Greifer-Sensoren nachtstellen
|
Die Sensoren müssen nachgestellt werden, weil die Werkstück-Erkennung in den Robotgreifern nicht richtig funktioniert.Dem nächsten Vorgang folgen, um die Greifer nachzustellen. |
1. Verwenden Sie folgende Werkzeuge
|
|
|


2. Vorgehensweise
2.1. Prüfen, welche Sensoren zur Erkennung von offenen und geschlossenen Greifern verwendet werden
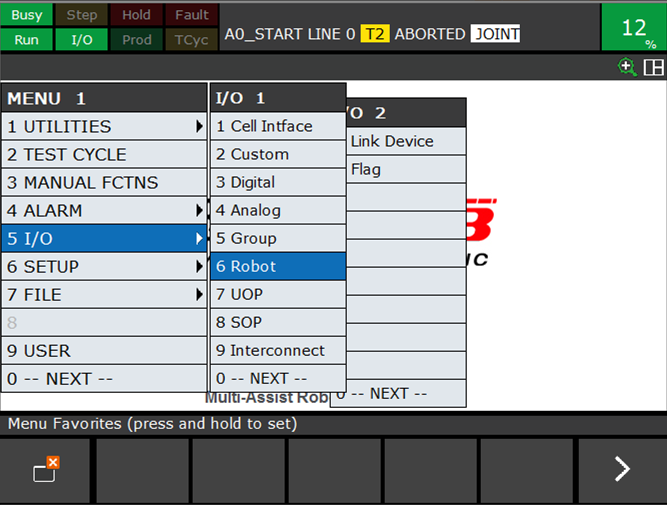
Den Robot Eingabe-Bildschirm am Teach Pendant mit einem Klick auf Menu öffnen, dann 5 I/O auswählen, 6 Robot aufrufen und ENTER betätigen.
Mit einem Klick auf F3 IN/OUT zu den Eingabe-Signalen des Robot navigieren.
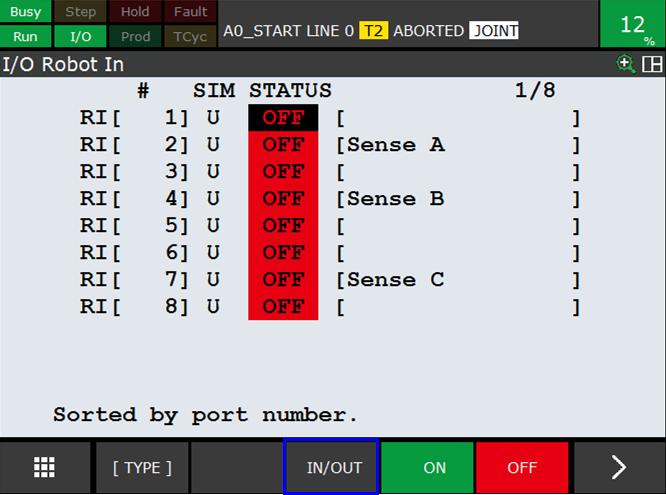
Ein Metallstück vor den Sensor halten und am Teach Pendant prüfen, welches Signal aktiviert ist.Auf diese Weise kann ermittelt werden, welcher Sensor genutzt wird, um zu erkennen, dass der Greifer geöffnet ist, und welcher Sensor genutzt wird, um zu erkennen, dass der Greifer geschlossen ist.So kann man auch überprüfen, ob der Sensor richtig funktioniert und das Signal an den Robot überträgt.

