Schranksensor kalibrieren (SRVO-406 DCS SSO SVOFF input 1,1)
|
Bei Alarmmeldung „SRVO-406 DCS SSO SVOFF input 1,1“ des Roboters.Die Seitenwand muss daraufhin überprüft werden, ob die Tür richtig geschlossen ist. Falls ja, muss der Sensor im Schaltschrank kalibriert werden. |
1. Verwenden Sie folgende Werkzeuge
|
|
|
|



2. Vorgehensweise
2.1. Sicheren E/A-Status Öffnen
-
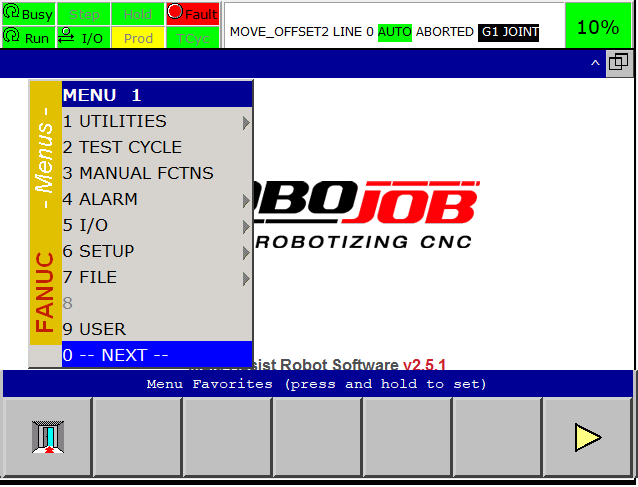
Drücken Sie die MENU-Taste und gehen Sie zu 0 NEXT (Weiter).
-
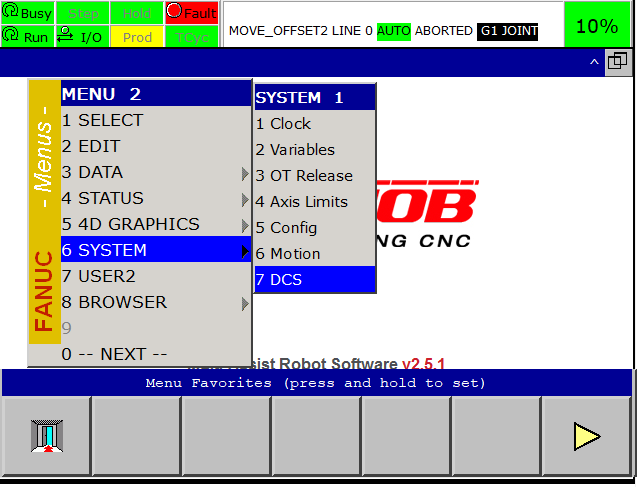
Gehen Sie zu 6 SYSTEM und dann zu 7 DCS.
-
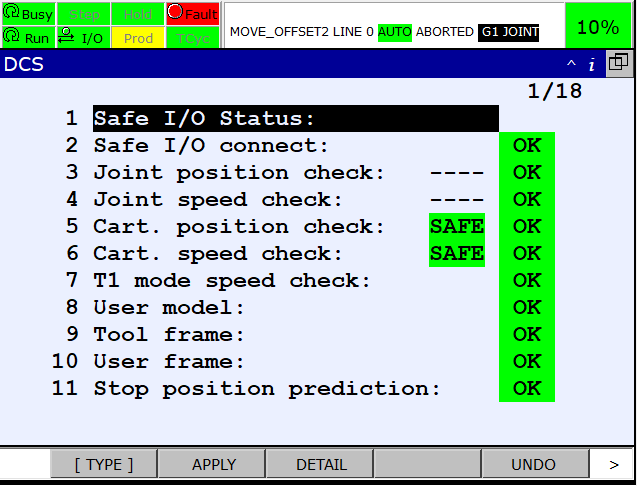
Gehen Sie zu 1 Safe I/O Status (Sicherer E/A-Status), und drücken Sie die DETAIL-Taste.
-
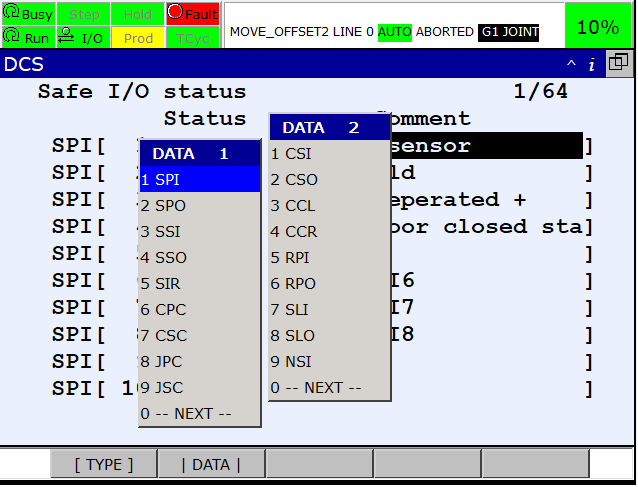
Vergewissern Sie sich, dass die Registerkarte SPI geöffnet ist.
