Robot für Transpot vorbereiten
|
Der Robot muss für den Transport vorbereitet werden.Diese Richtlinien beschreiben, wie der Robot für den Transport vorbereitet wird. |
- 1. Verwenden Sie folgende Werkzeuge
- 2. Vorgehensweise
- 3. So erhalten Sie weitere Hilfe
1. Verwenden Sie folgende Werkzeuge
|
|
|

2. Vorgehensweise
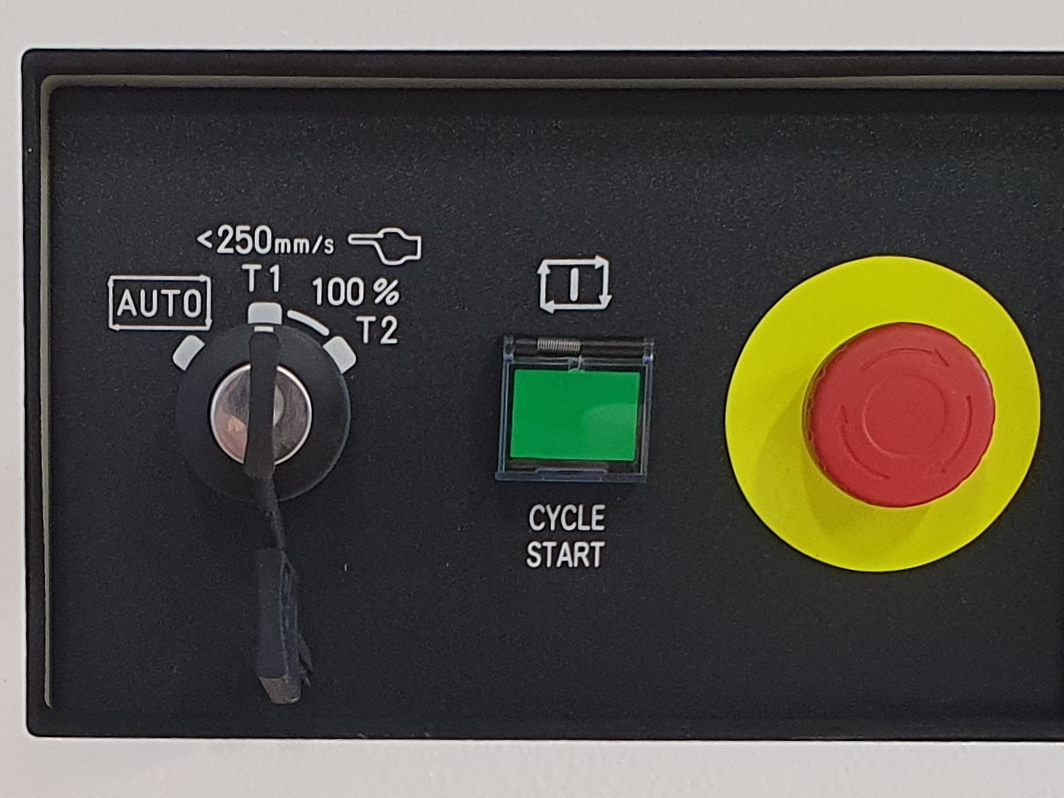
2.1. Den Robot auf 'manuellen Betrieb' stellen
Den Dreifach-Schalter am Robot Controller auf T1 stellen.
Den Zweifach-Schalter am Teach Pendant auf On stellen.

2.2. Alle laufenden Programme abbrechen
Die RoboJob Kommunikationsprogramme am Robot laufen immer noch.
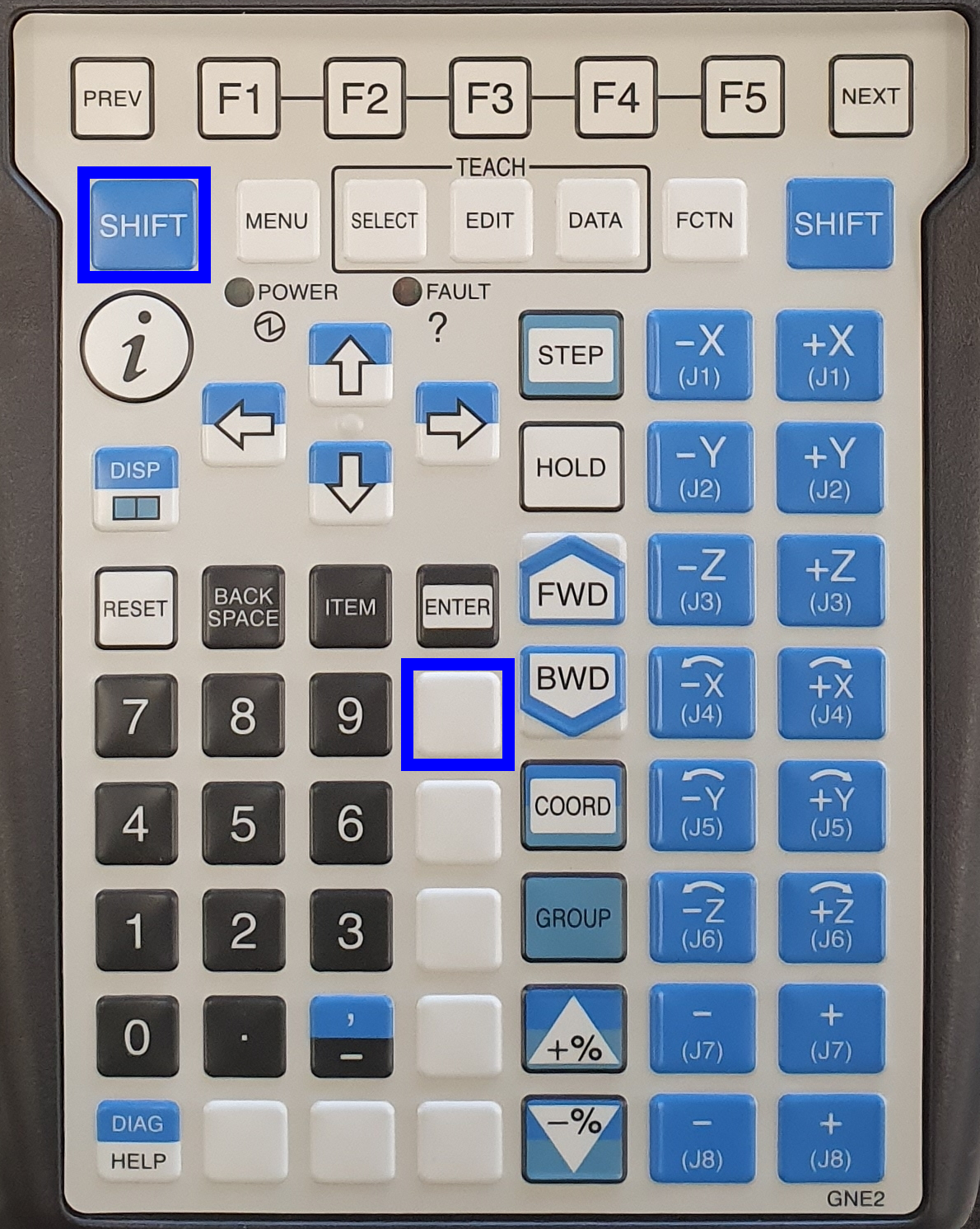
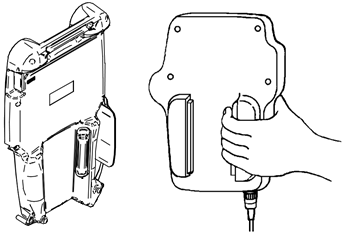
Das Abbrechen erfolgt mit der Tastenkombination SHIFT + USER KEY 1.Der USER KEY 1 ist die erste Taste unter ENTER.Dieser wird manchmal auch als Unmarked Key 1, Tool 1 oder Unnamed 1 bezeichnet.Bei neueren Versionen des Teach Pendant ist diese Taste eine weiße Taste ohne Beschriftung.Bei älteren Versionen des Teach Pendant ist diese Taste die blaue WELD ENBL Taste.
