TA Tischhöhe kalibrieren - Multi-Assist (i. A. 1 Tisch)
|
Dieses Dokument beschreibt, wie die Staplertischhöhe kalibriert wird.Nach Änderungen an der Mechanik oder Elektrik des Tischsystems muss der Tisch neu kalibriert werden. |
1. Verwenden Sie folgende Werkzeuge
|
|
|
|


2. Vorgehensweise
2.1. Tischhöhe justieren und messen
Die Höhe des Tisches dicht an den Haltestangen von der Oberseite der Haltestützen aus messen.Alle anderen Stützen entfernen, und dieselbe Stütze für alle Messungen verwenden, um Messfehler zu vermeiden.

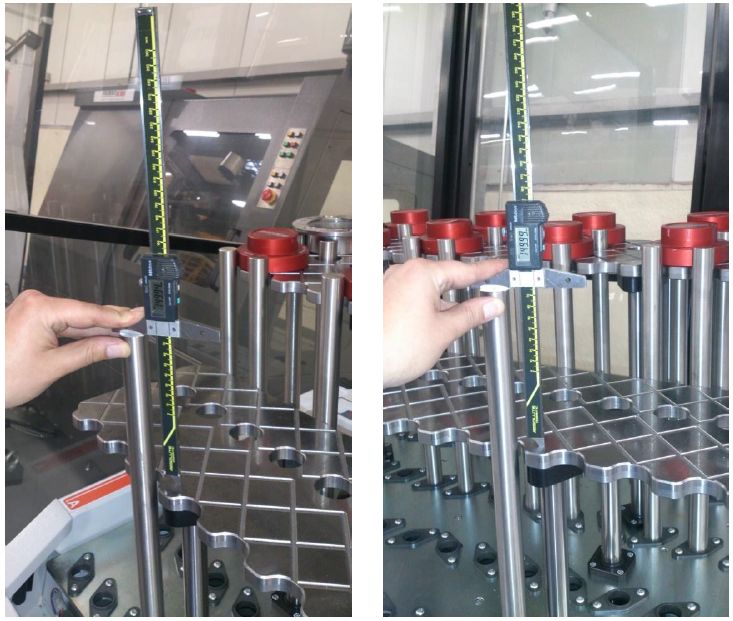
Die Höhe der Haltestangen so einstellen, dass der Tisch sich parallel zur oberen Platte des Staplers befindet.Die Tischhöhendifferenz zwischen den Messungen (Parallelfehler) muss weniger als 0,1 mm betragen.