2.2. Seitenwand überprüfen
-
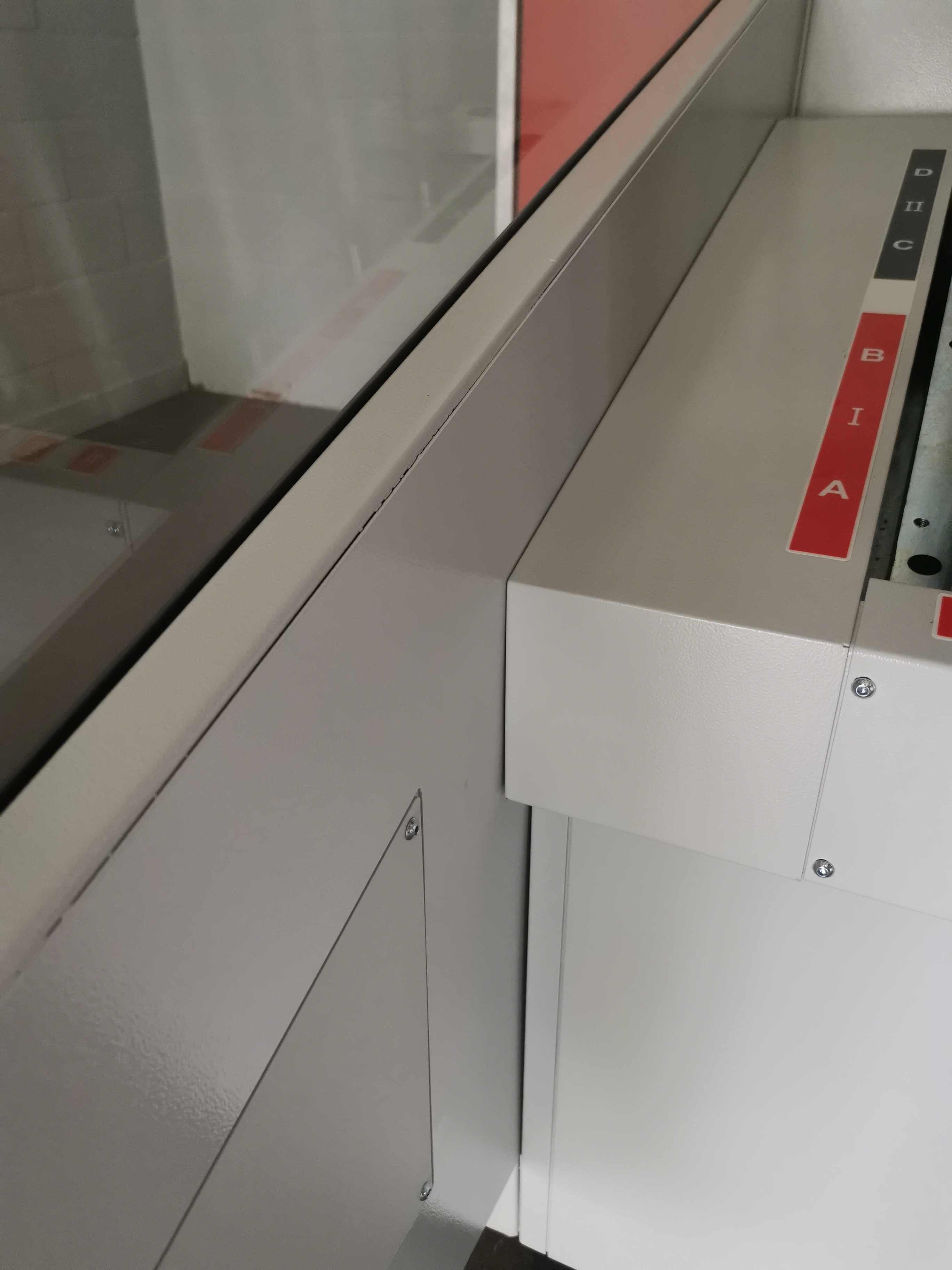
Überprüfen Sie, ob die Seitenwand richtig geschlossen ist (falls nicht, schließen Sie die Tür).

