zu weich!
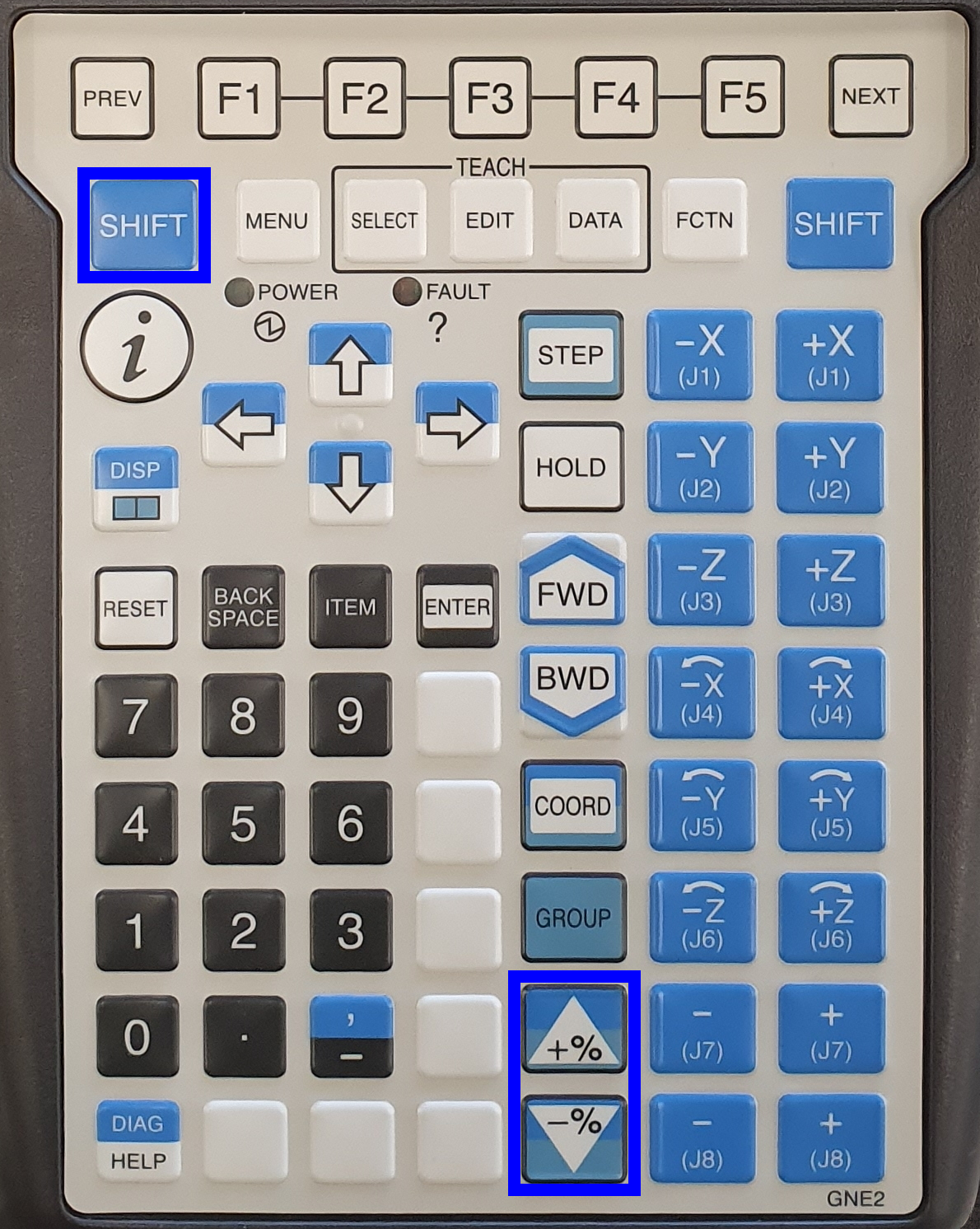
Drücken Sie die SHIFT-Taste zusammen mit der RESET-Taste, um alle Fehler zu löschen.