2.2. Einstellungsseite aufrufen
Den Stapler einschalten.Den IPC einschalten und die Multi-Assist Software starten.Konfigurationsseite aufrufen.
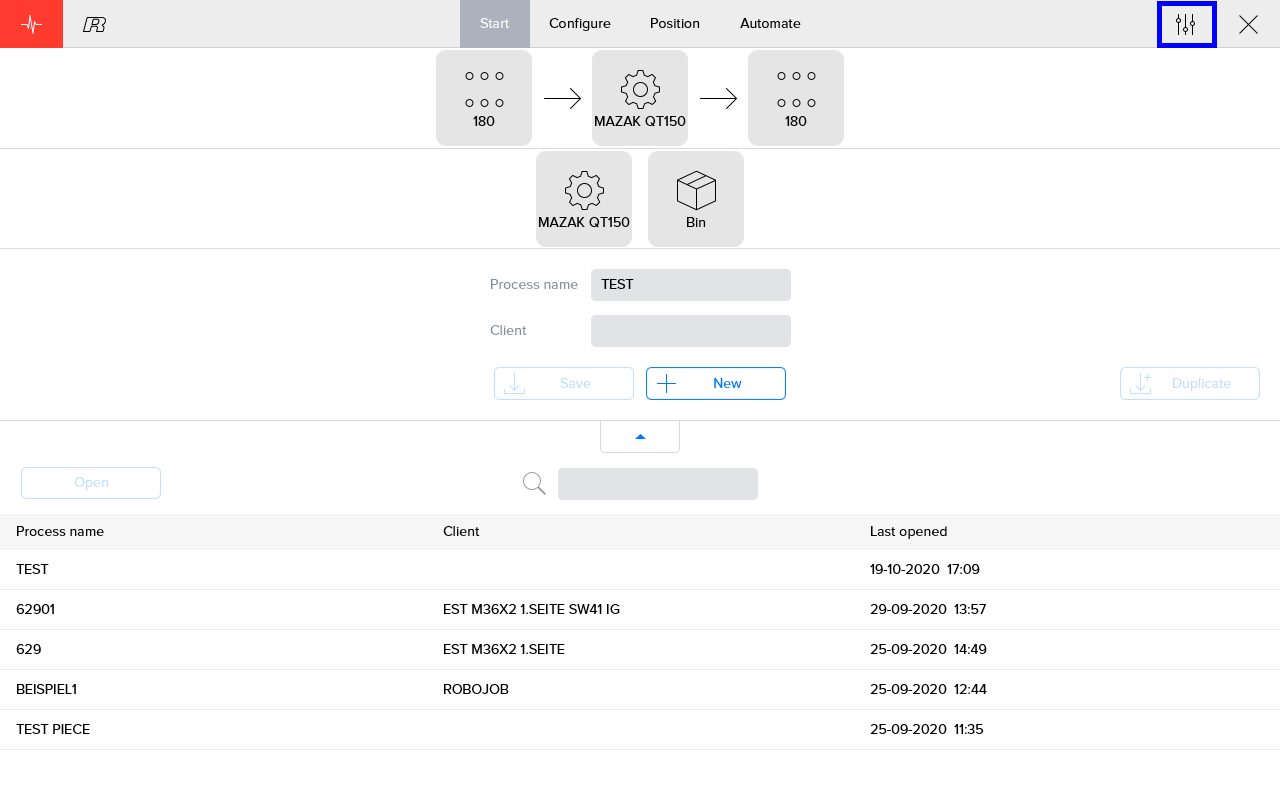
Sich mit dem von RoboJob zugesandten Passwort anmelden.
|
Während die Konfiguration entsperrt ist, dürfen ausschließlich die im Dokument gezeigten Einstellungen geändert werden.Das Passwort darf nur für die in diesem Dokument beschriebenen Zwecke verwendet werden. |

2.3. Tisch kalibrieren
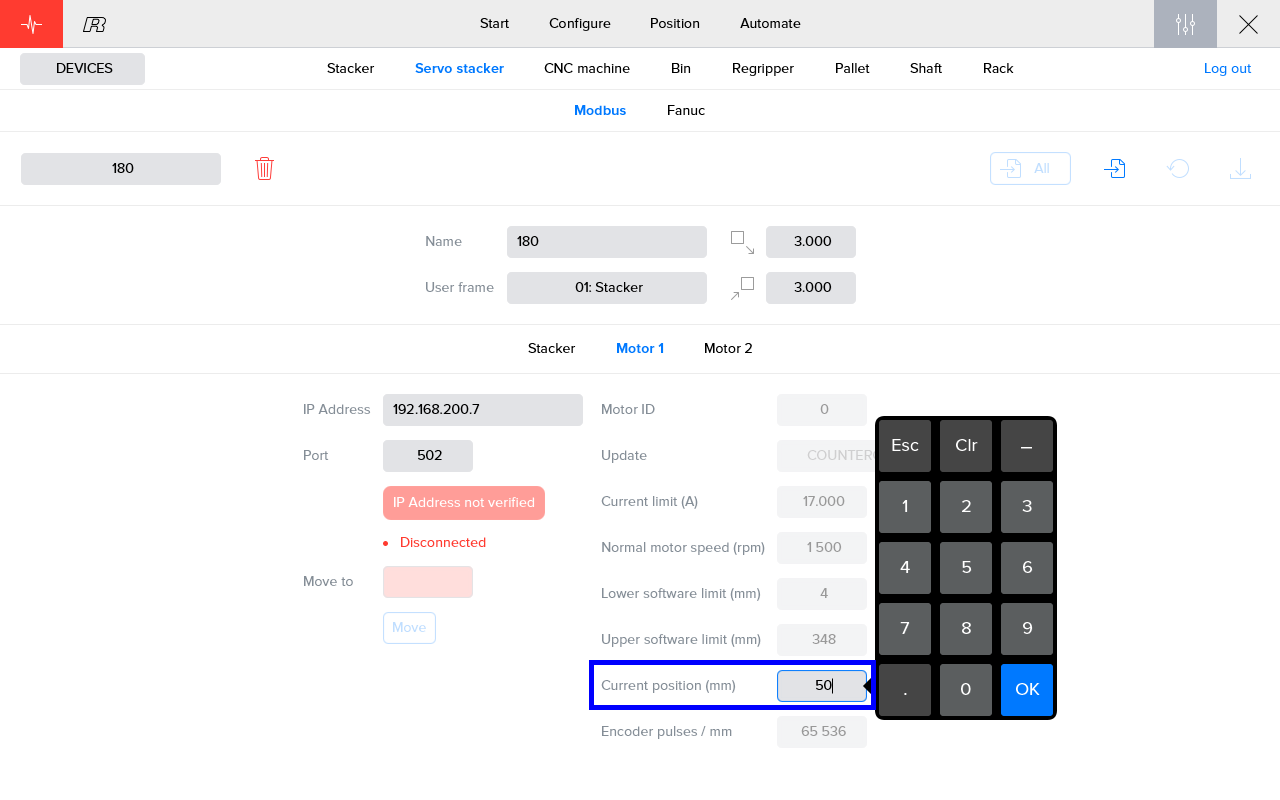
Rufen Sie die Registerkarte Geräte in der Software auf.Wählen Sie Servotisch und dann Modbus aus.Wählen Sie den zu auszurichten Tisch.Motor 1 bewegt den vorderen Tisch, Motor 2 den hinteren Tisch.
