Position unter Verwendung des X- und Y-Offsets ausgleichen - Multi-Assist
|
Der Roboter ist falsch ausgerichtet und weist einen Positionsfehler auf, wenn die Werkstücke vom Tisch genommen werden.In diesem Dokument wird beschrieben, wie Sie den Positionsfehler kompensieren können.Beachten Sie, dass dies eine vorübergehende Lösung ist und dass ein Eingriff eines RoboJob-Technikers erforderlich ist, um den Tabellenbenutzerrahmen neu zu messen. |
- 1. Verwenden Sie folgende Werkzeuge
-
2. Vorgehensweise
- 2.1. Einstellen der erforderlichen Offsets zur Aufnahme eines Werkstücks vom Tisch
- 2.2. Einstellen der erforderlichen Offsets zum Einsetzen des Werkstücks ins Spannfutter
- 2.3. Einstellen der erforderlichen Offsets zur Aufnahme des Werkstücks vom Spannfutter
- 2.4. Einstellen der erforderlichen Offsets zum Absetzen des Werkstücks auf dem Tisch
- 2.5. Allgemeines Vorgehen
- 2.6. Alternative Verfahren
- 2.7. Dauerhafte Lösung
- 3. So erhalten Sie weitere Hilfe
1. Verwenden Sie folgende Werkzeuge
|
|

2. Vorgehensweise
2.1. Einstellen der erforderlichen Offsets zur Aufnahme eines Werkstücks vom Tisch
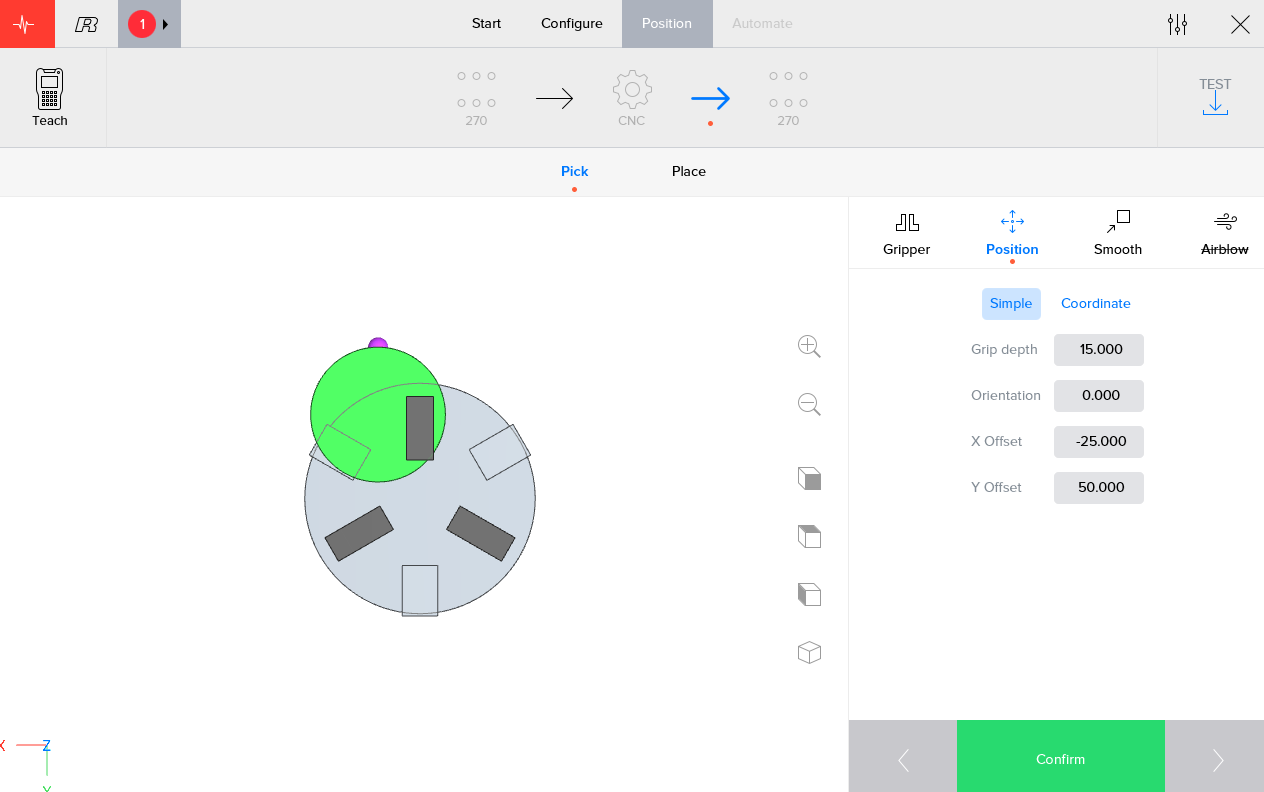
Starten Sie einen automatisierten Zyklus und halten Sie den Roboter an, sobald er ein Werkstück vom Tisch aufnimmt.Sie können dazu die Hold-Taste neben dem IPC-Bildschirm verwenden.Je näher sich die Greiferbacken des Roboters am Werkstück befinden, desto genauer können die erforderlichen Offsets gemessen werden.