-
Ziehen Sie die Seitenwand zum Stapler, um die Tür zu schließen.
-
Wenn die Seitenwand geschlossen ist, verriegeln Sie die Tür mit einem Innensechskantschlüssel.Die festzuziehende Schraube befindet sich unter der Tischplatte des Staplers.
-
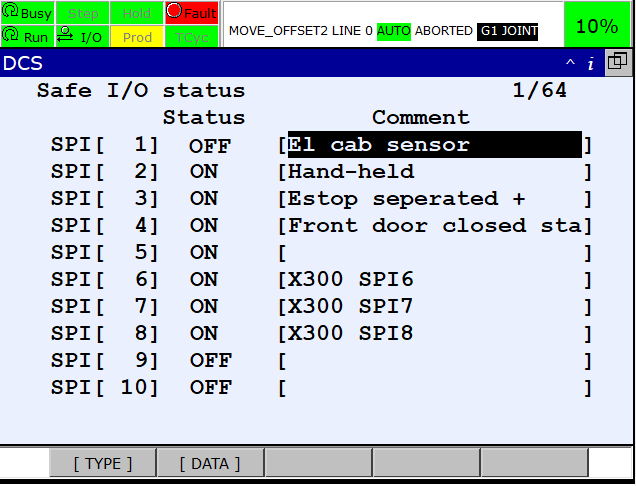
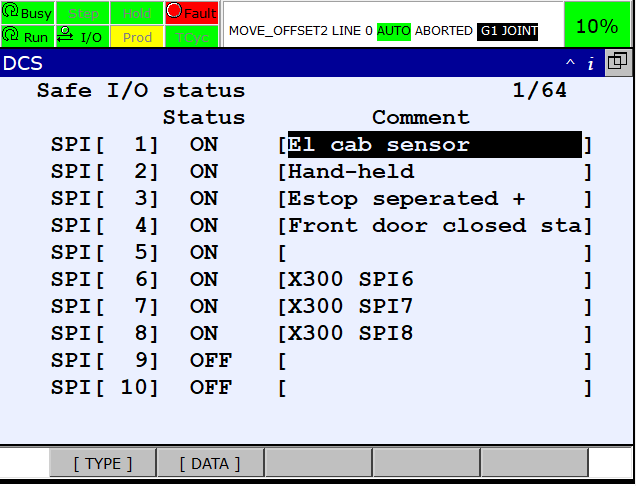
Wenn die Tür richtig geschlossen ist, muss der Status des Parameters SPI[1] auf ON stehen.Ist dies nicht der Fall (Status = OFF), muss der Sensor im Schaltschrank kalibriert werden.
Wenn der Status auf ON steht, müssen einige Tests vorgenommen werden, um zu prüfen, ob der Sensor richtig kalibriert ist.
2.3. Sensor kalibrieren
2.3.1. SPI[1] ist OFF
Steht der Status des Parameters SPI[1] auf OFF, muss der Sensor kalibriert werden.Dazu ist wie folgt vorzugehen.
-
Öffnen Sie die Tür erneut, indem Sie die Schraube lösen und die Seitenwand aufziehen.
-
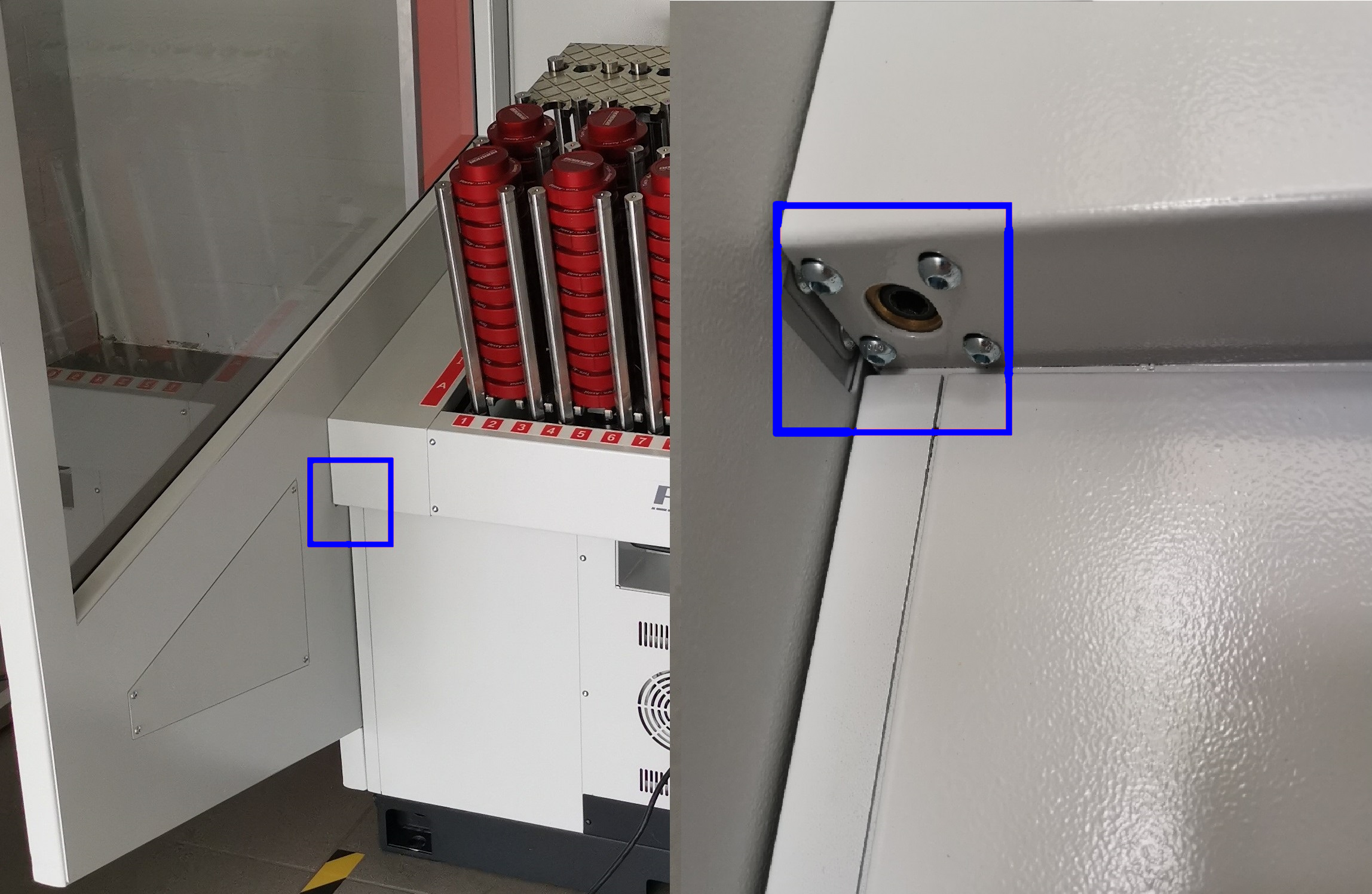
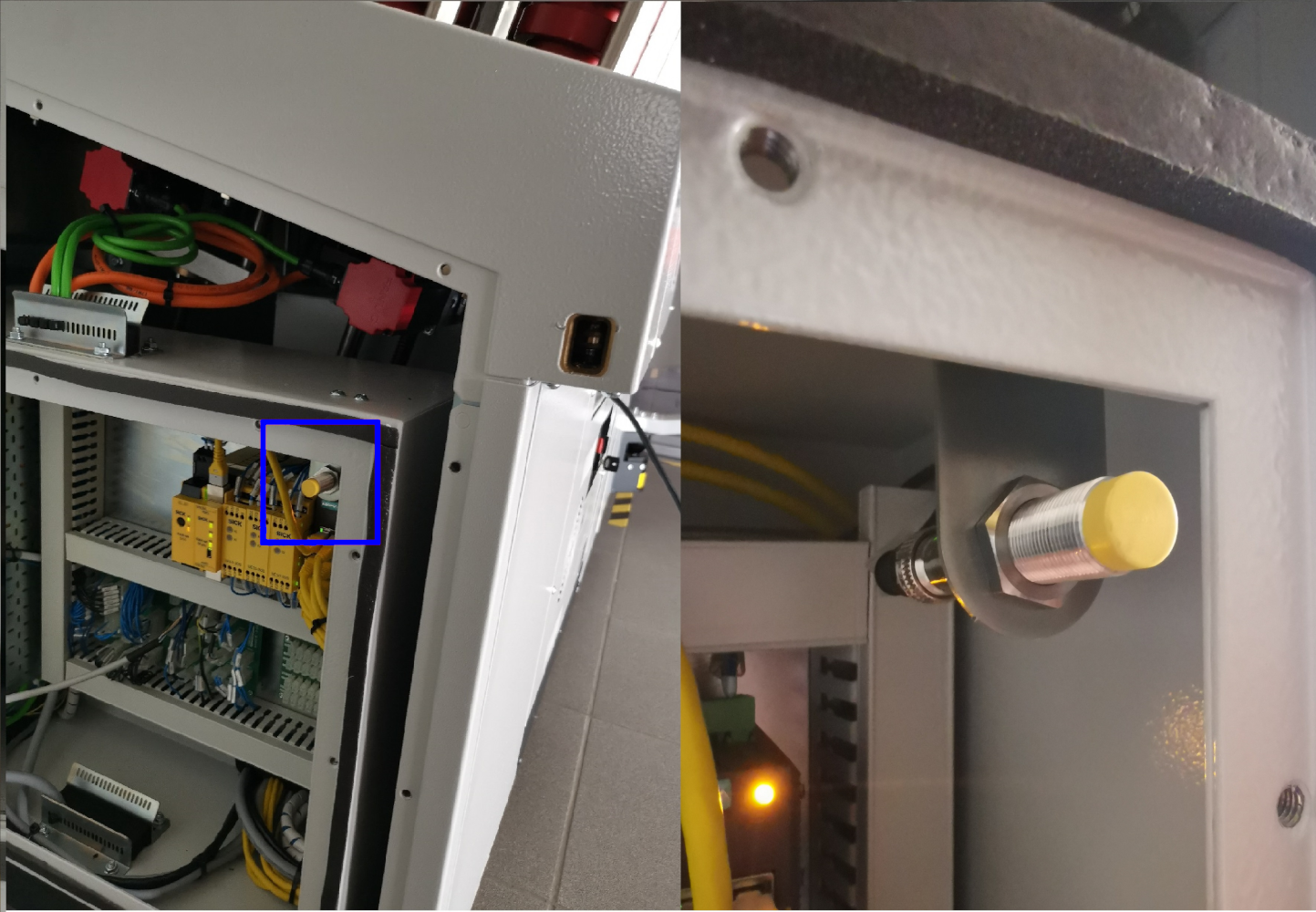
Rücken Sie den Sensor weiter nach außen.Lösen Sie dazu die Muttern (1 vor und 1 hinter der Metallplatte), verrücken Sie den Sensor, und ziehen Sie die Muttern wieder fest.