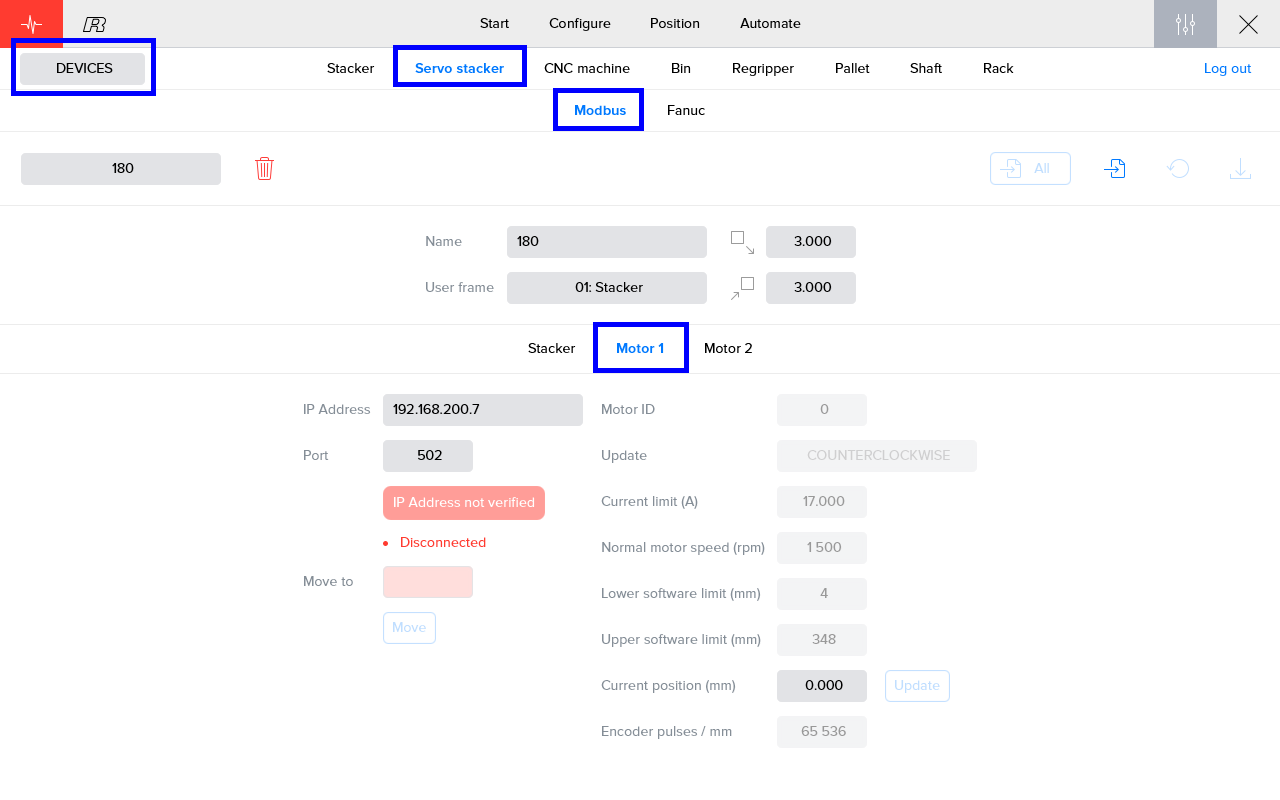
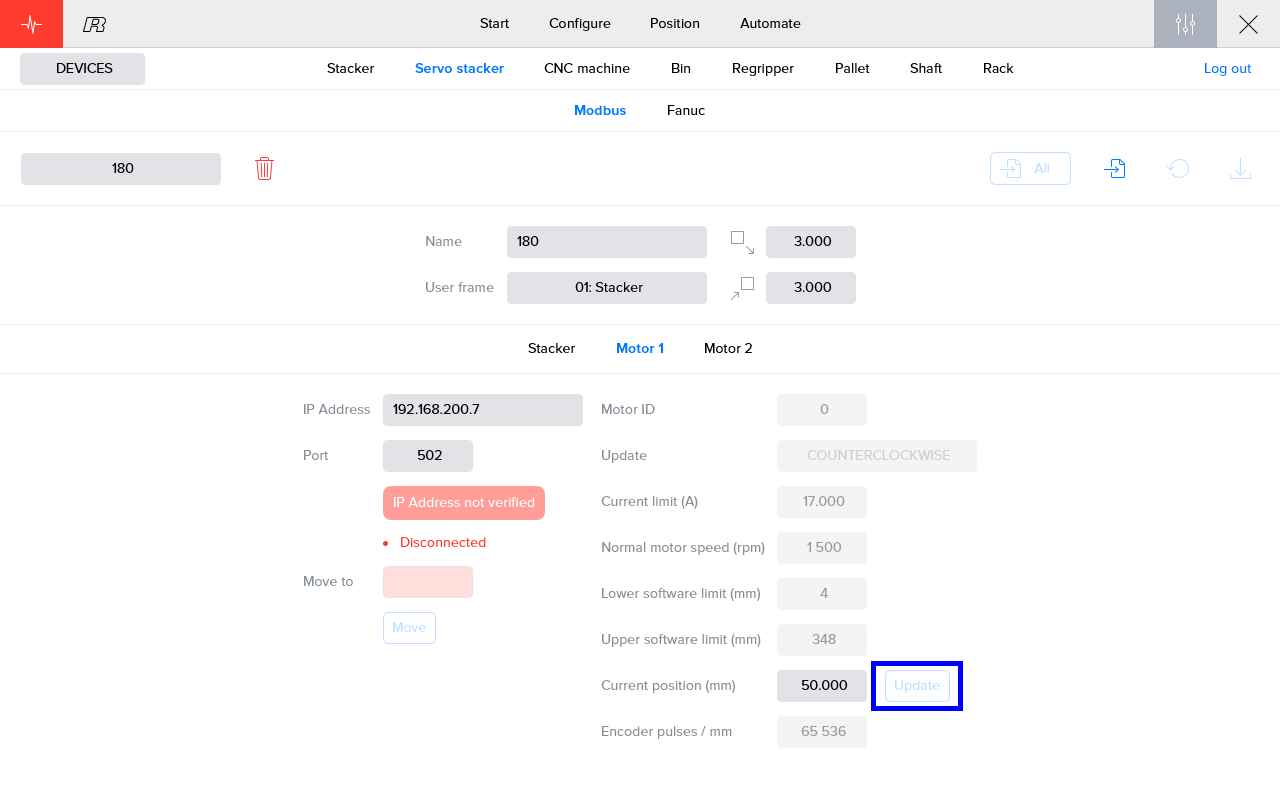
Geben Sie die genaue, zuvor gemessene Tischhöhe ein.In diesem Beispiel betrug der gemessene Abstand 50 mm.
Den eingestellten Wert an die Motorsteuerung senden.
2.4. Neustart des Systems
Fahren Sie das System herunter, und warten Sie mindestens 30 Sekunden, bevor Sie es wieder einschalten.Dadurch wird die neue Konfiguration in der Motorsteuerung aktiviert.
3. So erhalten Sie weitere Hilfe
Zögern Sie nicht, uns zu kontaktieren, wenn Sie zusätzliche Unterstützung benötigen, die über die in der RoboJob Service Knowledge Base bereitgestellten Dokumente hinausgeht.
Sie können die RoboJob-Serviceabteilung auf folgende Weise kontaktieren:
-
Help Center: service.robojob.eu
-
E-Mail: service@robojob.eu
-
Telefon: +49 7134 9199 543
Wir bitten Sie, uns folgende Informationen zur Verfügung zu stellen:
-
Seriennummer xx-xx-xxx
-
Beschreibung des mangelhaften oder defekten Teils
-
Genauer Fehlercode oder Nachricht
-
Was hat der Roboter getan
-
Was sollte der Roboter tun
-
Bilder oder Videos
Sie können diese Informationen per E-Mail an uns senden.Um große Dateien zu senden, können Sie einen Dateiübertragungsdienst wie WeTransfer verwenden: robojob.wetransfer.com.
Eine automatische Bestätigung wird nach Erhalt Ihrer Mail gesendet.