|
Bewegen Sie den Roboter mit verringerter Geschwindigkeit, wenn er sich dem Werkstück nähert.So haben Sie genug Zeit, um vor einem eventuellen Zusammenstoß mit dem Werkstück zu reagieren und den Roboter anzuhalten. |
Messen Sie die erforderlichen Offsets mit einem Maßband und geben Sie diese in die Felder X Offset und Y Offset im IPC ein.Die Greiferbacken in der Darstellung bewegen sich vom Werkstück weg.Das Werkstück in der Darstellung bleibt an seiner „idealen - theoretischen“ Position.
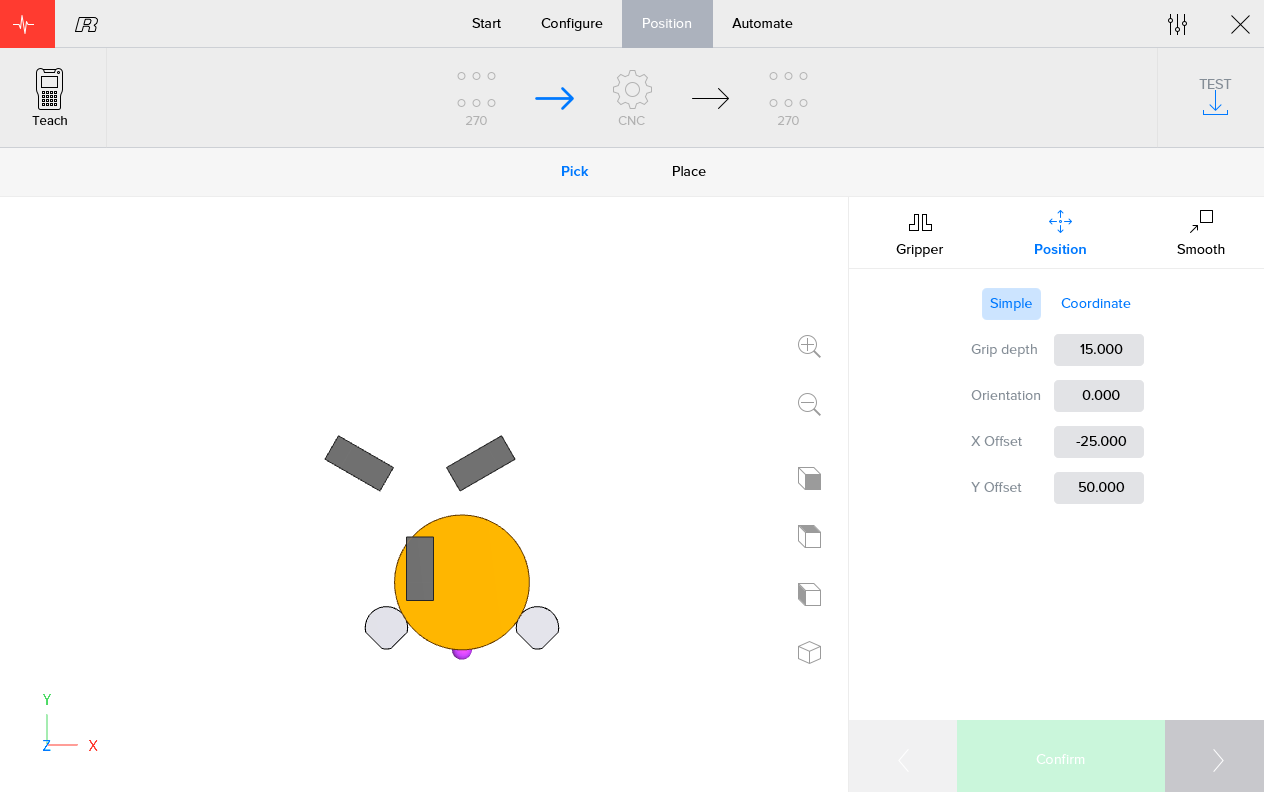
Brechen Sie die Automatisierung ab und starten Sie sie erneut, um zu prüfen, ob die gemessenen Offsets richtig sind.Diese Schritte müssen gegebenenfalls mehrmals ausgeführt werden, um die Offsets feineinzustellen.