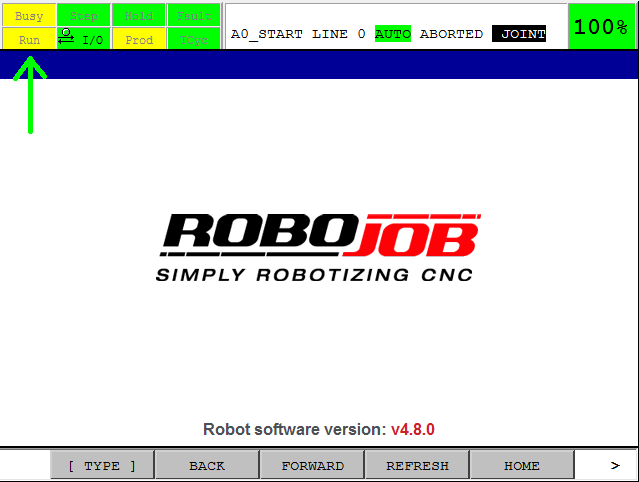
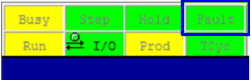
Überprüfen, dass die Software gestoppt wurde.Die Anzeigen 'Busy' und 'Run' oben links am Bildschirm müssen jetzt gelb sein.
2.3. Alle Fehler zurücksetzen (Reset) und den Robot manuell bewegen
Um den Robot sicher bewegen zu können, muss ein Totmann-Schalter an der Rückseite des Teach Pendant auf die sichere Mittenposition gestellt sein.
Beide Totmann-Schalter haben 3 Stellungen:
-
Nicht betätigt
-
Sichere Mittenposition
-
Voll betätigt
Probieren Sie, ob Sie die drei Stellungen fühlen können.Zum Zurücksetzen des Fehlers und Bewegen des Robots muss nur einer der beiden Totmann-Schalter auf die sichere Mittenposition gestellt werden.Deshalb den Totmann-Schalter nicht zu hart und auch nicht zu weich betätigen!
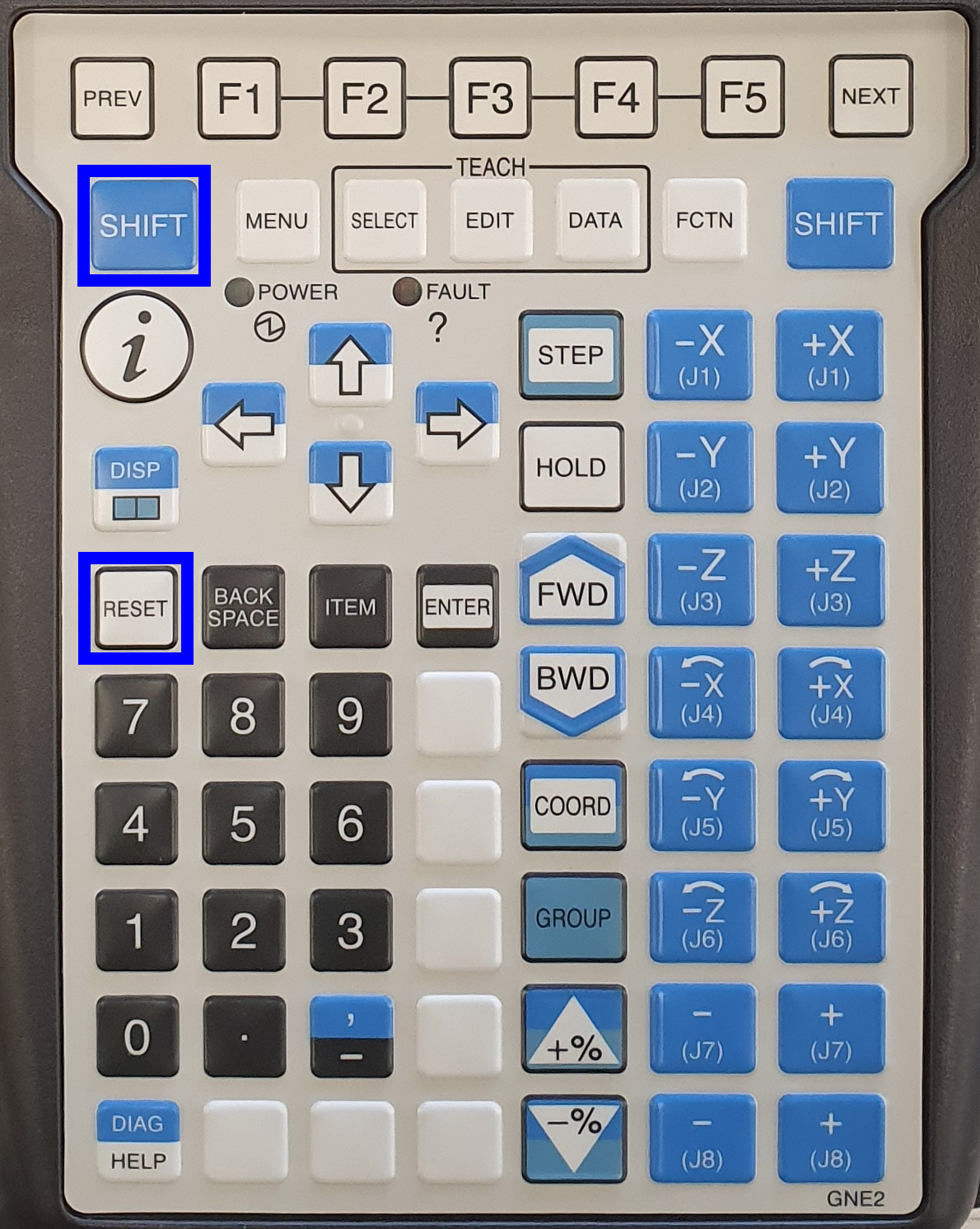
Mit SHIFT + RESET werden alle Fehler zurückgesetzt (Reset). Die Fehleranzeige springt auf Grün.
