Greiferkabel abziehen und Sensoren in der Software deaktivieren
|
Die Sensoren im Greifer funktionieren nicht mehr, und das Greiferkabel muss abgezogen werden, um einem Kurzschluss im Roboter vorzubeugen.Außerdem sind einige Korrekturen zum Deaktivieren der Sensoren durch die Software erforderlich. |
1. Verwenden Sie folgende Werkzeuge
|
|
|


2. Vorgehensweise
2.1. Kabel abziehen
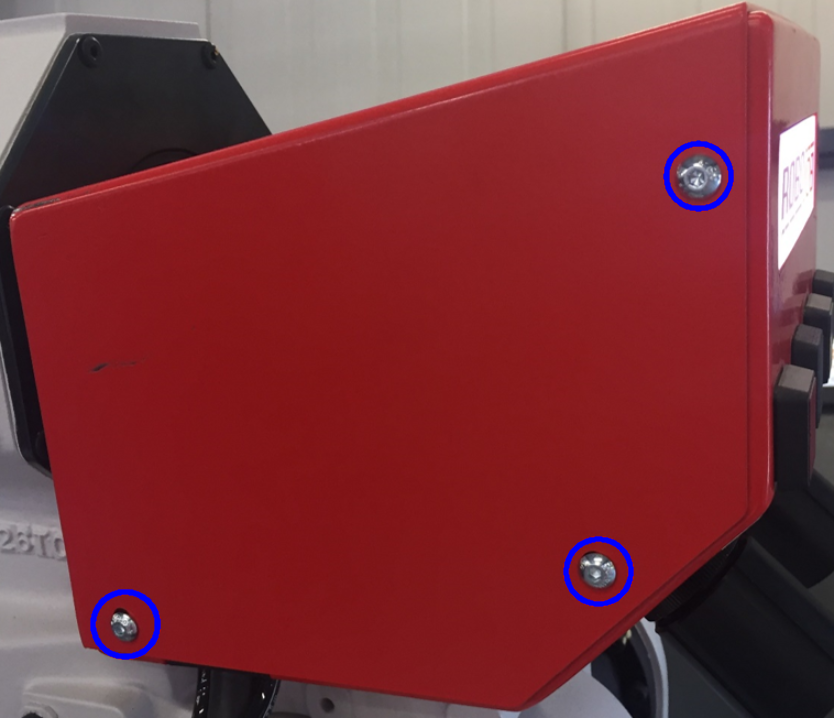
2.1.1. Pneubox-Abdeckung abnehmen
Die Abdeckung der Pneubox muss abgenommen werden, damit das Greiferkabel zugänglich ist.Dazu werden die Schrauben auf beiden Seiten der Pneubox herausgedreht.
2.1.2. Kabel ausstecken
Nach Entfernen der Abdeckung sind die Platinen sichtbar.Der Stecker des Greiferkabels befindet sich in der Pneubox in der linken oberen Ecke und ist mit Gripper (Greifer) beschriftet.
Bei den älteren Versionen haben alle 6 Leitungen dieselbe Farbe und sind nummeriert.Die linken Zahlen entsprechen dem Stecker und die rechten Zahlen dem Kabel.Bei den neuen Versionen sind die Leitungen farbcodiert.Die linken Zahlen entsprechen dem Stecker, die Farben sind über den ausgezogenen Leitungen angegeben.
