Innen greifen - Multi-Assist
|
In diesem Dokument wird beschrieben, wie Sie die Software für das innere Greifen einrichten. |
1. Verwenden Sie folgende Werkzeuge
|
|

2. Vorgehensweise
2.1. Innenklauen sind erforderlich
Werkstücke können nur von innen mit Klauen gegriffen werden, die für das Greifen von innen konfiguriert sind. Bevor Sie starten, muss sichergestellt sein, dass Innenklauen vorhanden sind.
Aufruf 'Einstellungen - Settings', Auswahl von 'Konfigurieren - CONFIG' und dann 'Klauensets - Jawsets'.In diesem Bildschirm können neue Klauen definiert werden oder es können vorhandene Klauen geändert werden.Weitere Informationen über das Konfigurieren von Klauen finden Sie im Bedienerhandbuch.
Eine Klaue aus dem Aufklappmenu oben links auswählen.Im Tab 'Form - Shape' ist die Form der Klaue definiert.Mit der Form wird festgelegt, wie die Klaue genutzt werden kann.Neben den Maßen ist dort angegeben, ob die Oberfläche für das Greifen von innen oder von außen verwendet werden kann. Dabei bedeutet I (von) innen und O (von) außen.
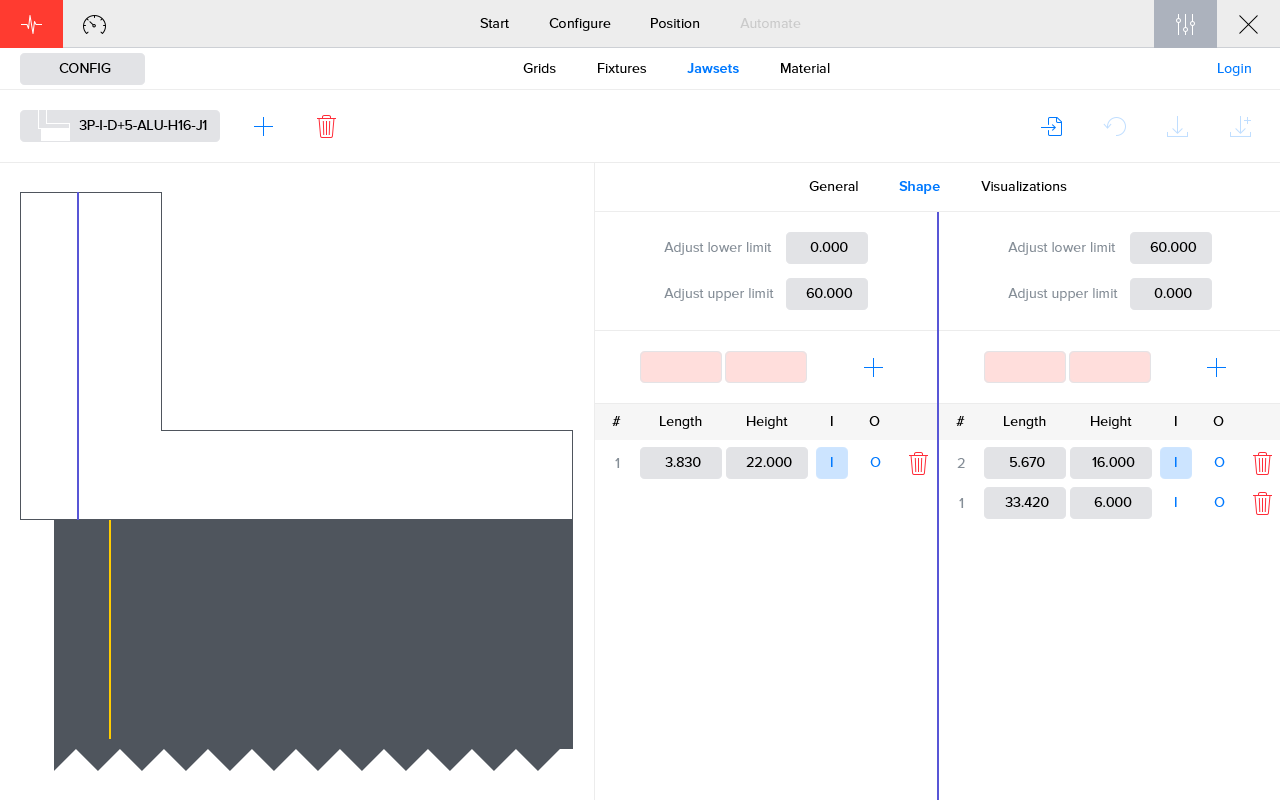
|
Der Name der Klaue gibt oft schon einen Hinweis, ob die entsprechende Klaue für das Greifen von außen oder von innen ausgelegt ist.Beispiele: '3P-E-D+0-ST-H16-J1' dient zum Greifen von außen und '3P-I-D+5-ST-H16-J1' dient zum Greifen von innen. |
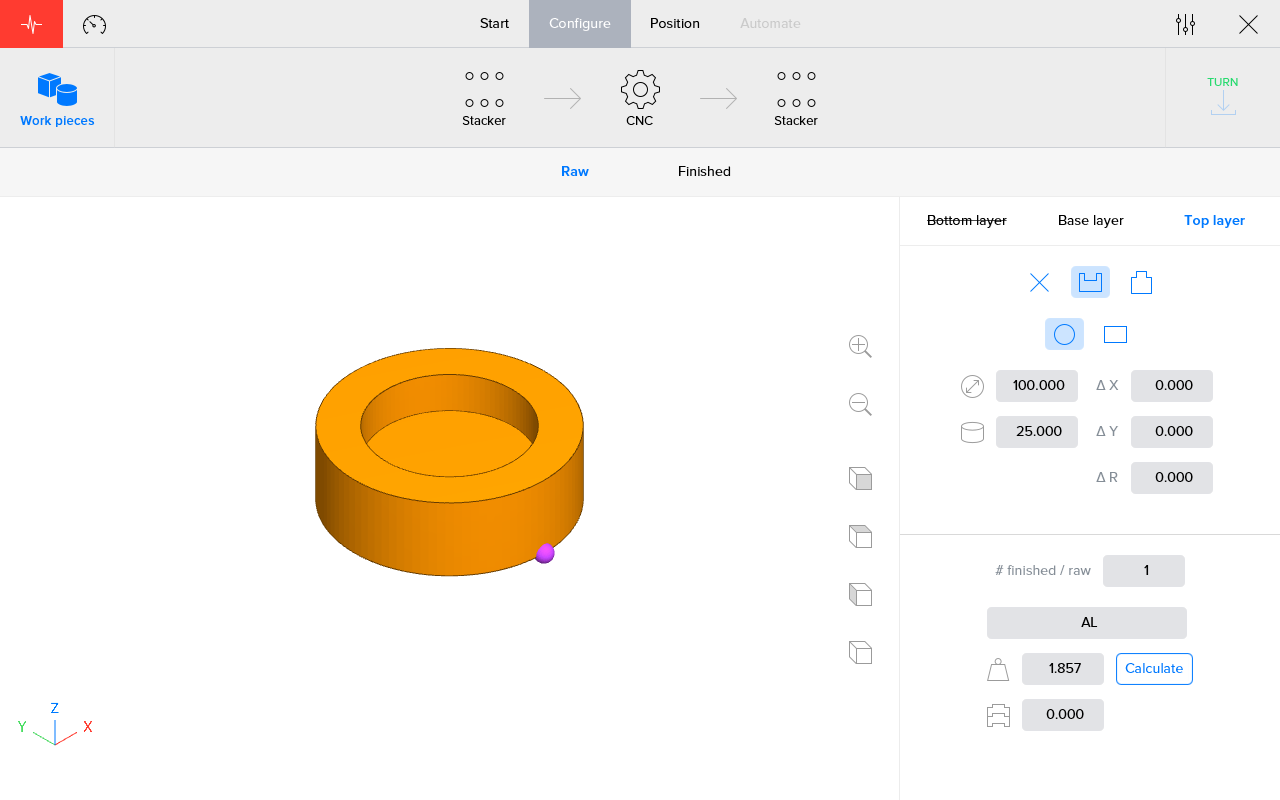
2.2. Definition eines Werkstück mit innerer Ebene (Layer)
Um das Greifen von innen zu ermöglichen, muss eine obere und eine untere Ebene mit einem Einschnitt (Cutout) definiert sein.Dieser Einschnitt muss für die Klauen groß und tief genug ausgelegt sein.