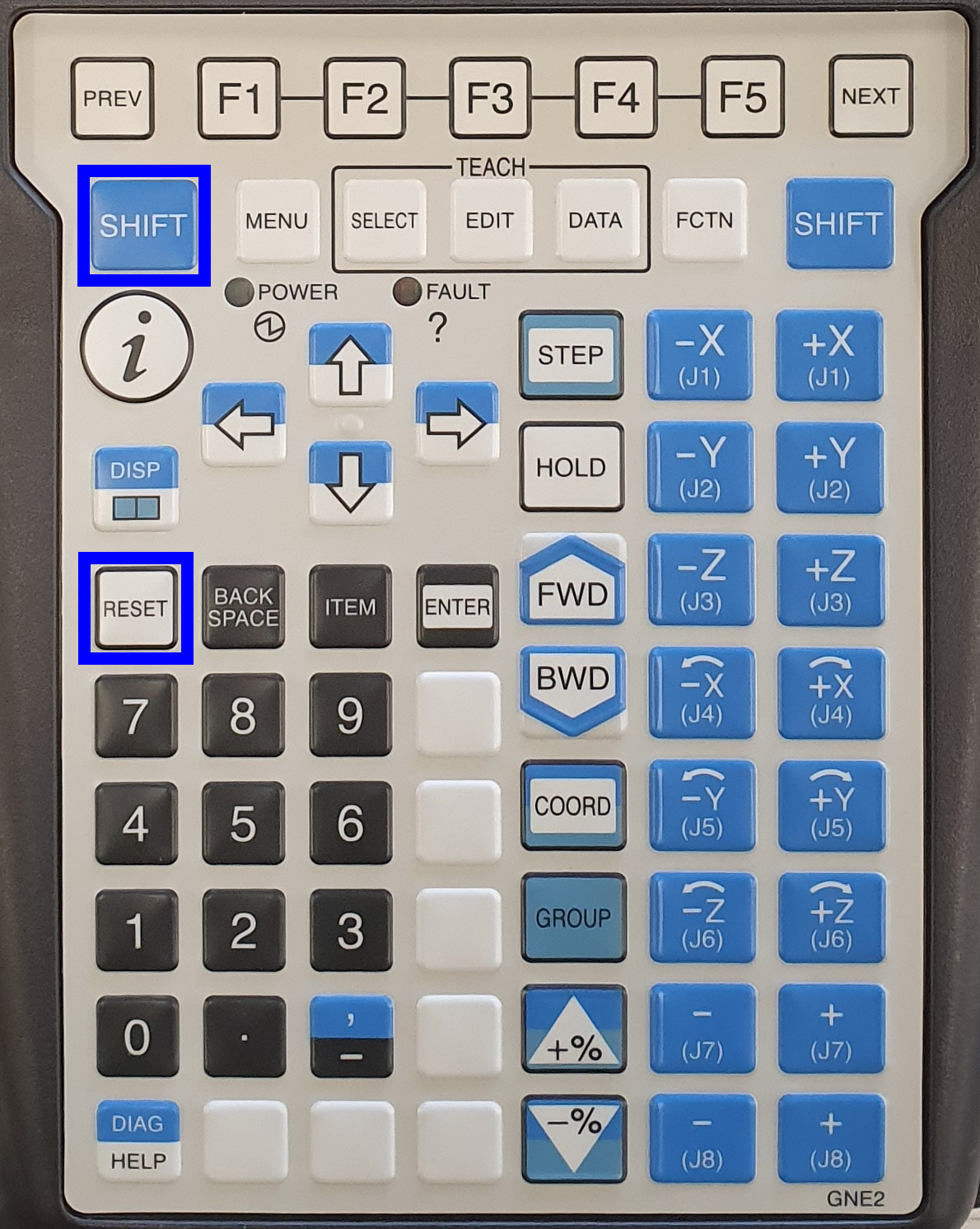
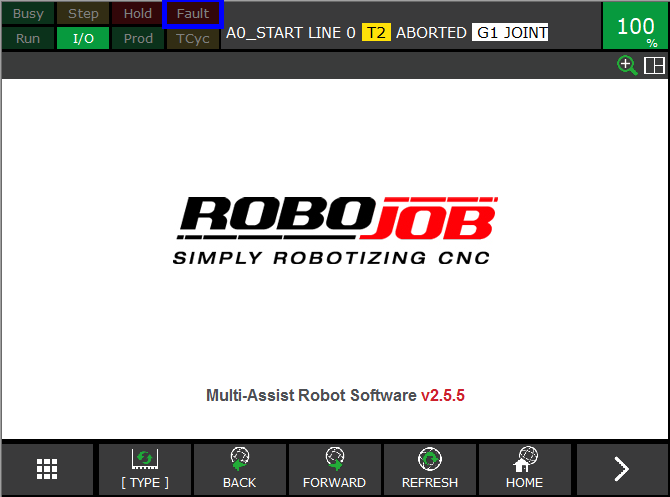
Die Fehleranzeige oben auf dem Teach Pendant sollte inaktiv werden.