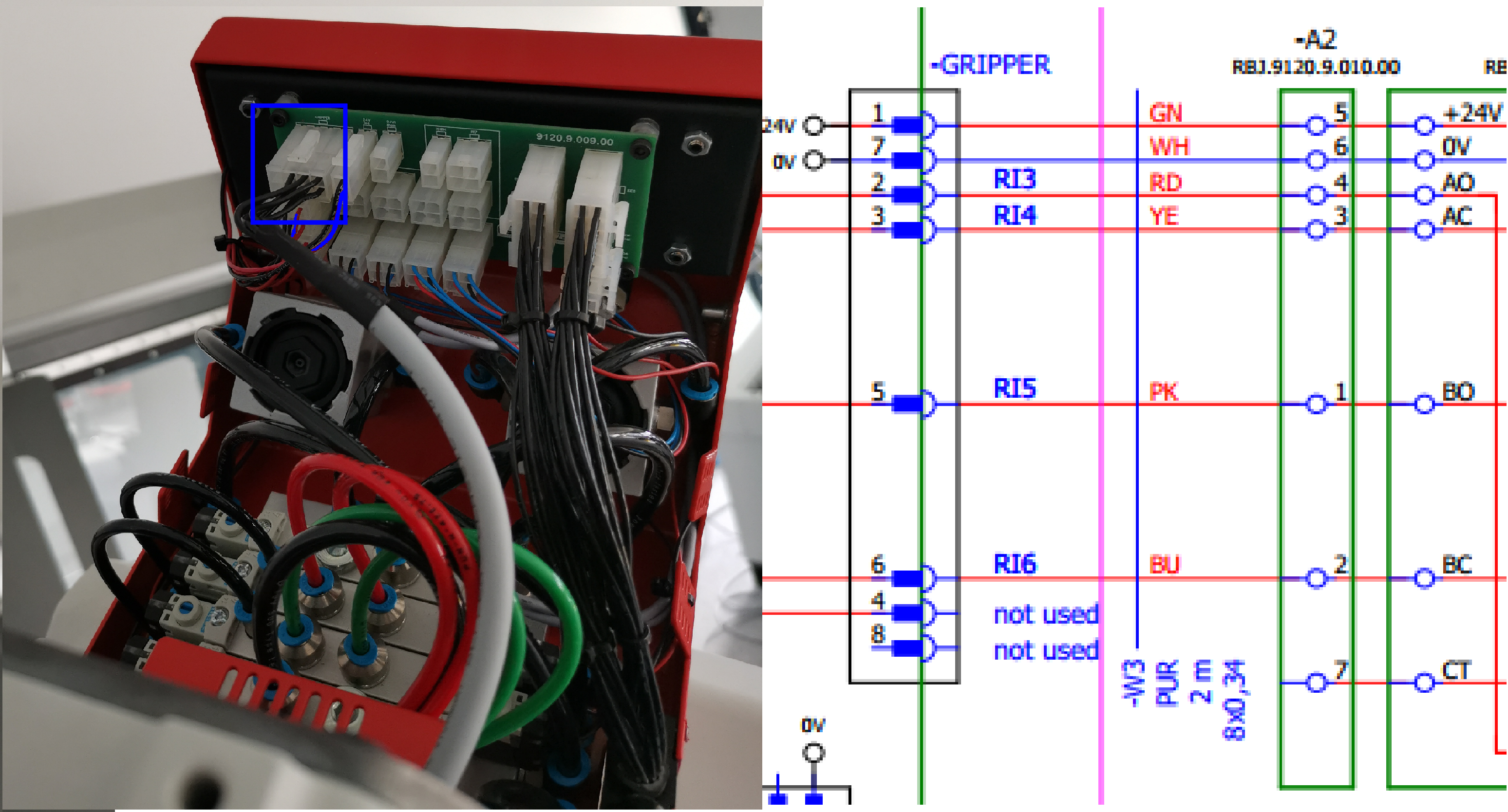
Jetzt kann das Greiferkabel aus der Platine gezogen werden.

2.1.3. Pneubox-Abdeckung aufsetzen
Nach dem Ausstecken des Kabels kann die Abdeckung der Pneubox wieder aufgesetzt werden.Dazu werden die Schrauben wieder festgezogen.