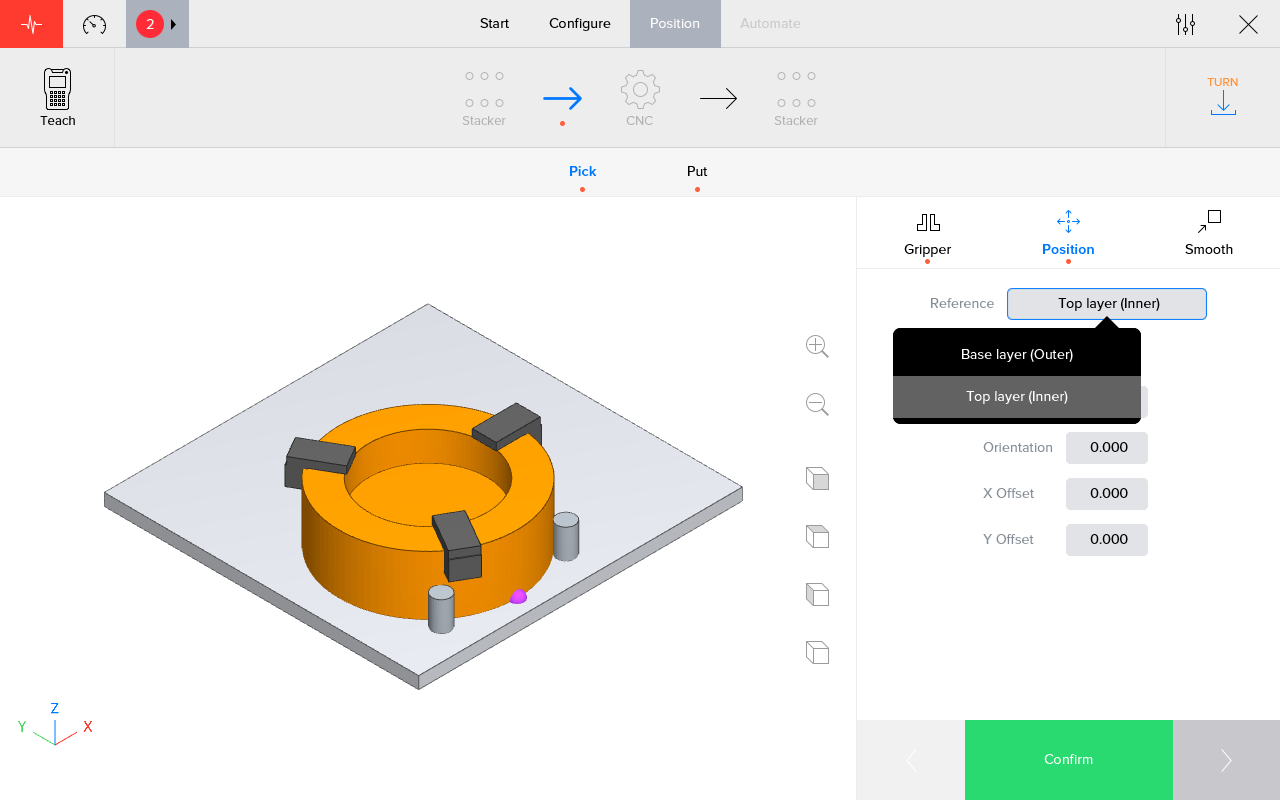
2.3. Innere Ebene zum Positionieren auswählen
Beim Positionieren den Schritt aufrufen, wo das Werkstück von innen gegriffen werden muss.Im Tab 'Positionieren - Position' muss die Referenz zur Ebene mit dem Einschnitt geändert werden.Die Referenzebene definiert, wie das Positionieren erfolgen muss. Sie definiert, ob das Werkstück von außen oder von innen gegriffen wird.
Es ist möglich, dass die Visualisierung hier nicht weiterhilft.Die Klauen am Greifer müssen noch zu Klauen geändert werden, die das Greifen von innen unterstützen.
2.4. Innere Klauen auswählen
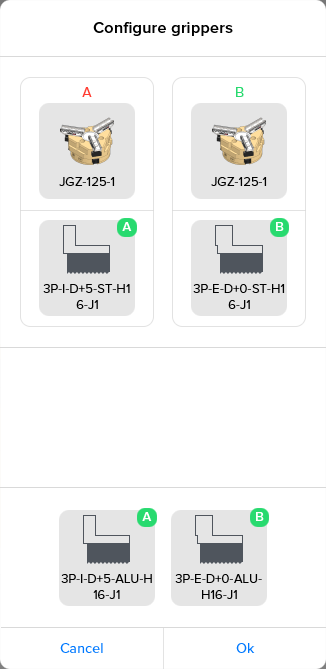
Den Tab 'Greifer - Gripper' auswählen und auf die Taste 'Konfigurieren - Configure' klicken.Damit werden die Klauen am Greifer konfiguriert.