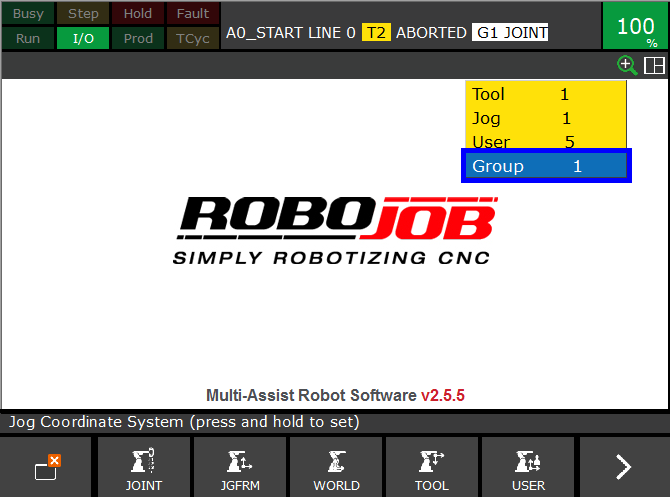
2.4. Setzen Sie die Bewegungsgruppe auf 1
Abhängig von der Version des Roboters muss die 'Group' auf 1 gesetzt werden.Gruppe 1 bewegt den Roboter, Gruppe 2 und 3 bewegen die Tische. Wenn Ihr Roboter mit einem Servogreifer ausgestattet ist, werden die Gruppen 2 und 3 für Greifer A bzw. B verwendet.
Um zu überprüfen, ob die Gruppe auf eins eingestellt ist, drücken Sie SHIFT + RESET (gleichzeitig), es öffnet sich ein kleines Fenster in der oberen rechten Ecke des Bildschirms.Drücken Sie den Abwärtspfeil, bis 'Group' markiert ist.
|
Wenn Sie Gruppe in diesem Menü nicht sehen, drücken Sie die Taste PREV, um das Menü zu verlassen und zum nächsten Schritt zu gehen.Die Tool-, Jog- und User nummern auf Ihrem Bildschirm können anders sein als auf den Bildern unten, das ist in Ordnung. |