Jetzt kann der Robot bewegt werden.
| Hinweis |
ACHTUNG!Der Robot darf beim Bewegen nichts berühren.Immer auf umstehende Personen, Maschinen im Bereich, andere Objekte und den Robot selbst achten.Die aus dem Robot herausgeführten Kabel dürfen nicht beschädigt werden.
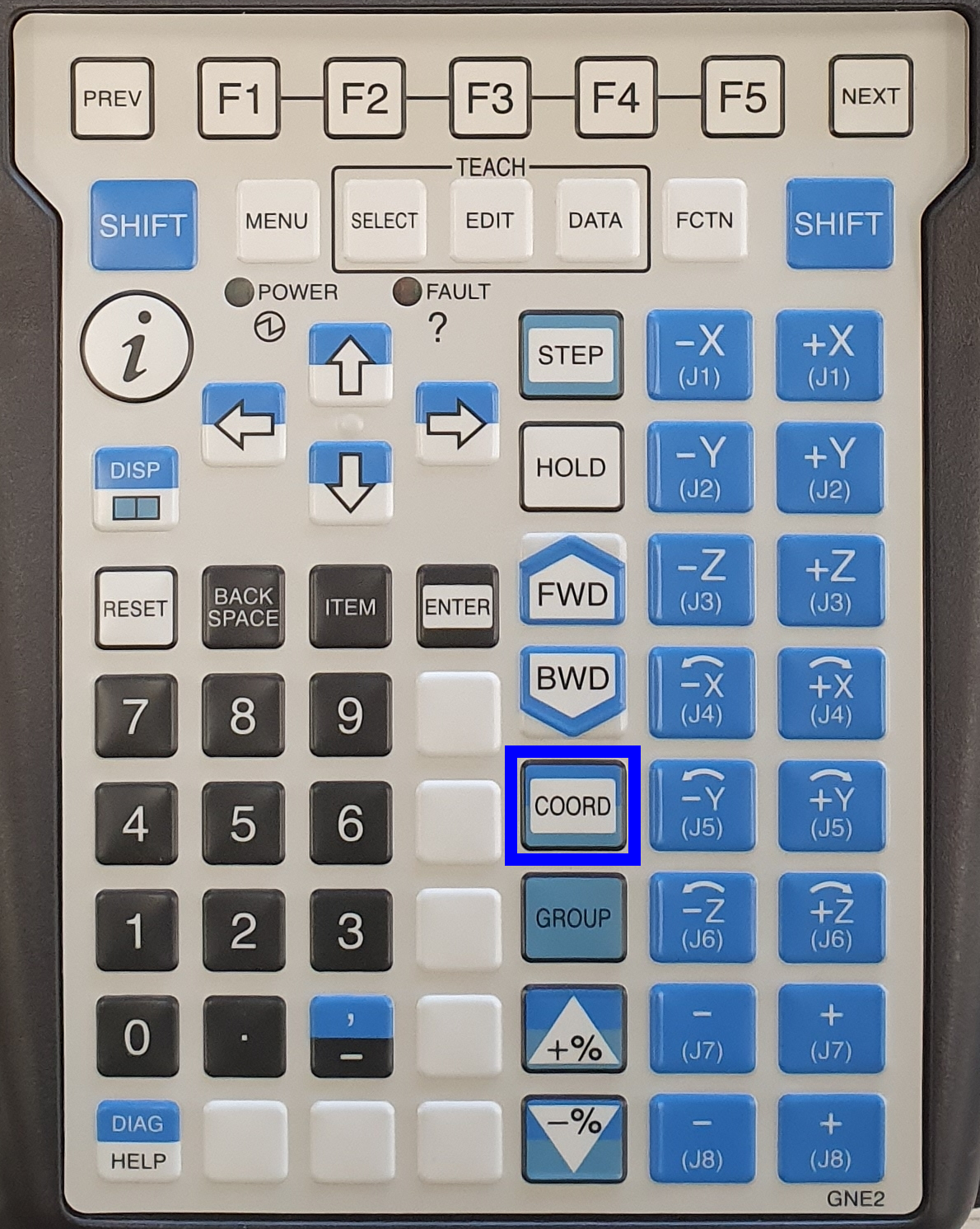
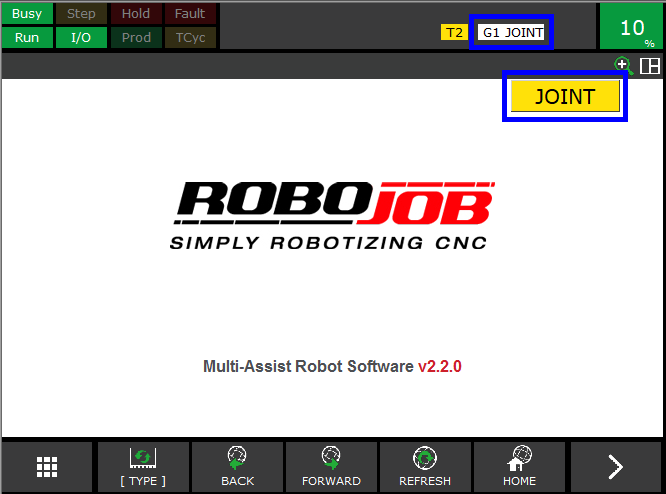
Die Bewegungsrichtung kann mit COORD geändert werden. Gedrückt halten, bis JOINT ausgewählt ist.Die Betriebsart JOINT ist die einfachste Art der Bewegung.Die einzelnen Joint-Punkte werden vom Robot nacheinander angefahren.