2.2. Sensoren in der Software deaktivieren
-
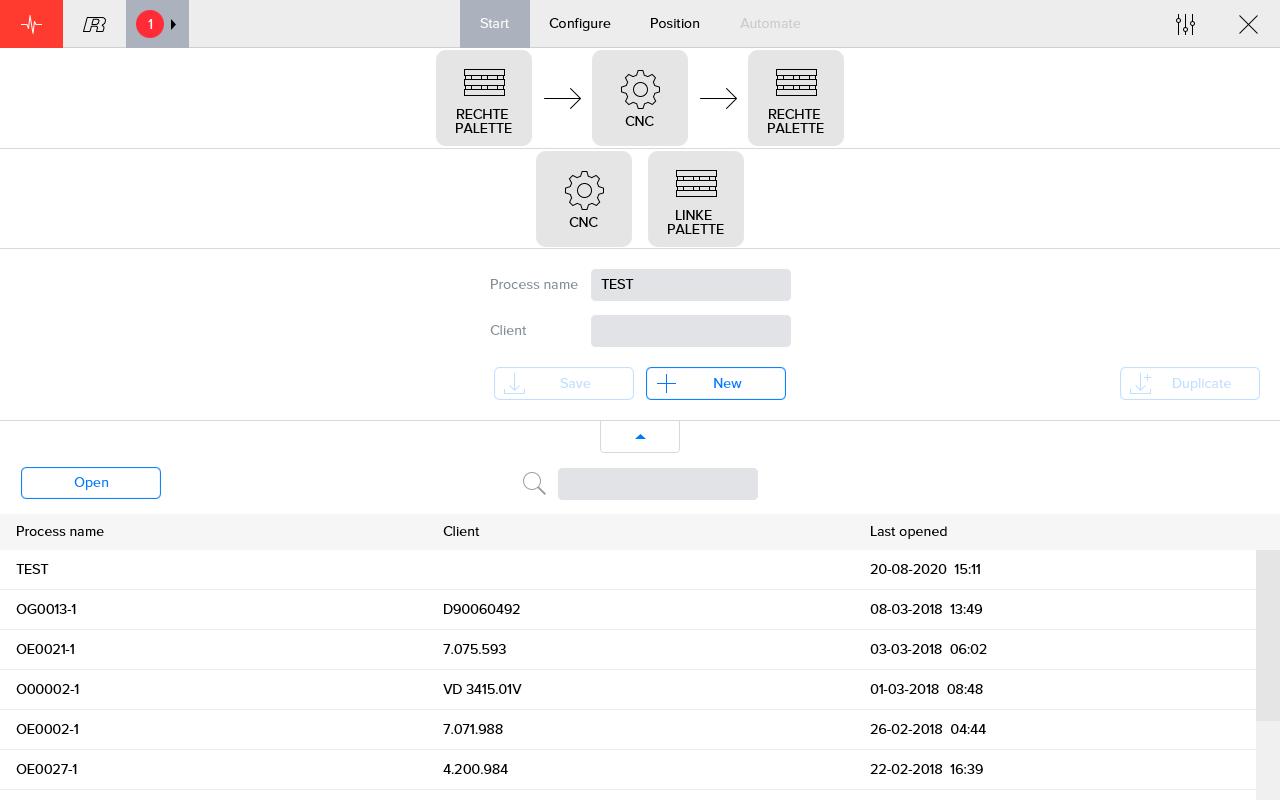
Multi-Assist Software öffnen.
-
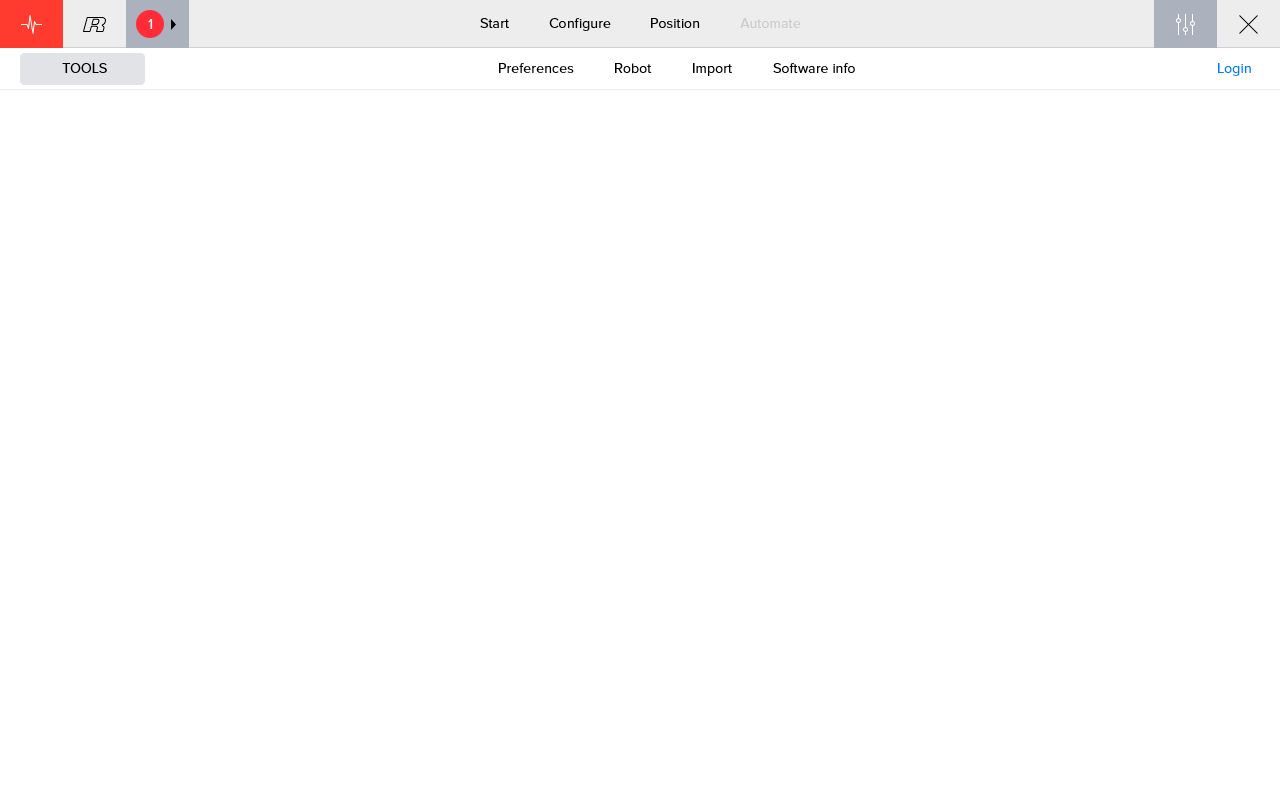