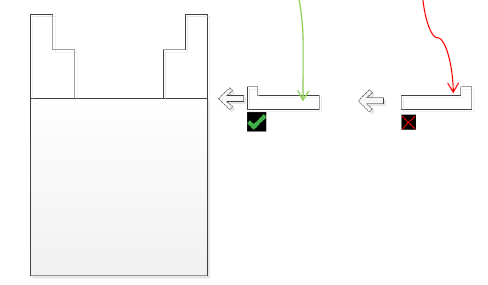
2.2. Sensoren für die Erkennung festlegen, dass der Greifer geöffnet ist
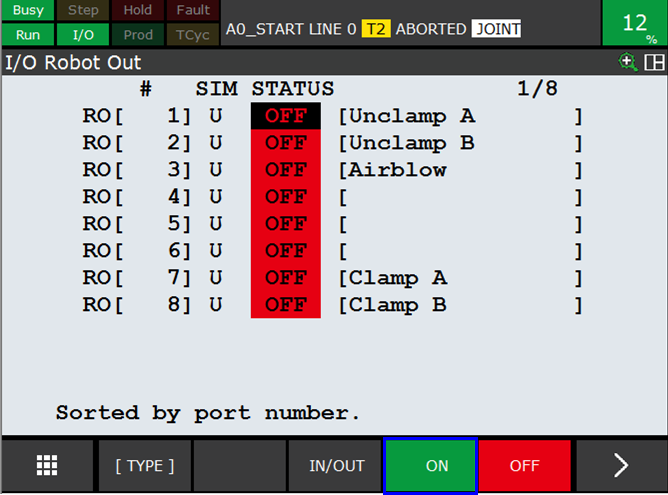
Die Greifer öffnen.Am Bildschirm des Teach Pendant 'Robot Ausgang - I/O Robot Out' durch Klicken auf F3 IN/OUT aufrufen.Dann den Greifer mit einem Klick auf F4 ON öffnen.Die Ausgänge so einstellen, dass die Greifer geöffnet sind.
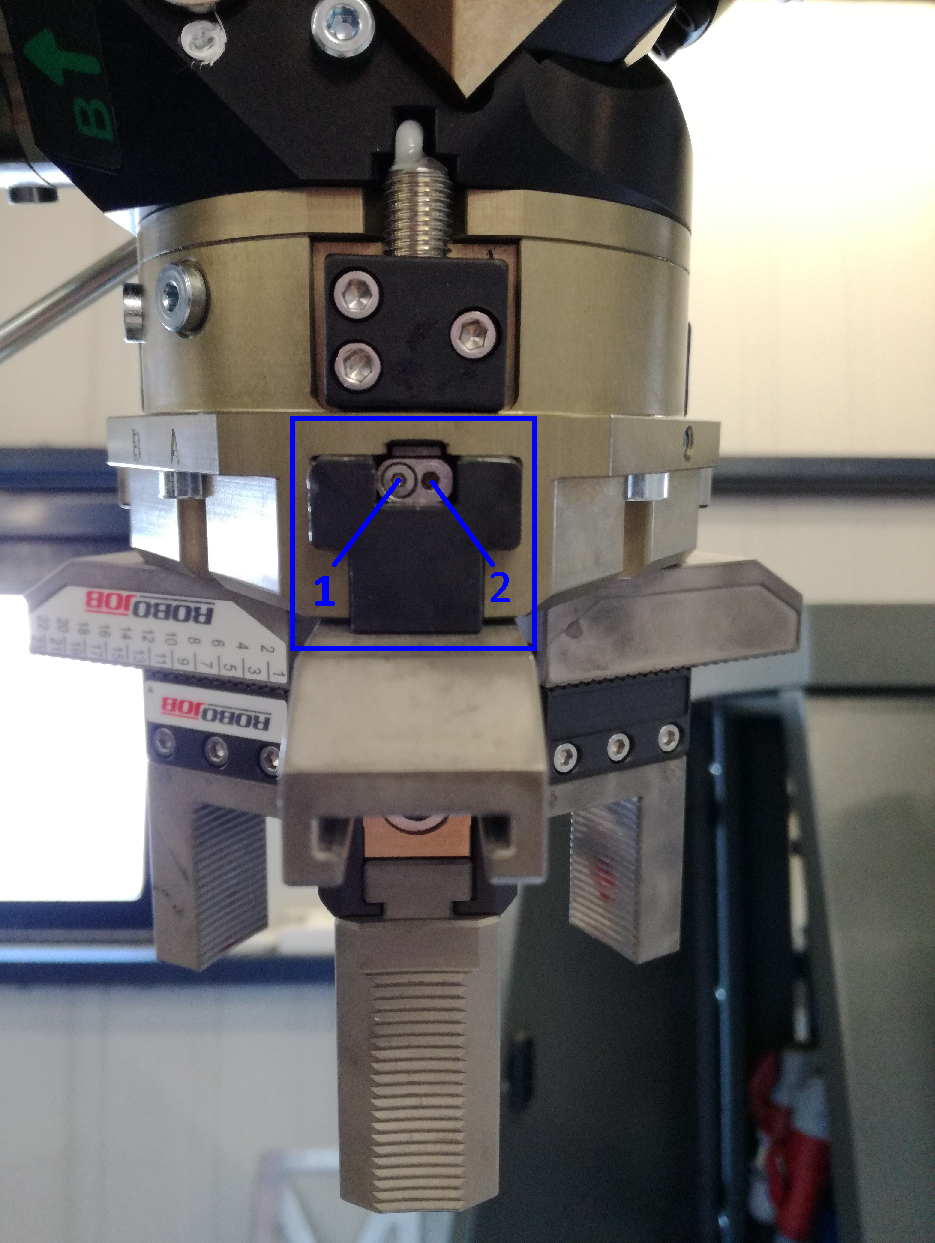
Dazu zuerst den linken Bolzen lösen (1), dann die Metall-Erkennungsplatte von der Innenseite auf die Außenseite (2) schrauben, so dass zuerst die Erkennungsplatte komplett eingeschraubt ist.Jetzt die Platte langsam zurückschrauben, bis die LED-Anzeige erlischt.Der Sensor ist eingestellt, wenn die LED-Anzeige erlischt.Die Erkennungsplatte in dieser Stellung fixieren.