Wenn Sie auf einer Gruppe stehen (blau markiert), drücken Sie auf die Taste '1' und drücken Sie ENTER.Das kleine Menü verschwindet.
Jetzt sind Sie in der Lage, den Roboter zu bewegen.
2.5. Manuelles Bewegen des Roboters
|
Stellen Sie sicher, dass der Roboter während der Bewegung nichts trifft.Achten Sie auf andere Personen, umgebende Maschinen, andere Gegenstände und den Roboter selbst.Achten Sie darauf, dass die Auskleidungskabel um den Roboter herum nicht beschädigt werden. |
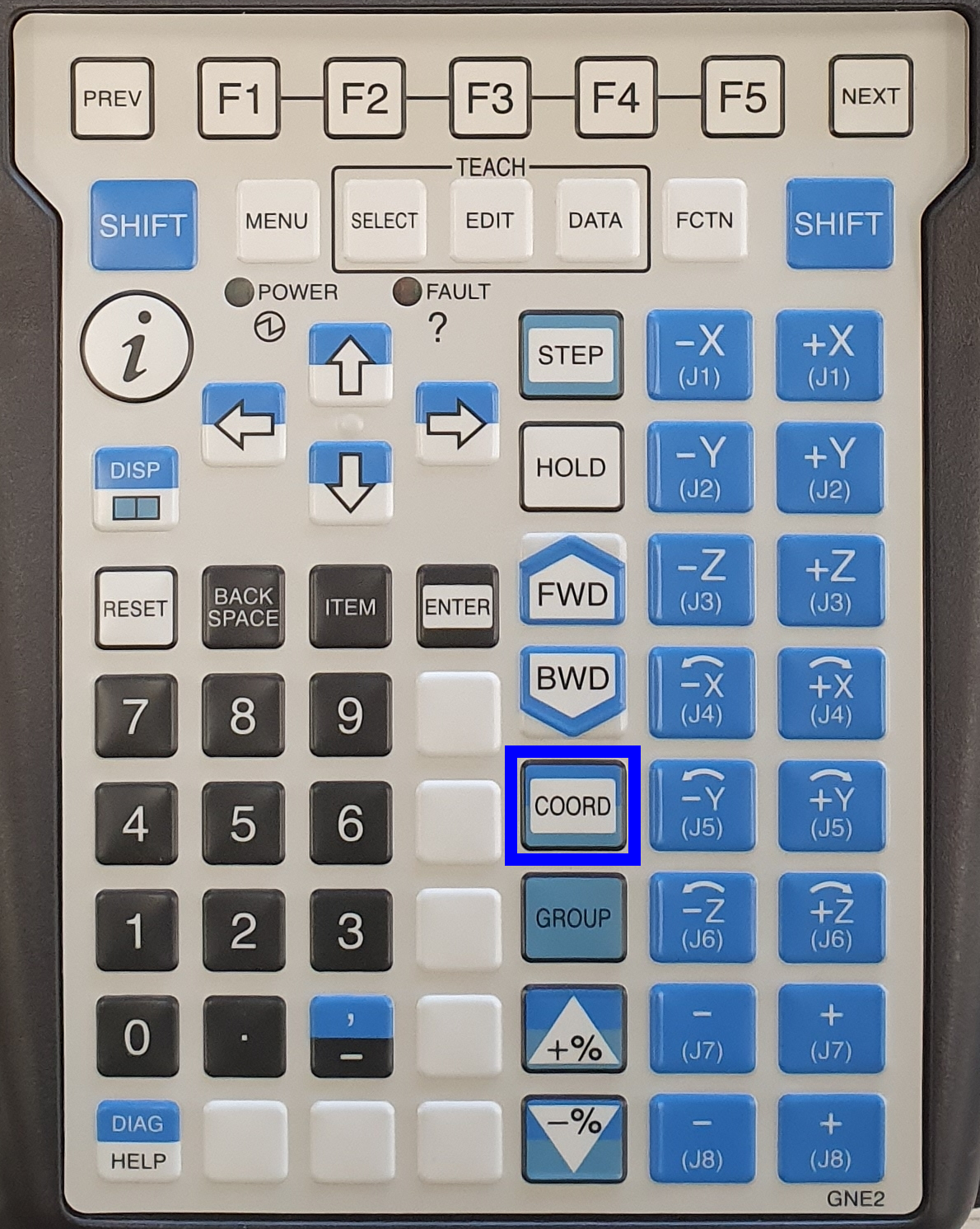
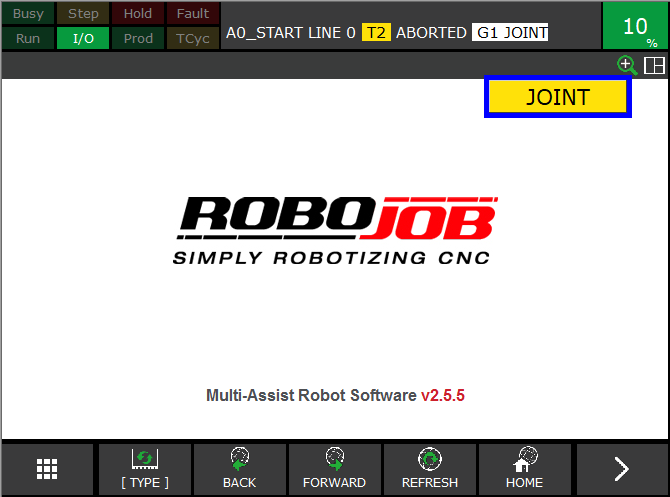
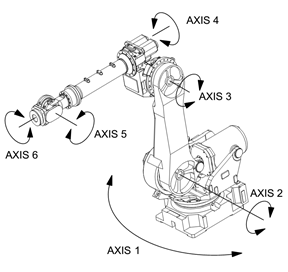
Drücken Sie COORD, um die Art der Bewegung zu ändern.Drücken Sie so lange, bis JOINT ausgewählt ist.Der Bewegungsmodus JOINT ist am einfachsten zu handhaben.Sie können die Gelenke einzeln verschieben.