|
|
|
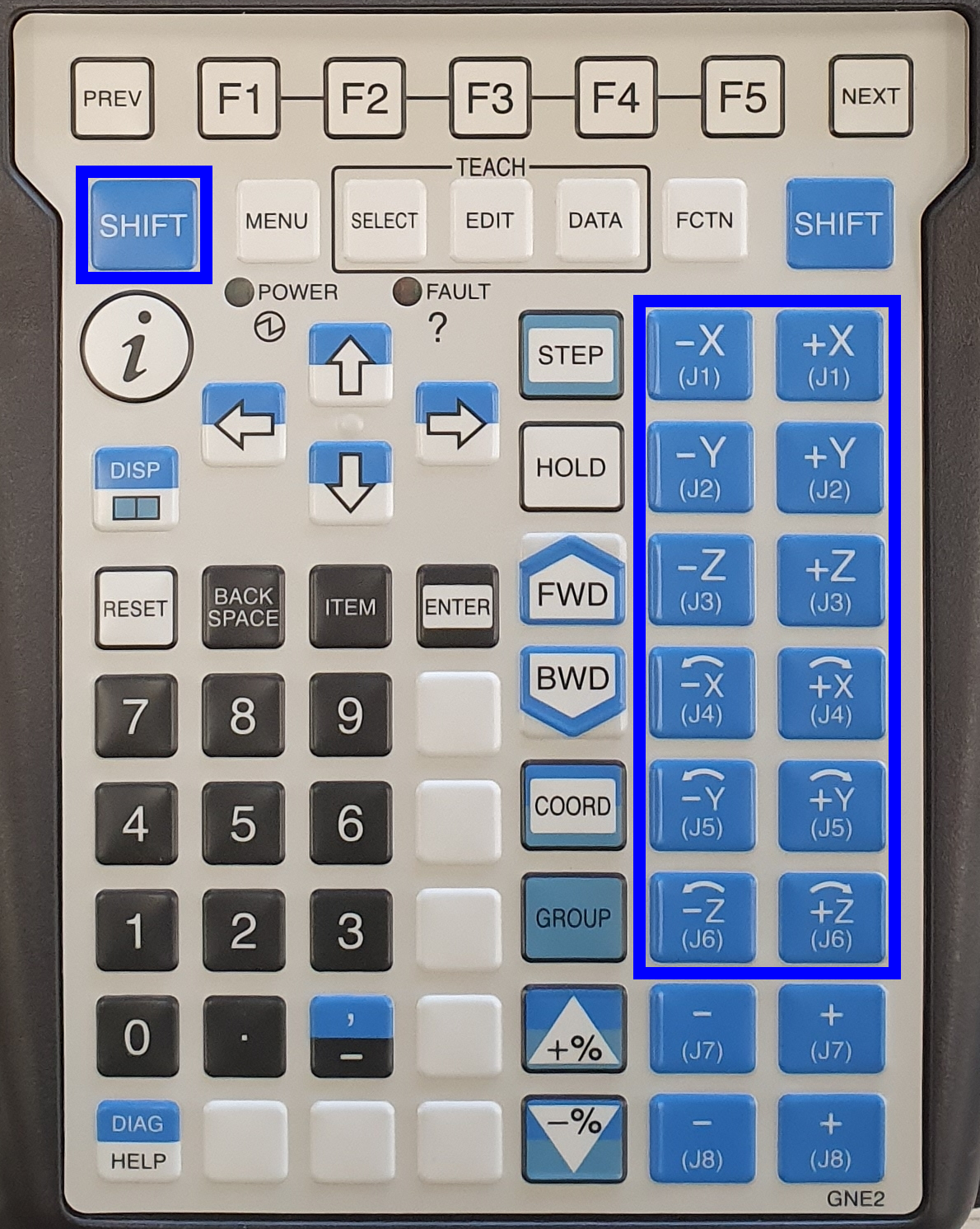
SHIFT + ±J1-8 betätigen, um den Robot zu bewegen.
|
|
|
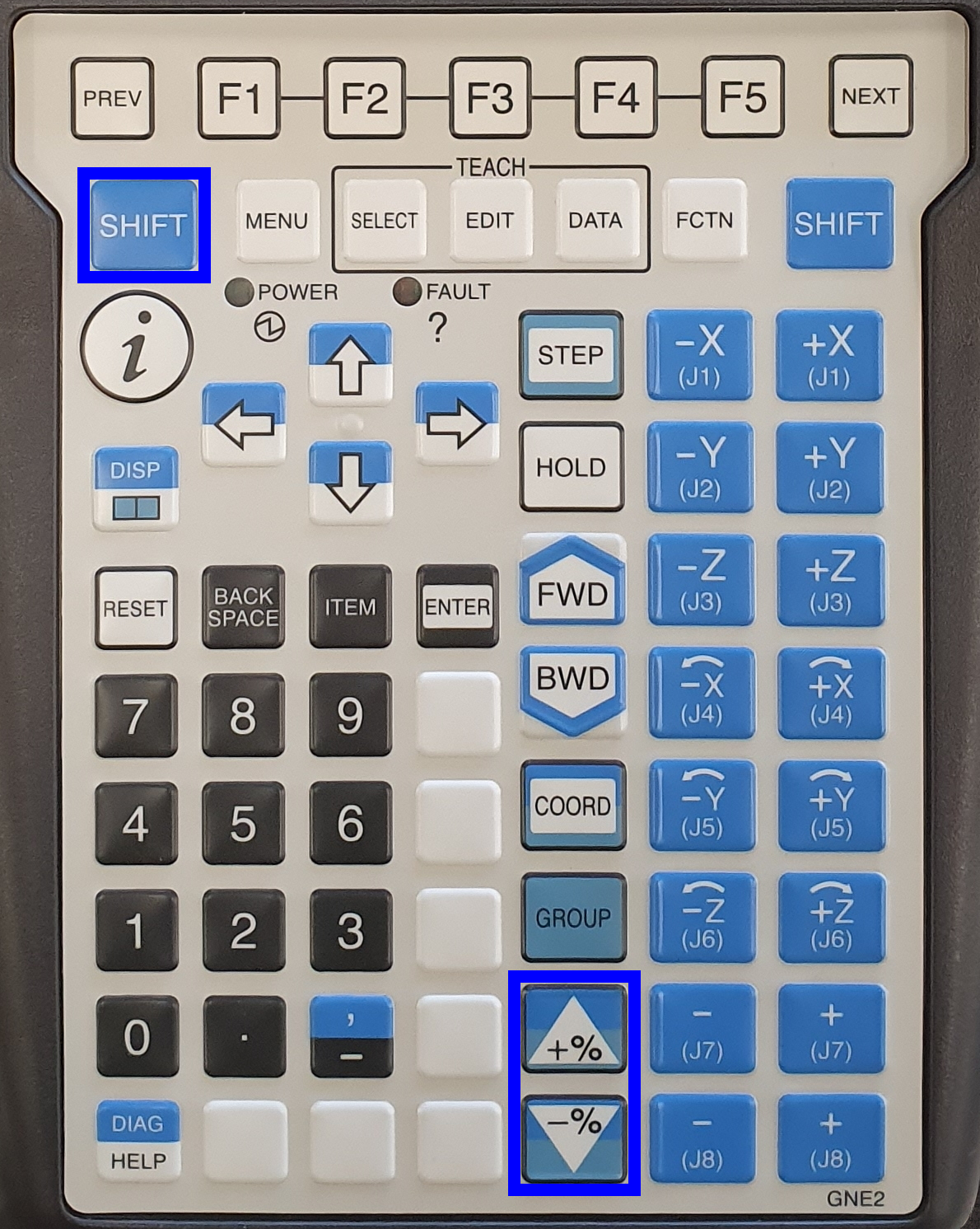
Mit SHIFT + +% oder -% wird die Geschwindigkeit (Speed) geregelt.
2.4. Bewegungsprogramm ausführen
In manchen Fällen kann ein Hilfsprogramm zur Bewegung auf eine vordefinierte Position benutzt werden.