2.2. Einstellen der erforderlichen Offsets zum Einsetzen des Werkstücks ins Spannfutter
Da wir im vorherigen Schritt einige Offsets eingestellt haben, denkt der Roboter, dass er das Werkstück dezentriert aufgenommen hat.Er gleicht dies aus, während er das Werkstück in das Spannfutter einsetzt.Daher sind die Robotergreifer nicht in der Mitte des Spannfutters, wie im nachstehenden Bild zu sehen.
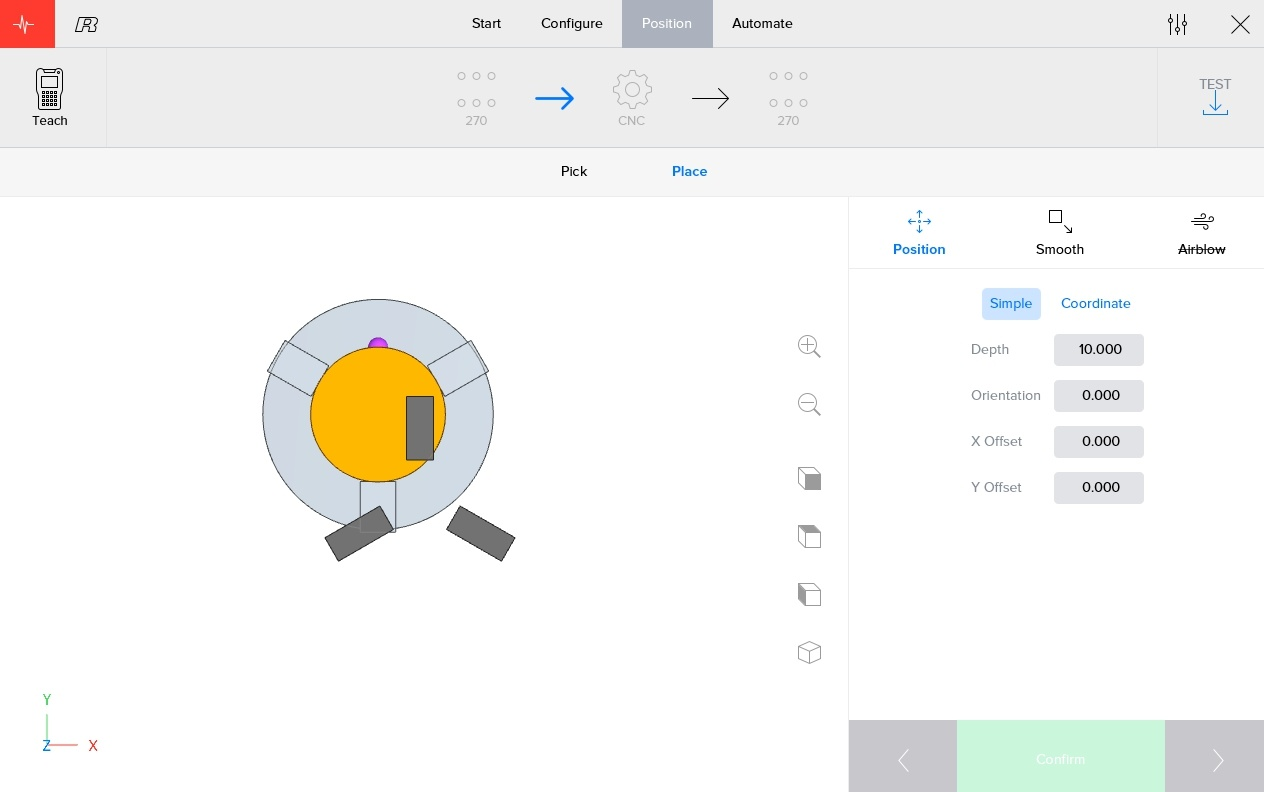
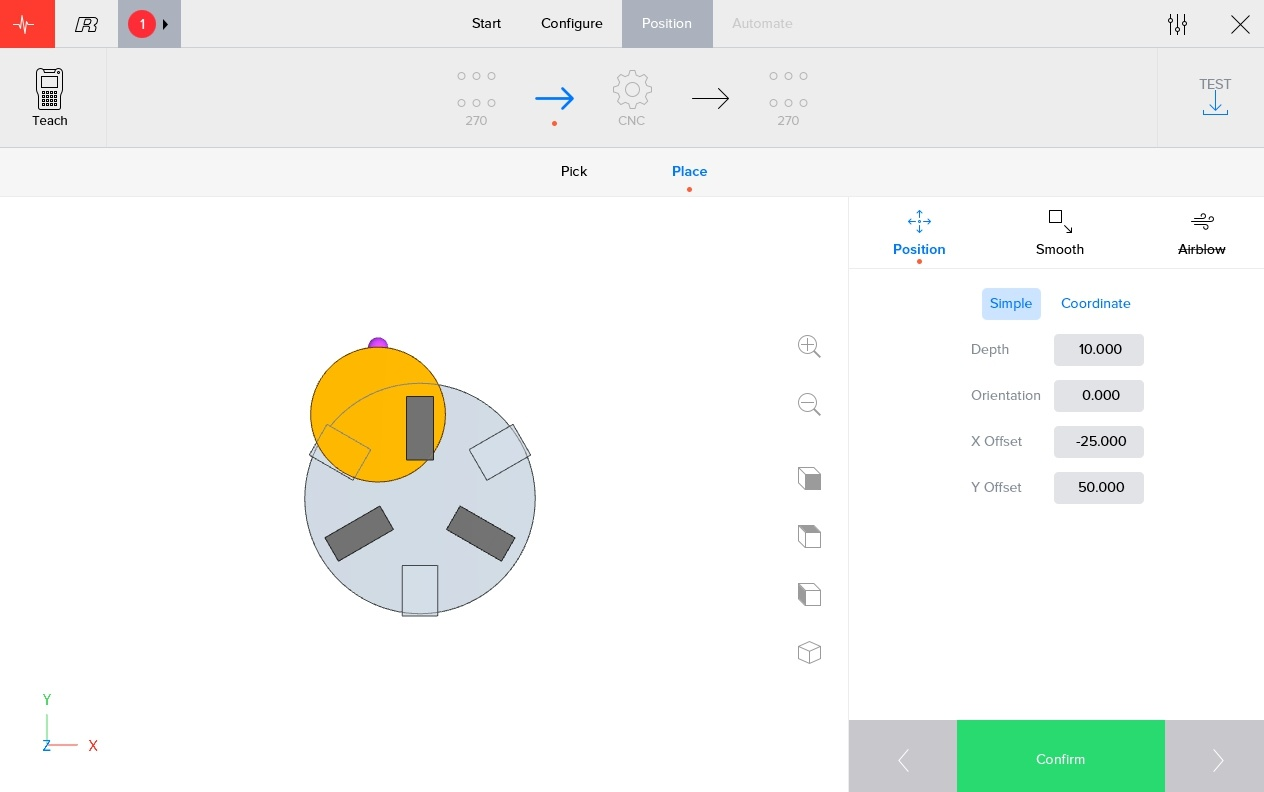
In Wirklichkeit befindet sich das Werkstück selbstverständlich in der Mitte der Robotergreifer.Aus diesem Grund müssen erneut einige Offsets eingegeben werden, um zu gewährleisten, dass die Greifer das Werkstück in die Mitte des Spannfutters setzen.Die in den Feldern X Offset und Y Offset einzugebenden Werte müssen mit den Werten des vorhergehenden Schritts übereinstimmen.Die Robotergreifer in der Darstellung bewegen sich in die Mitte des Spannfutters.Das virtuelle Werkstück in der Darstellung behält seine relative Position zu den Robotergreifern bei und steht nun nicht mehr in der Mitte des Spannfutters.Dies ist jedoch kein Problem, da wir wissen, dass sich das Werkstück in Wirklichkeit in der Mitte der Robotergreifer befindet.