|
Unbedingt darauf achten, die Erkennungsplatte nicht weiter als nötig nach außen zu schrauben. |
Wenn der Sensor am Robot noch nicht eingestellt ist, müssen Sie das Erkennungselement am Greifer montieren.Das Element zur Metallerkennung wie in der Abbildung gezeigt im Greifer befestigen.
|
Unbedingt darauf achten, dass das Metallelement in die richtige Richtung montiert ist. |
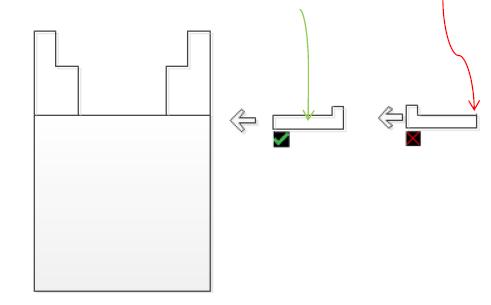
2.3. Sensoren für die Erkennung festlegen, dass der Greifer geschlossen ist
Die Greifer schließen.Am Bildschirm des Teach Pendant 'Robot Ausgang - I/O Robot Out' durch Klicken auf F3 IN/OUT aufrufen.Dann den Greifer mit einem Klick auf F4 ON schließen.Die Ausgänge so einstellen, dass die rechten Greifer geschlossen sind.
Dazu die Metall-Erkennungsplatte von der Außenseite auf die Innenseite schrauben, so dass zuerst die Erkennungsplatte komplett ausgeschraubt ist.Jetzt die Platte langsam zurück nach innen schrauben, bis die LED-Anzeige erlischt.Der Sensor ist eingestellt, wenn die LED-Anzeige erlischt.Die Erkennungsplatte in dieser Stellung fixieren.
|
Unbedingt darauf achten, die Erkennungsplatte nicht weiter als nötig nach innen zu schrauben. |
Wenn der Sensor am Robot noch nicht eingestellt ist, müssen Sie das Erkennungselement selbst am Greifer montieren.Das Element zur Metallerkennung wie in der Abbildung gezeigt im Greifer befestigen.
|
Unbedingt darauf achten, dass das Metallelement in die richtige Richtung montiert ist.Die Richtung ist der Richtung entgegengesetzt, in der die Sensoren einen offenen Greifer erkennen. |
3. So erhalten Sie weitere Hilfe
Zögern Sie nicht, uns zu kontaktieren, wenn Sie zusätzliche Unterstützung benötigen, die über die in der RoboJob Service Knowledge Base bereitgestellten Dokumente hinausgeht.
Sie können die RoboJob-Serviceabteilung auf folgende Weise kontaktieren:
-
Help Center: service.robojob.eu
-
E-Mail: service@robojob.eu
-
Telefon: +49 7134 9199 543
Wir bitten Sie, uns folgende Informationen zur Verfügung zu stellen:
-
Seriennummer xx-xx-xxx
-
Beschreibung des mangelhaften oder defekten Teils
-
Genauer Fehlercode oder Nachricht
-
Was hat der Roboter getan
-
Was sollte der Roboter tun
-
Bilder oder Videos
Sie können diese Informationen per E-Mail an uns senden.Um große Dateien zu senden, können Sie einen Dateiübertragungsdienst wie WeTransfer verwenden: robojob.wetransfer.com.
Eine automatische Bestätigung wird nach Erhalt Ihrer Mail gesendet.