-
Schließen Sie die Tür erneut, und prüfen Sie, dass die Seitenwand beim Schließen nicht an den Sensor stößt.Sollte dies der Fall sein, rücken Sie den Sensor ein wenig nach innen.
-
Wenn die Tür geschlossen und verriegelt ist, prüfen Sie erneut die Parameter.Steht der Status immer noch auf OFF, rücken Sie den Sensor wieder nach außen.Wenn der Status auf ON steht, müssen einige Tests vorgenommen werden, um zu prüfen, ob der Sensor richtig kalibriert ist.
2.3.2. SPI[1] ist ON
Wenn der Status des Parameters SPI[1] auf ON steht, müssen einige Tests vorgenommen werden, um zu prüfen, ob der Sensor richtig kalibriert ist.
-
Drücken Sie gegen die Kante der Seitenwand, und prüfen Sie, ob der Status auf ON bleibt.Falls nicht, muss der Sensor nach innen gerückt werden, da sich die Wand zu nah am Sensor bewegt.

-
Ziehen Sie an der Kante der Seitenwand, und prüfen Sie, ob der Status auf ON bleibt.Falls nicht, muss der Sensor nach außen gerückt werden, da sich die Wand zu weit vom Sensor bewegt.

|
Falls der Sensor aufgrund der gerade vorgenommenen Tests verrückt werden muss, müssen diese Tests wiederholt werden, bis der Sensor in der richtigen Position steht. |
3. So erhalten Sie weitere Hilfe
Zögern Sie nicht, uns zu kontaktieren, wenn Sie zusätzliche Unterstützung benötigen, die über die in der RoboJob Service Knowledge Base bereitgestellten Dokumente hinausgeht.
Sie können die RoboJob-Serviceabteilung auf folgende Weise kontaktieren:
-
Help Center: service.robojob.eu
-
E-Mail: service@robojob.eu
-
Telefon: +49 7134 9199 543
Wir bitten Sie, uns folgende Informationen zur Verfügung zu stellen:
-
Seriennummer xx-xx-xxx
-
Beschreibung des mangelhaften oder defekten Teils
-
Genauer Fehlercode oder Nachricht
-
Was hat der Roboter getan
-
Was sollte der Roboter tun
-
Bilder oder Videos
Sie können diese Informationen per E-Mail an uns senden.Um große Dateien zu senden, können Sie einen Dateiübertragungsdienst wie WeTransfer verwenden: robojob.wetransfer.com.
Eine automatische Bestätigung wird nach Erhalt Ihrer Mail gesendet.