Falls das Anwender-Koordinatensystem des Spannfutters nicht korrekt ist und Sie feststellen, dass das Werkstück nicht einwandfrei im Spannfutter zentriert ist, lässt sich dies ebenfalls durch weitere Veränderung der Offsets in diesem Schritt ausgleichen.
2.3. Einstellen der erforderlichen Offsets zur Aufnahme des Werkstücks vom Spannfutter
Da wir im vorherigen Schritt einige Offsets eingestellt haben, denkt der Roboter, dass er das Werkstück dezentriert in das Spannfutter eingesetzt hat.Er gleicht dies aus, während er das Werkstück vom Spannfutter aufnimmt.Daher sind die Robotergreifer nicht in der Mitte des Spannfutters, wie im nachstehenden Bild zu sehen.
|
Wenn die Option „Position fertiges Teil“ Ihres RoboJob-Systems aktiviert ist oder Ihr fertiges Teil von der Haupt- zur Gegenspindel weitergegeben wird, wird die Position des Werkstücks im Spannfutter „zurückgesetzt“.Es erscheint daher in der Mitte des Spannfutters, wo es sich tatsächlich befindet, und lässt sich ohne Verwendung von Offsets aufnehmen (natürlich mit Ausnahme der notwendigen Offsets für den Ausgleich falscher Anwenderkoordinaten am Spannfutter). |
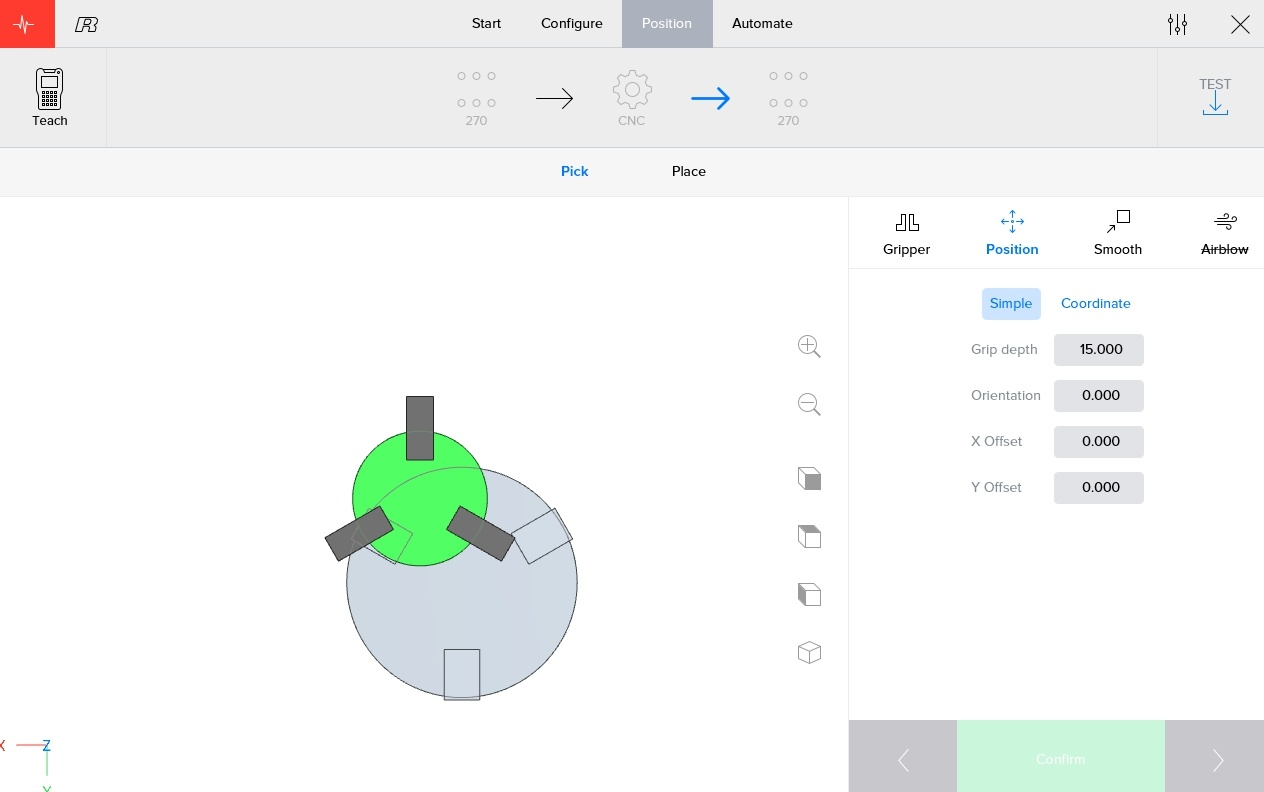
In Wirklichkeit befindet sich das Werkstück in der Mitte des Spannfutters.Um dies auszugleichen, müssen erneut einige Offsets eingegeben werden, um zu gewährleisten, dass die Robotergreifer das Werkstück in der Mitte des Spannfutters greifen.Die einzugebenden Werte müssen mit