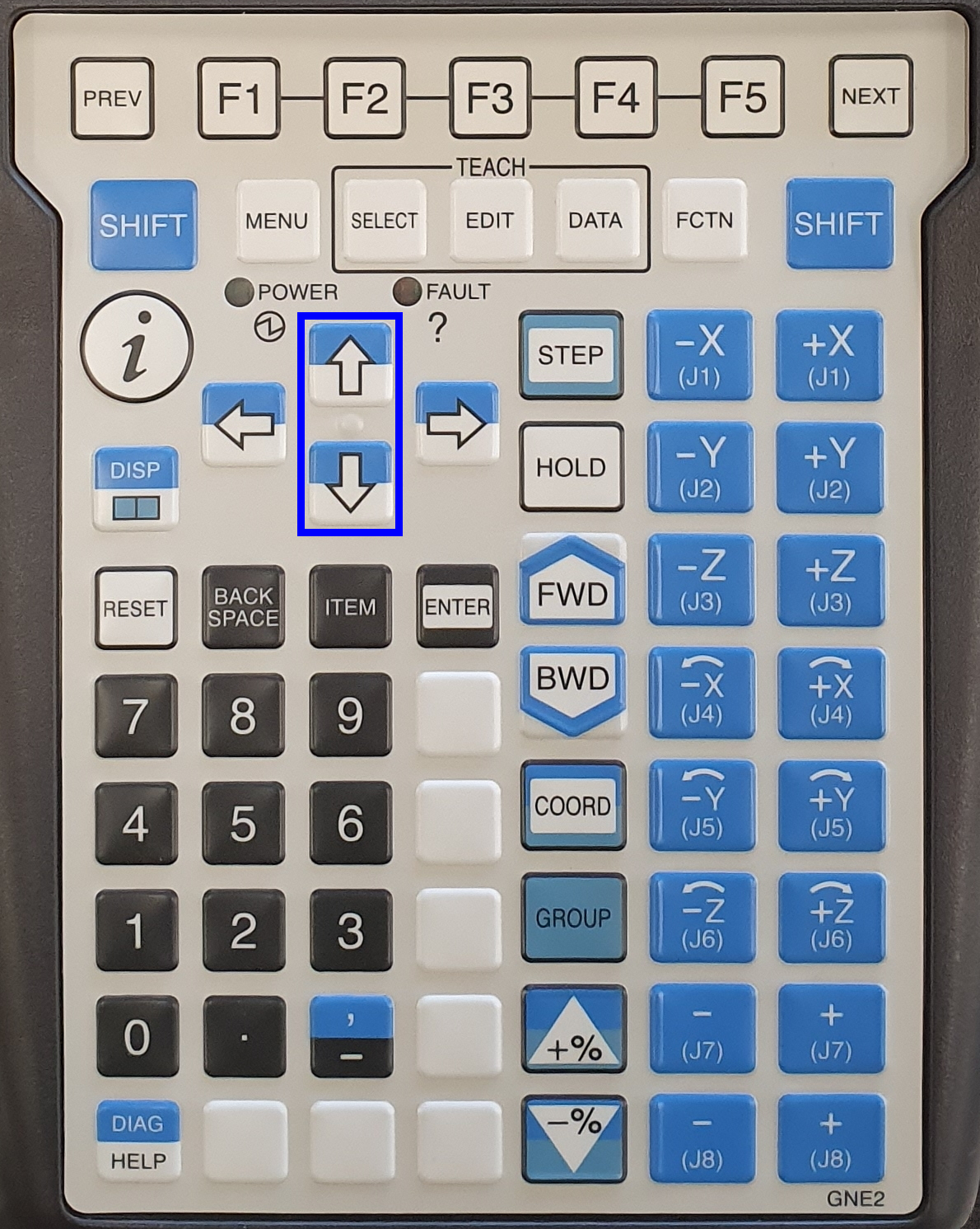
Mit SELECT wird die Programm-Auswahl geöffnet. Mit UP und DOWN wird das Hilfsprogramm ausgewählt.Mit SHIFT kann schneller gescrollt (gerollt) werden.
Wenn das Hilfsprogramm ausgewählt wurde, kann das Programm mit ENTER geöffnet werden.
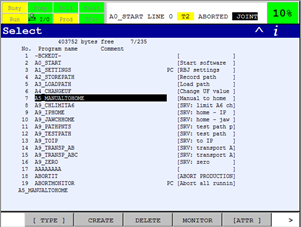
Wenn A5_MANUALTOHOME ausgewählt wurde, kann das Programm mit ENTER geöffnet werden.
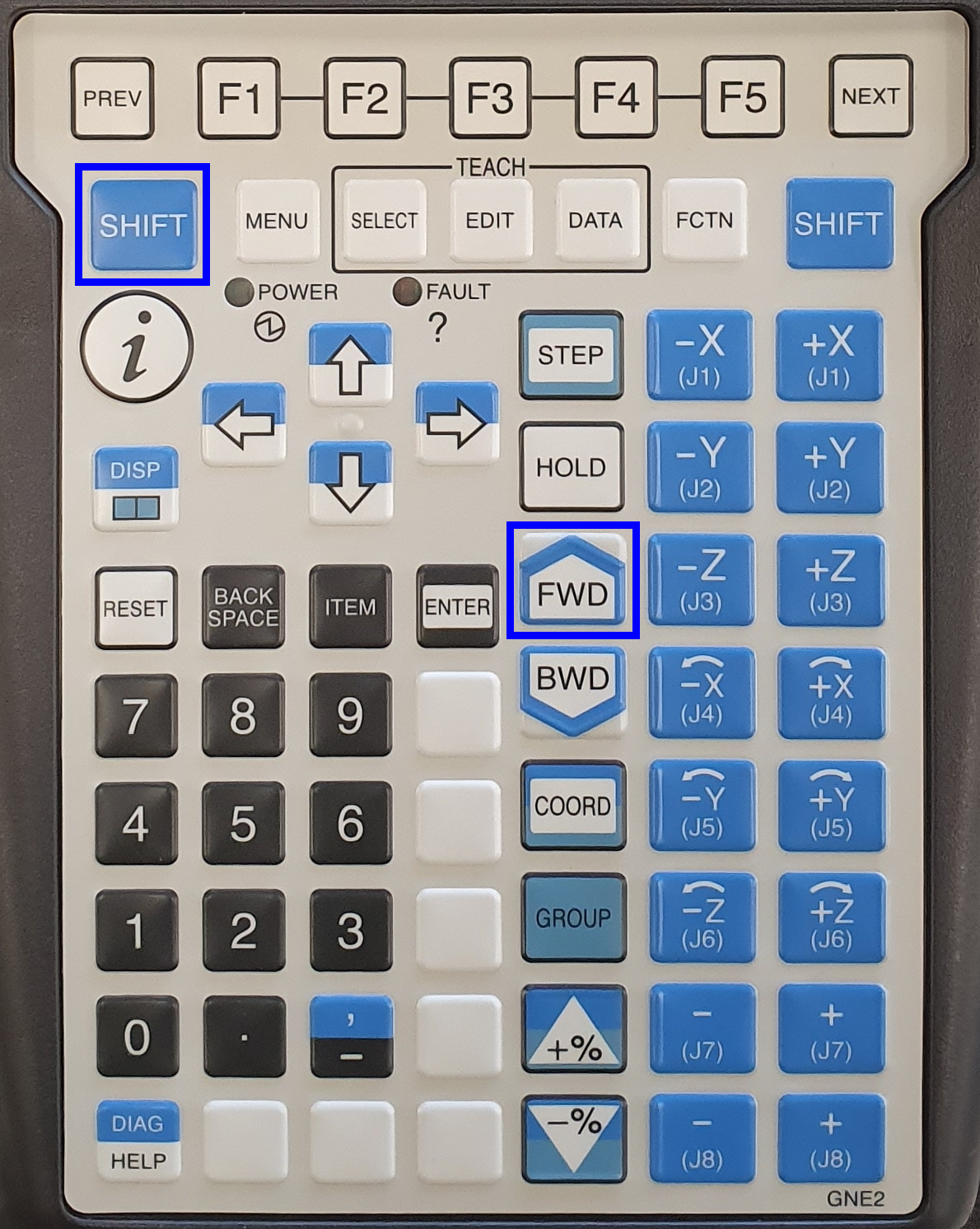
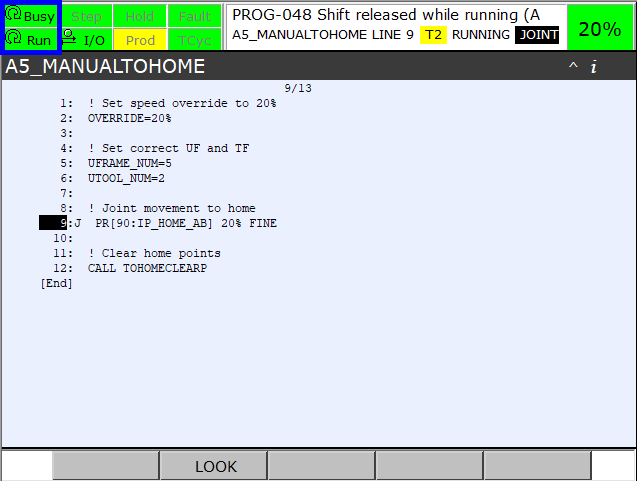
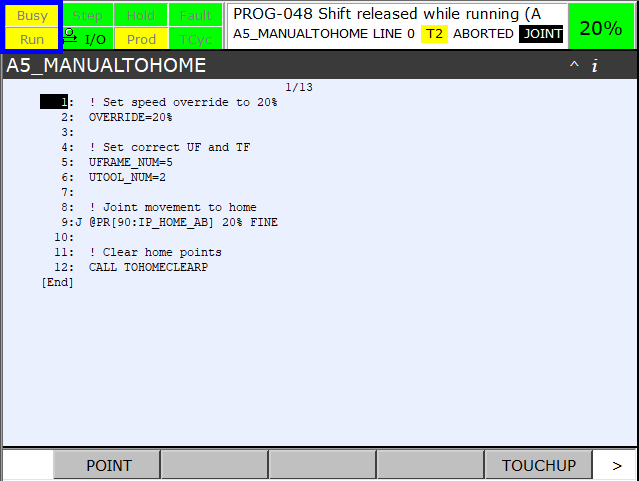
Das Programm wird durch Betätigen von SHIFT + FWD ausgeführt.Der Robot führt die im Programm gespeicherten Schritte aus.Bei Bedarf dann die Taste SHIFT oder den Totmann-Schalter loslassen, um die Bewegung zu stoppen.
Die Anzeigen 'Busy' und 'Run' leuchten während der Bewegung grün.Die Taste SHIFT und einen der Totmann-Schalter betätigt halten, bis das Programm beendet ist.