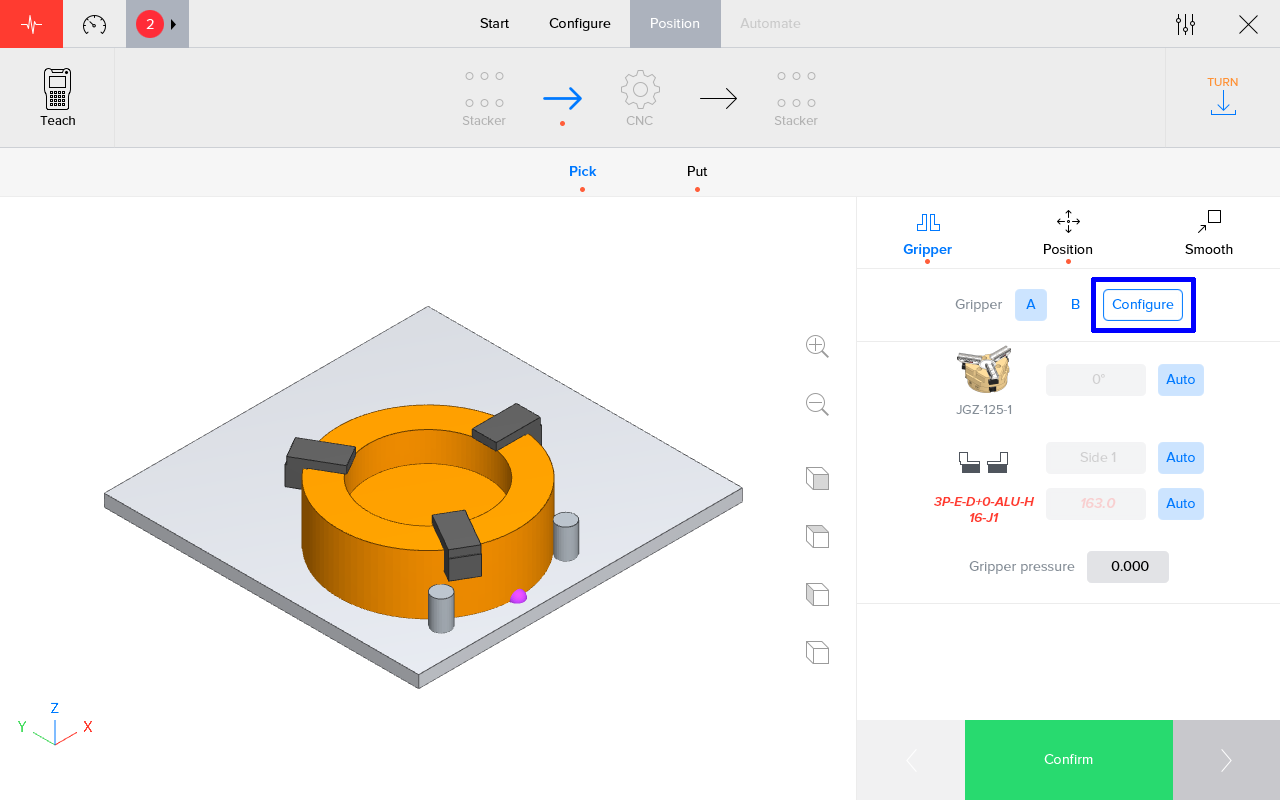
Die Klauen so ändern, dass sie von innen greifen können.Die Software zeigt in Grün an, welche Klauen für welchen Greifer geeignet sind.Die gewünschten Klauen aktivieren (Drag/Drop).
2.5. Automatisieren
Die Positionen prüfen und bestätigen.Den Vorgang starten.Die Werkstücke müssen jetzt entsprechend der gewählten Konfiguration von innen gegriffen werden.
3. So erhalten Sie weitere Hilfe
Zögern Sie nicht, uns zu kontaktieren, wenn Sie zusätzliche Unterstützung benötigen, die über die in der RoboJob Service Knowledge Base bereitgestellten Dokumente hinausgeht.
Sie können die RoboJob-Serviceabteilung auf folgende Weise kontaktieren:
-
Help Center: service.robojob.eu
-
E-Mail: service@robojob.eu
-
Telefon: +49 7134 9199 543
Wir bitten Sie, uns folgende Informationen zur Verfügung zu stellen:
-
Seriennummer xx-xx-xxx
-
Beschreibung des mangelhaften oder defekten Teils
-
Genauer Fehlercode oder Nachricht
-
Was hat der Roboter getan
-
Was sollte der Roboter tun
-
Bilder oder Videos
Sie können diese Informationen per E-Mail an uns senden.Um große Dateien zu senden, können Sie einen Dateiübertragungsdienst wie WeTransfer verwenden: robojob.wetransfer.com.
Eine automatische Bestätigung wird nach Erhalt Ihrer Mail gesendet.