den Werten im vorhergehenden Schritt übereinstimmen.Sie sehen, dass sich die Robotergreiferbacken in die Mitte des Spannfutters bewegen, wo sich das wirkliche Werkstück befindet.Das virtuelle Werkstück in der Darstellung behält seine relative Position zum Spannfutter bei.
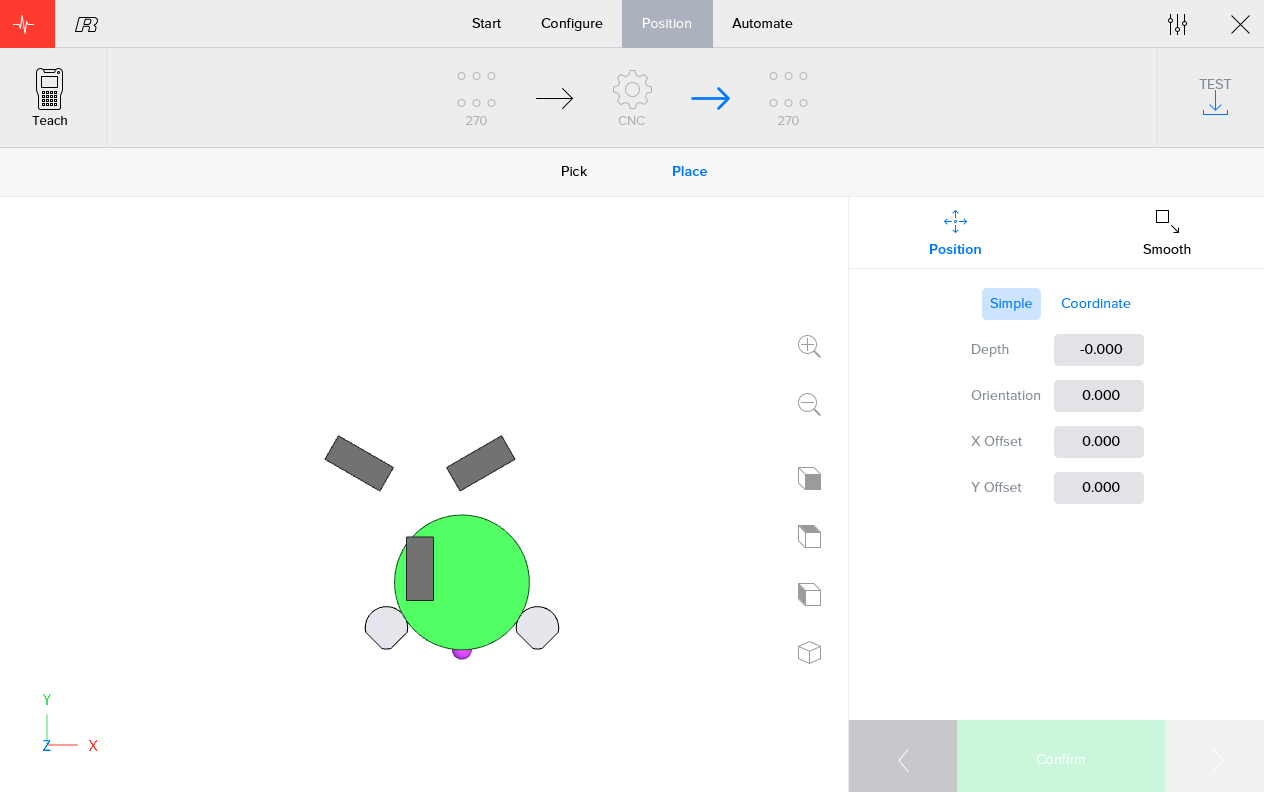
2.4. Einstellen der erforderlichen Offsets zum Absetzen des Werkstücks auf dem Tisch
Da wir im vorherigen Schritt einige Offsets eingestellt haben, denkt der Roboter, dass er das Werkstück dezentriert aufgenommen hat.Er gleicht dies aus, während er das Werkstück auf dem Tisch absetzt.Daher sind die Robotergreifer in Bezug auf die Mitte der beiden Pole nicht zentriert, wie im nachstehenden Bild zu sehen.In diesem Fall entspricht die Verschiebung dem im ersten Schritt eingegebenen Offset.Da das Werkstück auf demselben Tisch und damit im selben falschen Anwender-Koordinatensystem abgelegt wird wie im ersten Schritt, ist genau diese Verschiebung erforderlich, um das Werkstück in Wirklichkeit an der richtigen Stelle abzulegen.
2.5. Allgemeines Vorgehen
Wenn das Werkstück an einer anderen Position als im ersten Schritt abgelegt wird, zum Beispiel auf einer Palette, ist die Einstellung etwas komplizierter.In einem solchen Fall ist es wahrscheinlich einfacher, die richtigen Offsets durch Ausprobieren zu ermitteln.Die absoluten numerischen Werte der erforderlichen Offsets entsprechen meistens ungefähr den in Schritt 1 gefundenen Werten zuzüglich oder abzüglich weiterer Offsets, die erforderlich sind, wenn die anderen Anwenderkoordinaten ebenfalls geringfügig abweichen.