| Hinweis |
ACHTUNG!Der Robot darf beim Bewegen nichts berühren.Immer auf umstehende Personen, Maschinen im Bereich, andere Objekte und den Robot selbst achten.Die aus dem Robot herausgeführten Kabel dürfen nicht beschädigt werden.
Wenn der Robot das Programm beendet hat, schalten die Anzeigen 'Busy' und 'Run' wieder auf Gelb um, und die erste Zeile des Programms wird ausgewählt.
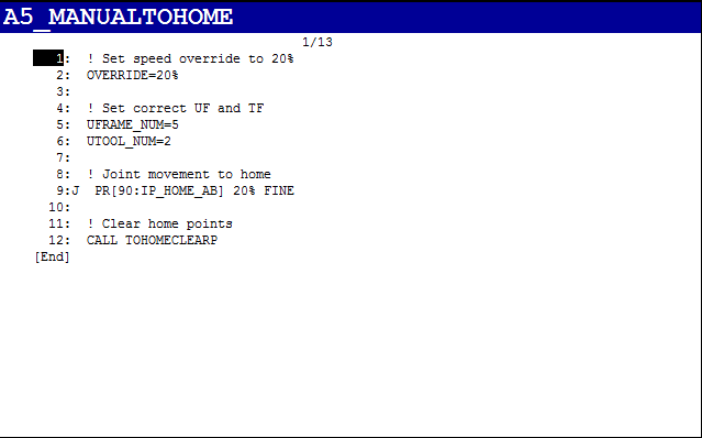
2.4.1. A5_MANUALTOHOME
Mit dem Programm A5_MANUALTOHOME kann der Robot auf die Startposition (Home) bewegt werden, die während der Installation 'gelernt' wurde.Nach der manuellen Bewegung muss der Robot mit diesem Programm zurück auf die Startposition (Home) geführt werden, bevor er mit der Software wieder im automatischen Betrieb genutzt werden kann.