Durch Drücken der Taste Einstellungen in der oberen rechten Ecke das Menü Einstellungen öffnen.
-
Menü Präferenzen öffnen.
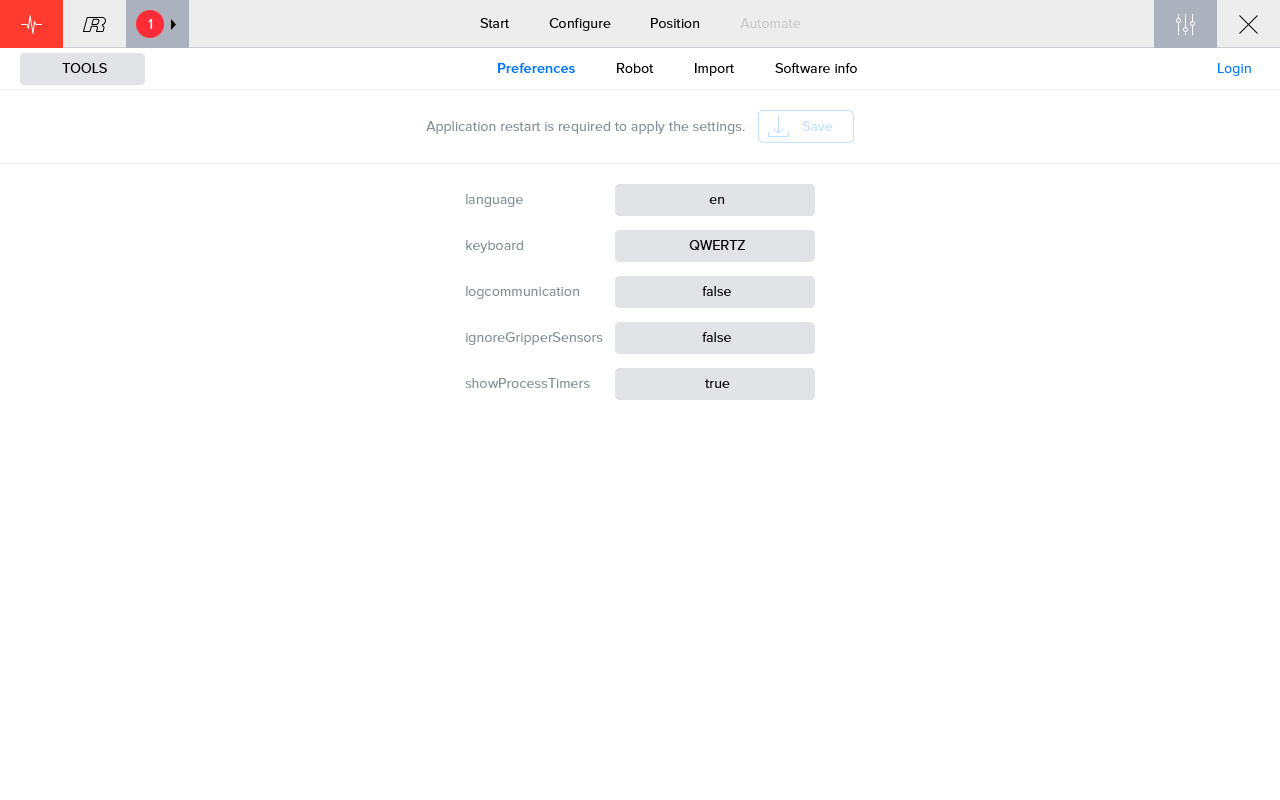
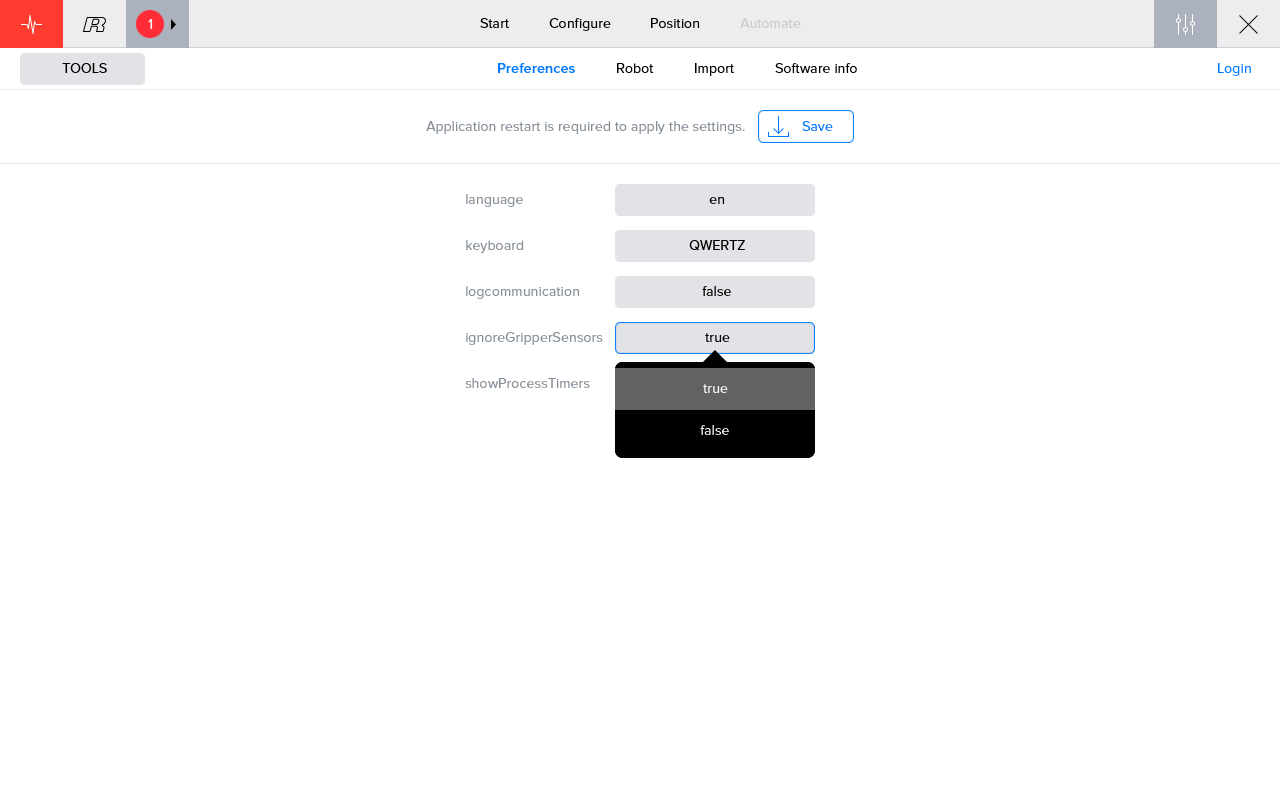
-
Ändern Sie den Parameter IgnoreGripperSensor (Greifersensor ignorieren) auf True.