Drücken Sie SHIFT + ±J1-8, um den Roboter zu bewegen.
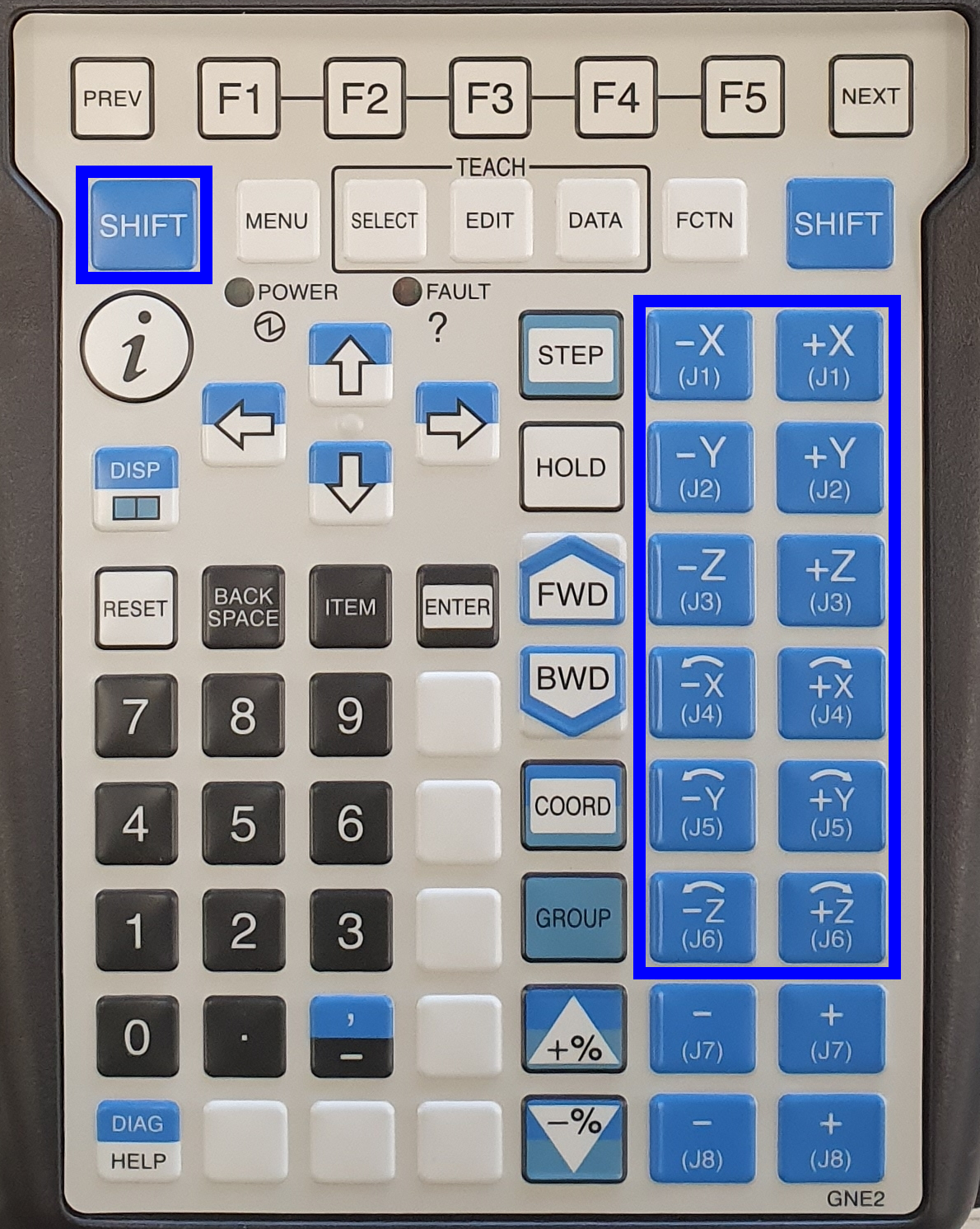
Drücken Sie SHIFT + +% oder -%, um die Geschwindigkeit anzupassen.
2.6. Mit 'Joint' die Startposition (Home) erreichen
Den Dialog verlassen, um die manuelle Bewegung zu beenden.