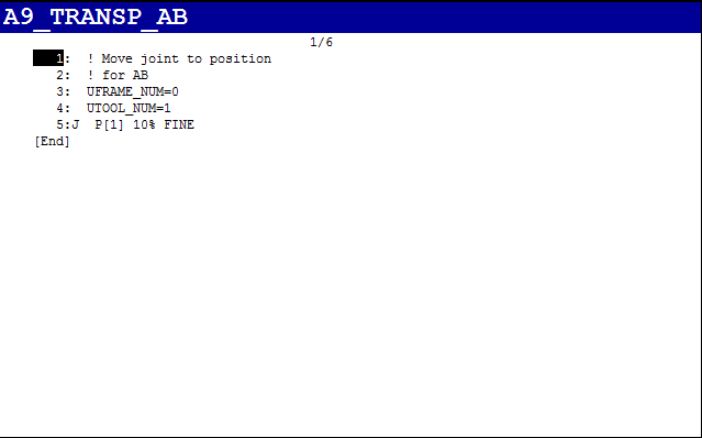
2.4.2. A9_TRANSP_AB
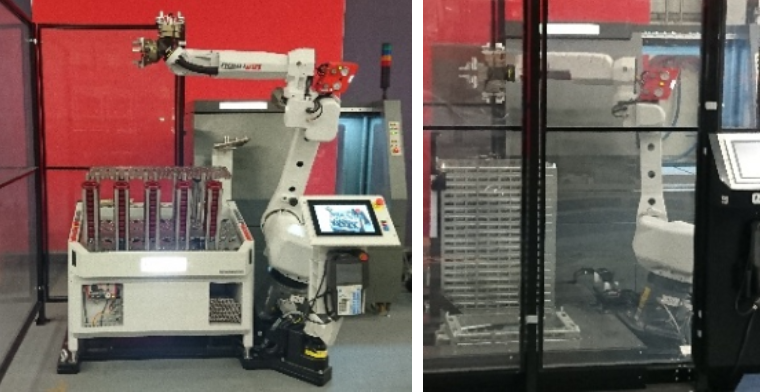
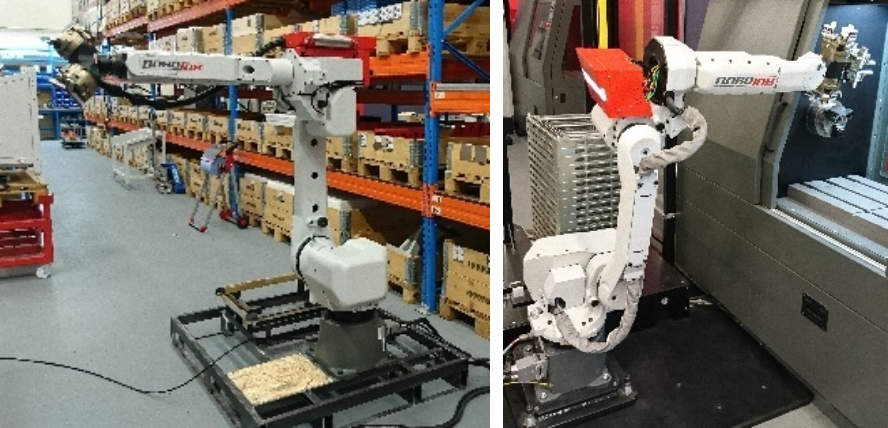
Das Programm A9_TRANSP_AB dient dazu, Robots bis zu einem Gewicht von bis zu 35 kg in eine gute Position für den Transport zu bringen.Nach Möglichkeit diese Position nutzen, wenn der Robot auf einer Palette oder auf einer festen Platte transportiert werden soll.Diese Position ist für einen Robot mit 90° Greiferköpfen mit A und B Greifer bestimmt.Bitte beachten, wie der Greiferkörper in den nachstehenden Abbildungen ausgerichtet ist.
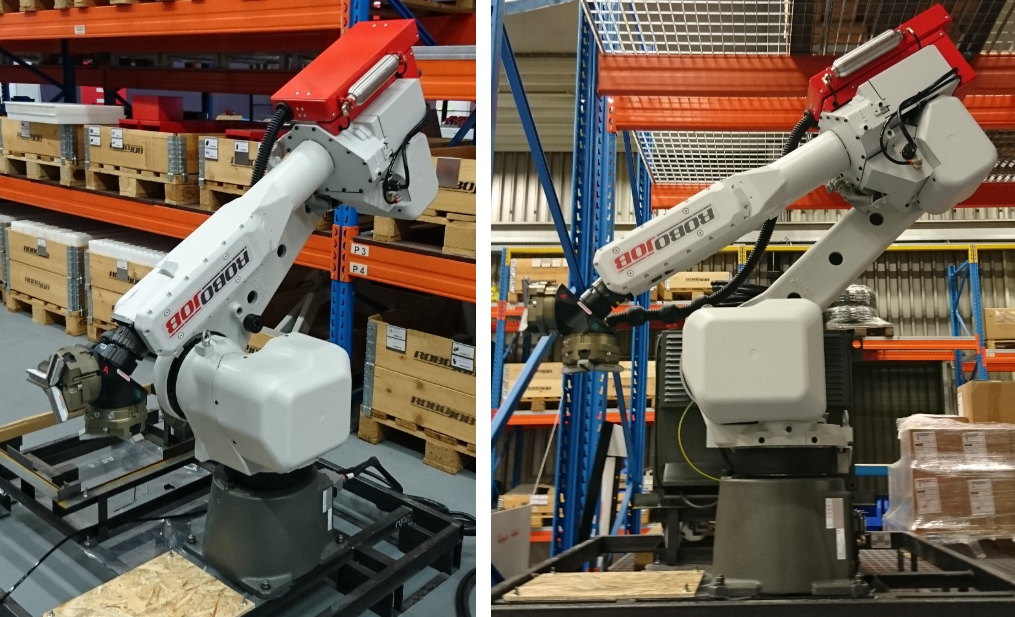
2.4.3. A9_TRANSP_ABC
Das Programm A9_TRANSP_ABC dient dazu, Robots bis zu einem Gewicht von bis zu 35 kg in eine gute Position für den Transport zu bringen.Nach Möglichkeit diese Position nutzen, wenn der Robot auf einer Palette oder auf einer festen Platte transportiert werden soll.Diese Position ist für einen Robot mit 180° Greiferköpfen mit A, B und optional C Greifer bestimmt.Bitte beachten, wie der Greiferkörper in den nachstehenden Abbildungen ausgerichtet ist.
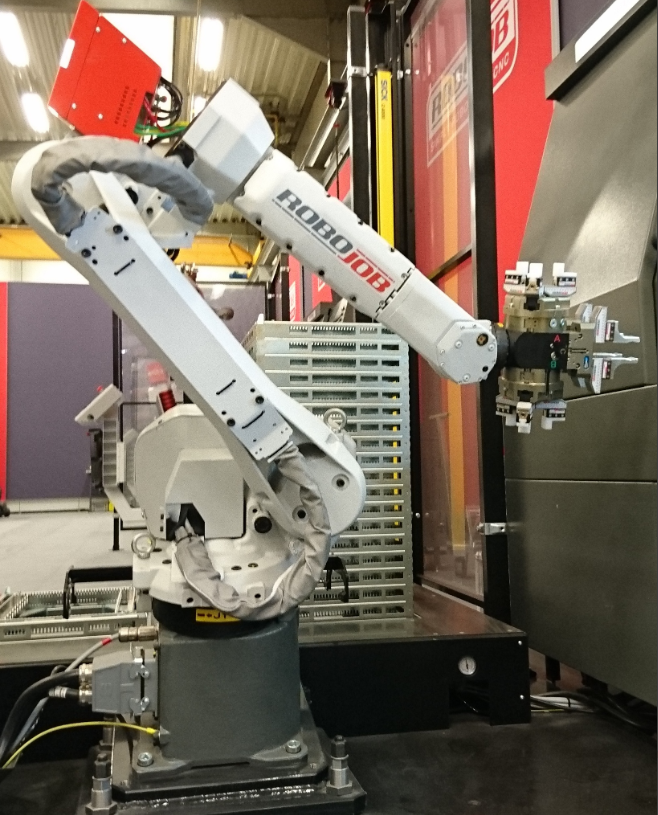
2.4.4. A9_ZERO
Das Programm A9_ZERO dient dazu, den Robot auf eine Position zu bewegen, wo alle Joint Werte null sind.