2.6. Alternative Verfahren
Es ist auch möglich, den Roboter unter Verwendung des Handprogrammiergeräts manuell zu den Aufnahme- oder Ablagepositionen zu führen.Dies ist in der Bedienungsanleitung beschrieben.
2.7. Dauerhafte Lösung
Um dieses Problem dauerhaft zu lösen, müssen die betroffenen Anwenderkoordinaten von einem RoboJob-Techniker neu konfiguriert werden.Bitte vereinbaren Sie dazu einen Termin mit dem RoboJob-Kundendienst.
3. So erhalten Sie weitere Hilfe
Zögern Sie nicht, uns zu kontaktieren, wenn Sie zusätzliche Unterstützung benötigen, die über die in der RoboJob Service Knowledge Base bereitgestellten Dokumente hinausgeht.
Sie können die RoboJob-Serviceabteilung auf folgende Weise kontaktieren:
-
Help Center: service.robojob.eu
-
E-Mail: service@robojob.eu
-
Telefon: +49 7134 9199 543
Wir bitten Sie, uns folgende Informationen zur Verfügung zu stellen:
-
Seriennummer xx-xx-xxx
-
Beschreibung des mangelhaften oder defekten Teils
-
Genauer Fehlercode oder Nachricht
-
Was hat der Roboter getan
-
Was sollte der Roboter tun
-
Bilder oder Videos
Sie können diese Informationen per E-Mail an uns senden.Um große Dateien zu senden, können Sie einen Dateiübertragungsdienst wie WeTransfer verwenden: robojob.wetransfer.com.
Eine automatische Bestätigung wird nach Erhalt Ihrer Mail gesendet.