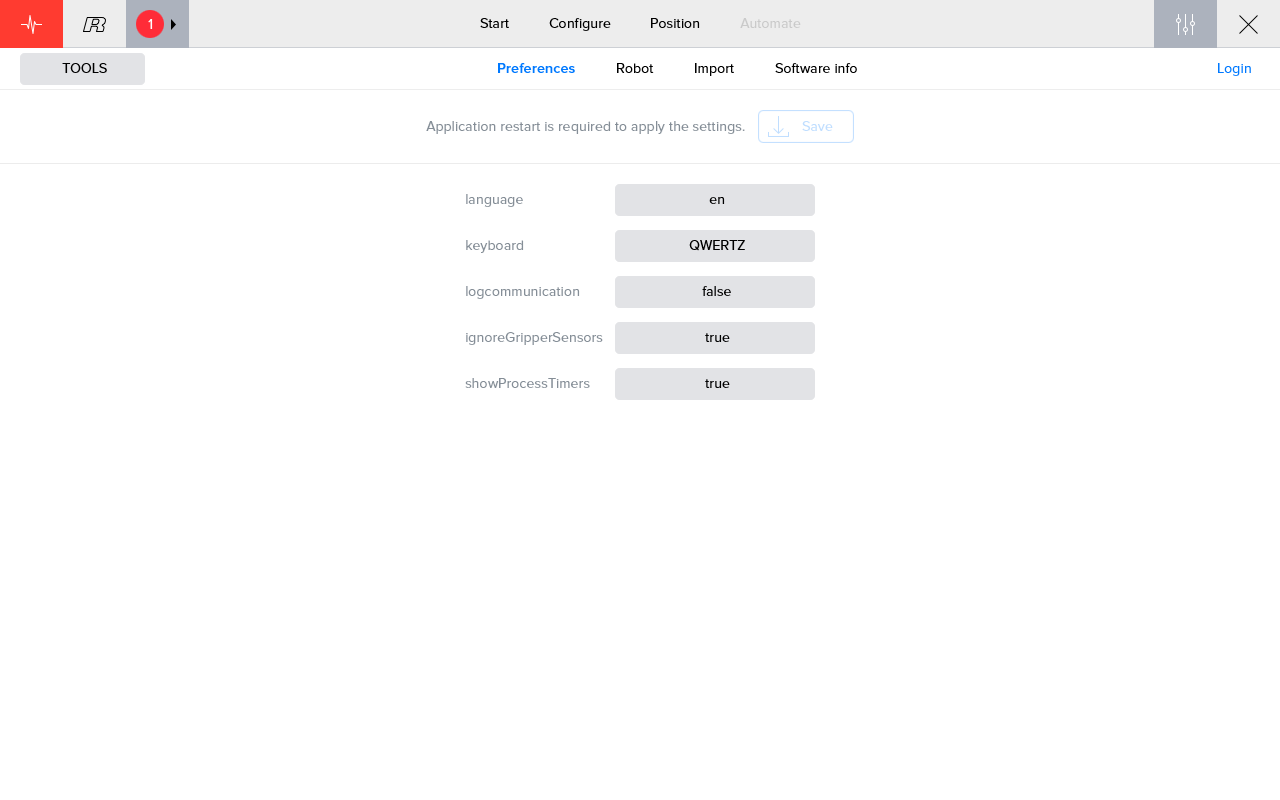
-
Speichern Sie die Änderungen mit der Schaltfläche Save (Speichern) in der Bildschirmmitte.
3. So erhalten Sie weitere Hilfe
Zögern Sie nicht, uns zu kontaktieren, wenn Sie zusätzliche Unterstützung benötigen, die über die in der RoboJob Service Knowledge Base bereitgestellten Dokumente hinausgeht.
Sie können die RoboJob-Serviceabteilung auf folgende Weise kontaktieren:
-
Help Center: service.robojob.eu
-
E-Mail: service@robojob.eu
-
Telefon: +49 7134 9199 543
Wir bitten Sie, uns folgende Informationen zur Verfügung zu stellen:
-
Seriennummer xx-xx-xxx
-
Beschreibung des mangelhaften oder defekten Teils
-
Genauer Fehlercode oder Nachricht
-
Was hat der Roboter getan
-
Was sollte der Roboter tun
-
Bilder oder Videos
Sie können diese Informationen per E-Mail an uns senden.Um große Dateien zu senden, können Sie einen Dateiübertragungsdienst wie WeTransfer verwenden: robojob.wetransfer.com.
Eine automatische Bestätigung wird nach Erhalt Ihrer Mail gesendet.