2.5. Den Robot aus seiner Halterung herausnehmen
Wenn der Robot nicht an einer Grundplatte installiert ist, sondern am Boden verankert ist, muss der Robot abgenommen (demontiert) werden.
2.5.1. Robot auf Position bringen
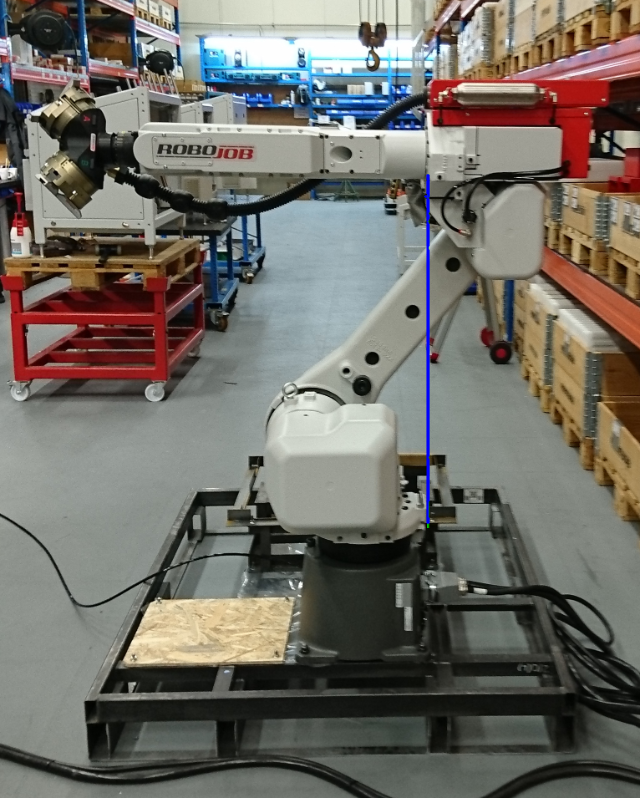
Mit dem ersten Schritt wird der Robot an die richtige Position gebracht, um die Hebegurte anzubringen.Bei diesem Beispiel beginnen wir bei der Null-Position mit dem Programm A9_ZERO.Das Programm bewegt den Robot auf eine Position, wo alle Joint Werte null sind.Der Robotarm ist dann waagerecht ausgerichtet.

Den Robot mit J2 bewegen, bis er die in der nachstehenden Abbildung gezeigte Position erreicht hat.Die Vorderseite von Joint 3 befindet sich an derselben Stelle wie die Rückseite von Joint 1.Das wird durch die grüne Linie angezeigt.
| Hinweis |
Es ist nicht immer möglich, die Null-Position zu erreichen.Der Robot kann aber manuell an eine gute Position für das Anbringen der Hebegurte gebracht werden.
2.5.2. Hebegurte anbringen
Den Hebegurt an den Hebeösen anbringen.

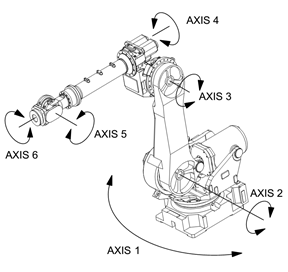
Der Hebegurt wird zwischen Achse 2 und Achse 4 angebracht.

Um zu verhindern, dass der Robot beim Anheben kippt, wird eine zusätzliche Sicherung am zu Achse 4 führenden Hebegurt angebracht.

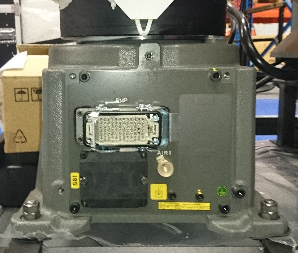
2.5.3. Kabel und Druckluftleitung abnehmen
Bevor der Robot angehoben wird, müssen das zum Controller führende Kabel, die Druckluftversorgung und das Erdkabel abgenommen werden.Alle weiteren Kabel vom Robot abnehmen, die diesen mit der Basis verbinden.Die Akkus im Robot lassen, und auch die am Robotarm angebrachten Kabel.Die Akkus versorgen die Encoder an den Motoren mit Strom, so dass der Robot immer seine Position kennt.
2.5.4. Robot aus der Robot-Halterung nehmen
Die Muttern von den Bolzen der Robot-Halterung abnehmen.Den Robot vorsichtig aus seiner Halterung herausheben.Den Robot auf einer Palette zum Transport verschrauben.

2.6. Robot für Transport vorbereiten
Wenn der Robot sich auf einer Grundplatte befindet, kann die gesamte Installation bewegt werden, ohne dass der Robot aus seiner Halterung genommen werden muss.Wenn der Robot sich nicht auf einer Grundplatte befindet, muss der Robot an einer Palette zum Transport verschraubt werden.

In beiden Fällen muss der Robot in seine Transportstellung ausgerichtet werden.Wenn das Kabel zum Controller abgenommen wurde, muss es wieder angebracht werden, um den Robot bewegen zu können.Abhängig vom Greiferkörper entweder das Programm A9_TRANSP_AB oder das Programm A9_TRANSP_ABC benutzen, um den Robot in seine Transportposition zu bewegen.Wenn das Programm nicht benutzt werden kann oder wenn die Position nicht erreichbar ist, muss der Robot auf eine ähnliche Position bewegt werden, damit er sicher transportiert werden kann.
Den Robot in eine Luftpolsterfolie und in Plastik einwickeln, damit er beim Transport geschützt ist.

| Hinweis |
Keine weiteren Teile des Robots abbauen.Die Akkus immer im Robot lassen.Die Motoren oder die Encoder nicht vom Robot trennen.
| Hinweis |
Den Robot nur mit dem Controller bewegen.Nicht versuchen, den Robot manuell zu bewegen.
3. So erhalten Sie weitere Hilfe
Zögern Sie nicht, uns zu kontaktieren, wenn Sie zusätzliche Unterstützung benötigen, die über die in der RoboJob Service Knowledge Base bereitgestellten Dokumente hinausgeht.
Sie können die RoboJob-Serviceabteilung auf folgende Weise kontaktieren:
-
Help Center: service.robojob.eu
-
E-Mail: service@robojob.eu
-
Telefon: +49 7134 9199 543
Wir bitten Sie, uns folgende Informationen zur Verfügung zu stellen:
-
Seriennummer xx-xx-xxx
-
Beschreibung des mangelhaften oder defekten Teils
-
Genauer Fehlercode oder Nachricht
-
Was hat der Roboter getan
-
Was sollte der Roboter tun
-
Bilder oder Videos
Sie können diese Informationen per E-Mail an uns senden.Um große Dateien zu senden, können Sie einen Dateiübertragungsdienst wie WeTransfer verwenden: robojob.wetransfer.com.
Eine automatische Bestätigung wird nach Erhalt Ihrer Mail gesendet.