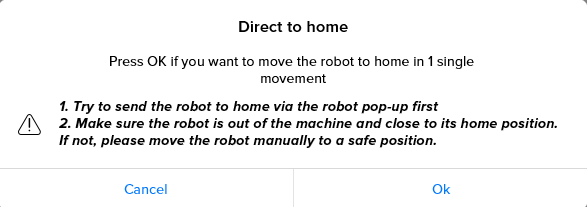
Auf die Taste klicken, um eine direkte Bewegung zur Startposition (Home) zu veranlassen.
Die direkte Bewegung zur Startposition (Home) bestätigen.ACHTUNG! Die Bewegung kann jederzeit durch Loslassen der Totmann-Schalter gestoppt werden, aber der Robot setzt die Bewegung fort, nachdem Fehler zurückgesetzt (Reset) wurden.
Der Robot wird dann genau zur Startposition (Home) bewegt.Abwarten, bis die Bewegung vollendet ist.
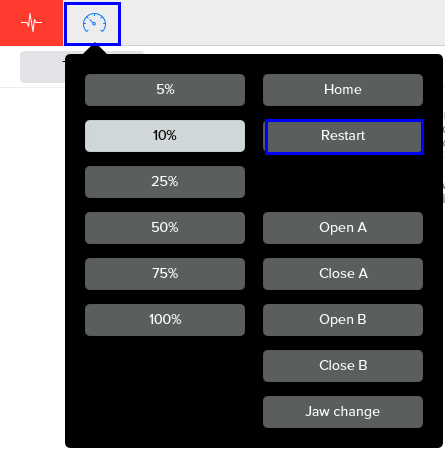
Wenn die direkte Bewegung nicht funktioniert oder wenn die Bewegung vollständig deaktiviert werden soll, ruft man das Robot 'Menu' auf und betätigt die Taste 'Neustart' (Restart).
2.7. Zurückschalten in den automatischen Modus
Stellen Sie den Dreistellungsschalter am Robot Controller auf AUTO.

Stellen Sie den Zwei-Positionen-Schalter am Teach Pendant auf Off.

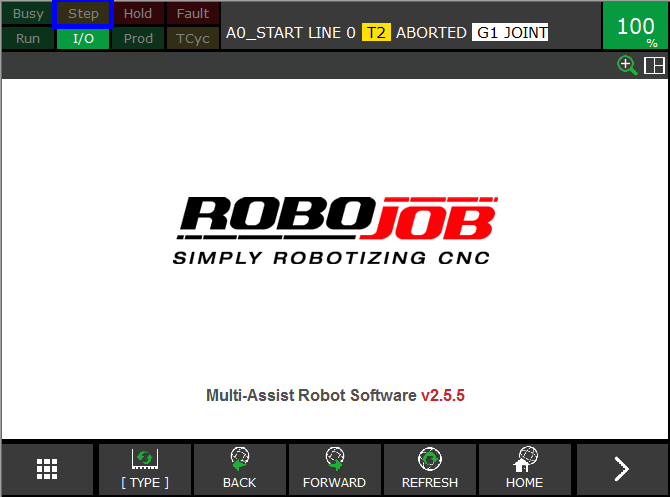
Stellen Sie sicher, dass der Step-Modus inaktiv ist. Verwenden Sie die STEP-Taste, um den Step-Modus umzuschalten.
3. So erhalten Sie weitere Hilfe
Zögern Sie nicht, uns zu kontaktieren, wenn Sie zusätzliche Unterstützung benötigen, die über die in der RoboJob Service Knowledge Base bereitgestellten Dokumente hinausgeht.
Sie können die RoboJob-Serviceabteilung auf folgende Weise kontaktieren:
-
Help Center: service.robojob.eu
-
E-Mail: service@robojob.eu
-
Telefon: +49 7134 9199 543
Wir bitten Sie, uns folgende Informationen zur Verfügung zu stellen:
-
Seriennummer xx-xx-xxx
-
Beschreibung des mangelhaften oder defekten Teils
-
Genauer Fehlercode oder Nachricht
-
Was hat der Roboter getan
-
Was sollte der Roboter tun
-
Bilder oder Videos
Sie können diese Informationen per E-Mail an uns senden.Um große Dateien zu senden, können Sie einen Dateiübertragungsdienst wie WeTransfer verwenden: robojob.wetransfer.com.
Eine automatische Bestätigung wird nach Erhalt Ihrer Mail gesendet.